1.本发明涉及玻璃的技术领域,具体而言,涉及一种玻璃转运系统。
背景技术:
2.申请号为201910431729.7的发明专利公开了一种纳米隔热镀膜材料、镀膜玻璃、制备方法。对于该技术而言,在镀膜玻璃的制备过程中,需要用到超纯水清洗设备、风干设备、精密纳米镀膜设备、精密闪干流平设备、精密红外固化设备、精密强冷输送系统、下片输送设备、镀膜洁净室、风淋室。需要涉及到对玻璃大量的转运,因此,如何提高玻璃的转运效率、玻璃的平稳过渡是需要解决的问题。
技术实现要素:
3.本发明的目的是提供一种玻璃转运系统,旨在平稳的在各个设备之间快速、平稳的转运玻璃。
4.本发明的实施例通过以下技术方案实现:
5.一种玻璃转运系统,包括:
6.龙门吊;
7.手臂,手臂设于龙门吊上,且相对两侧分别设有工位;
8.第一夹具,夹具安装在工位上,用于夹持玻璃;
9.第二夹具,第二夹具用于转运第一夹具上的玻璃;
10.第一驱动部,第一驱动部用于驱动第二夹具翻转,使得第二夹具对准第一夹具;
11.第二驱动部,第二驱动部用于驱动第二夹具竖直往复运动;
12.第三驱动部,第三驱动部用于手臂旋转。
13.在本发明的一实施例中,第一夹具包括:
14.第一吸盘,第一吸盘的数量为若干,并设置在工位上;
15.第一真空发生器,第一真空发生器与第一吸盘连接,用于控制第一吸盘正压或负压。
16.在本发明的一实施例中,第二夹具包括:
17.第一架体;
18.滑轨,滑轨与第一架体转动连接;
19.第二架体,第二架体设于滑轨上;
20.第二吸盘,第二吸盘的数量为若干,并设置在第二架体的两侧;
21.第二真空发生器,第二真空发生器与第二吸盘连接,用于控制第二吸盘正压或负压。
22.在本发明的一实施例中,第一驱动部包括第一回转气缸,第一回转气缸用于驱动滑轨旋转。
23.在本发明的一实施例中,第二架体包括:
24.两个平行设置的支撑架,第二吸盘设置在两个支撑架的相背面;
25.第四驱动部,第四驱动部与两个支撑架连接,用于驱动两个支撑架靠近或远离。
26.在本发明的一实施例中,第四驱动部包括:
27.第一丝杆,第一丝杆的两端设有方向相反的螺纹,且第一丝杆的两端分别穿过支撑架;
28.第一电机,第一电机用于驱动丝杆转动。
29.在本发明的一实施例中,第二驱动部包括:
30.底座;
31.第二丝杆,第二丝杆转动设于底座上,且一端穿过第二夹具;
32.齿圈,齿圈套设在第二丝杆上;
33.第一齿轮,第一齿轮与齿圈啮合;
34.第二电机,第二电机用于驱动第一齿轮转动;
35.导向杆,导向杆的一端设置在底座上,另一端穿过第二夹具。
36.在本发明的一实施例中,还包括第五驱动部,第五驱动部用于驱动工位旋转。
37.在本发明的一实施例中,第五驱动部包括:
38.第二齿轮,第二齿轮的两端分别与工位连接;
39.齿条,齿条与齿轮啮合;
40.无杆气缸,无杆气缸的活塞端与齿条连接,用于驱动齿条上下运动。
41.在本发明的一实施例中,手臂包括第一连接臂和第二连接臂,第一连接臂和第二连接臂转动连接;
42.第三驱动部包括第二回转气缸,第二回转气缸用于驱动第二连接臂在第一连接臂上旋转。
43.本发明实施例的技术方案至少具有如下优点和有益效果:
44.本发明实施例的玻璃转运系统,在上料时,龙门吊吊起手臂,驱动手臂纵向、横向移动,并对准玻璃,第三驱动部驱动手臂转动,使得工位上的第一夹具夹持住玻璃,第三驱动部再驱动手臂反向转动,使得另一工位上的第一夹具也夹持住玻璃,龙门吊驱动手臂运动,并到达第二夹具上方,第二驱动部驱动第二夹具向上运动,并夹持住两个玻璃,此时,第一夹具放开夹持,第二驱动部再驱动第二夹具向下运动,且第一驱动部驱动第二夹具翻转,使得玻璃与传送带平行,当一个玻璃与传送带接触后,该侧的第二夹具松开夹持,将玻璃转运至传送带上,第一驱动部再驱动第二夹具翻转180
°
,使得另一个玻璃也与传送带接触后,且该侧的第二夹具也松开夹持,将玻璃转运至传送带上,即一次性完成对两个玻璃的运输;在下料时,第一驱动部驱动第二夹具翻转,使得第二夹具的两侧分别对准传送带上的玻璃,夹持住两个玻璃,第一驱动部再驱动第二夹具90
