1.本发明属于农业机械技术领域,尤其涉及一种草料切割打捆装置及方法。
背景技术:
2.目前,现有技术中的打捆机能够实现将稻草、麦草、豆秆、秸秆、牧草等草料压缩成捆的功能。
3.打捆机出料口一般为横截面为矩形的筒状,在打捆机出料口的外侧套筒状打包袋,在块状草料推出打捆机出料口的同时,将打包袋套在块状草料上,完成块状草料的打包。
4.上述草料打捆机虽然能够方便草料的运输,但在将压缩成块的草料运输到目的地后,使用时,需要人工将块状的草料拆分成小块使用,一方面浪费了人力,另一方面拆分效果较差,精度较低,故而需要一种具有切割功能的打捆装置来解决上述所提出的问题。
技术实现要素:
5.针对现有技术的不足,本发明提供了一种草料切割打捆装置及方法,解决了上述问题。
6.为实现以上目的,本发明通过以下技术方案予以实现:一种草料切割打捆装置,包括箱体、控制器以及底座,所述控制器嵌入固定设置在箱体上,所述箱体上开设有进料口以及出料口,所述箱体位于进料口以及出料口的位置均安装有自动移门a,还包括:
7.打捆机构,与箱体连接,用于对草料进行打捆处理,所述打捆机构包括打捆模块a以及打捆模块b;
8.切割机构,与箱体连接,用于对草料进行切割处理,所述切割机构包括切割仓、切割支架、切刀、位置检测组件以及用于分割切割仓以及箱体的自动移门b,所述切割仓连接在箱体上且与箱体贯通,所述自动移门b安装在箱体,所述切割仓的仓体尺寸不小于草料打捆尺寸。
9.在上述技术方案的基础上,本发明还提供以下可选技术方案:
10.进一步的技术方案:所述打捆模块a包括液压杆a、压板a以及称重传感器a,所述压板a与液压杆a连接,所述液压杆a与箱体连接,所述称重传感器a嵌入设置在箱体内且与进料口线性排列。
11.进一步的技术方案:所述打捆模块b位于打捆模块a一侧,所述打捆模块b包括液压杆b、压板b、打包模块以及称重传感器b,所述压板b与液压杆b连接,所述液压杆b与箱体连接,所述称重传感器b固定安装在箱体内且位于称重传感器a一侧。
12.进一步的技术方案:所述切割支架包括纵向导轨、水平旋转机构以及切