°
转动,使得玻璃垂直于传送带,龙门吊驱动手臂运动,并到达第二夹具上方,此时,第二驱动部驱动传送带向上运动,使得第一夹具夹持住玻璃,第二夹具松开,龙门吊驱动手臂运动至下一传送带的上方后,再向下运动,第三驱动部驱动手臂正转和反转,使得两个工位上的玻璃全部转运至传送带上。本发明通过第一夹具和第二夹具,一次能转运两个玻璃,且通过第一驱动部、第二驱动部和第三驱动部,使得转运平稳。
附图说明
45.图1为本发明的结构示意图;
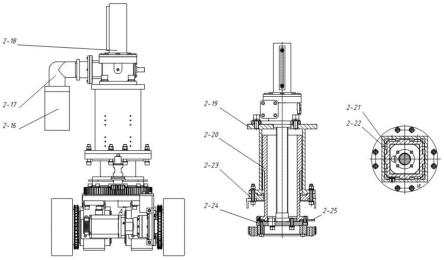
46.图2为手臂、第一夹具和第三驱动部的结构示意图;
47.图3为图2中a处的放大图;
48.图4为第二夹具、第一驱动部和第二驱动部的结构示意图。
49.图标:1-手臂,1a-第一连接臂,1b-第二连接臂,11-工位,2
‑ꢀ
第一吸盘,3-第二夹具,31-第一架体,32-滑轨,33-第二架体,33a
‑ꢀ
支撑架,33b-第一丝杆,33c-第一电机,34-第二吸盘,4-第一回转气缸,5-第二驱动部,51-底座,52-第二丝杆,53-齿圈,54-第一齿轮,55-第二电机,56-导向杆,6-第二回转气缸,7-第五驱动部,71
‑ꢀ
第二齿轮,72-齿条,73-无杆气缸。
具体实施方式
50.为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。通常在此处附图中描述和示出的本发明实施例的组件可以以各种不同的配置来布置和设计。
51.因此,以下对在附图中提供的本发明的实施例的详细描述并非旨在限制要求保护的本发明的范围,而是仅仅表示本发明的选定实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
52.请参照图1-图4,一种玻璃转运系统,包括龙门吊、手臂1、第一夹具、第二夹具3、第一驱动部、第二驱动部5、第三驱动部、第四驱动部和第五驱动部7。本实施例中,龙门吊用于驱动手臂1在工厂内移动,为现有结构,此处不对其做出详述。
53.如图1和图2所示,手臂1包括转动连接的第一连接臂1a和第二连接臂1b,第一夹具包括第一吸盘2和第一真空发生器;第二连接臂1b的底部相对两侧分别转动设有工位11;本实施例中,工位11 上优选设有6个第一吸盘2,第一真空发生器也设置在工位11上,并控制第一吸盘2的正压和负压,从而使得第一吸盘2吸附或松开。本实施例中,第一真空发生器为现有技术,此处不对其做出详述。
54.如图1和图2所示,第三驱动部为第二回转气缸6,第二回转气缸6的输出轴穿过第一连接臂1a与第二连接臂1b连接,通过第二回转气缸6正转或反转,使得第二连接臂1b转动,进而使得两个工位 11分别并行于玻璃,从而使得第一吸盘2对玻璃进行平稳地吸附。
55.如图1和图4所示,第二夹具3包括第一架体31、滑轨32、第二架体33、第二吸盘34和第二真空发生器;第二架体33还包括两个平行设置的支撑架33a和驱动两个支撑架33a靠近或远离的第四驱动部;具体地,第四驱动部包括第一丝杆33b和第一电机33c,且第一丝杆33b两端的螺纹方向相反。
56.滑轨32与第一架体31转动连接,两个支撑架33a分别与滑轨 32滑动连接,第一丝杆33b的两端分别穿过两个支撑架33a,第一电机33c的输出轴与第一丝杆33b连接,通过第一电机33c驱动第一丝杆33b转动,进而使得两个支撑架33a在滑轨32上相向或相反滑动。本实施例中,第二吸盘34优选为4个,分别设置在两个支撑架33a 相背面的端部,第二真空发
生器也设置在支撑架33a上;本实施例中,第二真空发生器为现有技术,此处不对其做出详述。
57.需要说明的是,玻璃从第一吸盘2转移到第二吸盘34上时,两个支撑架33a之间的间隙小于两个工位11之间的间隙;在玻璃转移时,两个支撑架33a位于两个工位11之间,第一电机33c驱动第一丝杆33b转动,使得两个支撑架33a相反滑动,在第二真空发生器的工作下,使得第二吸盘34吸附住玻璃,此时,第一真空发生器使得第一吸盘2为正压状态,即完成了玻璃的转移。玻璃从第二吸盘34 转移到第一吸盘2时,同理,此处不再赘述。
58.如图1和图4所示,第一驱动部为第一回转气缸4,第一回转气缸4的输出轴穿过第一架体31与滑轨32连接,驱动滑轨32转动,进而使得两个支撑架33a上平行于玻璃,从而平稳地吸附住玻璃。
59.如图1和图4所示,第二驱动部5包括底座51、第二丝杆52、齿圈53、第一齿轮54、第二电机55和导向杆56;对应的,第一架体31上设有通孔和螺纹孔;第二丝杆52转动设于底座51上,且一端穿过第一架体31上的螺纹孔,齿圈53套设在第二丝杆52上,第二电机55的输出轴与第一齿轮54连接,且第一齿轮54与齿圈53啮合,通过第二电机55驱动第一齿轮54转动,且由于第一齿轮54与齿圈53啮合,进而使得第二丝杆52转动,从而带动第一架体31上下运动。导向杆56的一端设置在底座51上,另一端穿过第一架体 31上的通孔,使得第一架体31上下运动的过程更加平稳。
60.如图3所示,第五驱动部7用于驱动工位11旋转,具体的,第五驱动部7包括第二齿轮71、齿条72和无杆气缸73;第二齿轮71 的两端分别与工位11连接,无杆气缸73设置在第二连接臂1b的底部,且活塞端与齿条72连接,齿条72与齿轮啮合;通过无杆气缸 73带动齿条72上下运动,进而使得齿轮转动,从而带动工位11转动。
61.需要说明的是,由于工序的各个设备之间的进料口宽度不同,且玻璃一般都为长方形结构,因此,通过工位11转动,调整玻璃的方向,使之与各个的设备的进料口匹配。
62.本实施例的工作原理如下:
63.在上料时:龙门吊吊起手臂1,驱动手臂1纵向、横向移动,并对准玻璃,第二回转气缸6正转或反转,使得第二连接臂1b转动,进而使得两个工位11分别并行于玻璃,第一真空发生器使得第一吸盘2为负压,从而吸附住玻璃,龙门吊驱动手臂1运动,并到达第二夹具3上方,第二电机55驱动第一齿轮54转动,且由于第一齿轮 54与齿圈53啮合,进而使得第二丝杆52转动,从而带动第一架体 31向上运动,使得两个支撑架33a位于两个工位11之间,第一电机 33c驱动第一丝杆33b转动,使得两个支撑架33a相反滑动,在第二真空发生器的工作下,使得第二吸盘34吸附住玻璃,此时,第一真空发生器使得第一吸盘2为正压状态,即玻璃转移到了第二夹具3上,第一电机33c反转,第二电机55反转,驱动第一架体31向下运动,同时,第一回转气缸4驱动滑轨32旋转,使得两个支撑架33a平行于设备前方的传送带,并与传送带接触,第二真空发生器使得接触侧的第二吸盘34为正压,松开玻璃,另一侧同理;在第一吸盘2和第二吸盘34转移玻璃之前,如若有必要,无杆气缸73带动齿条72上下运动,进而使得齿轮转动,从而带动工位11转动90
°
,改变玻璃的方向。
64.在下料时,第一回转气缸4使得滑轨32转动,使得两个支撑架 33a转动,在第二真空发生器的作用下,两个支撑架33a上的第二吸盘34分别吸附住玻璃,第一回转气缸4再驱动滑轨32转动90
°
,使得两个支撑架33a垂直于传送带,第二电机55转动,驱动第一架体31向
上移动,使得两个玻璃位于两个工位11外部,第一电机33c 驱动第一丝杆33b转动,两个支撑架33a相向滑动,使得玻璃与第一吸盘2接触,在第一真空发生器的工作下,使得第一吸盘2吸附住玻璃,此时,第二真空发生器使得第二吸盘34为正压状态,即完成了玻璃的转移,龙门吊吊起手臂1,驱动手臂1纵向、横向移动至下一设备的进料口,在有需要时,无杆气缸73带动齿条72上下运动,进而使得齿轮转动,从而带动工位11转动90
°
,改变玻璃的方向;第二回转气缸6正转或反转,使得第二连接臂1b转动,进而使得两个工位11分别并行于传送带,并放下玻璃。
65.以上仅为本发明的优选实施例而已,并不用于限制本发明,对于本领域的技术人员来说,本发明可以有各种更改和变化。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。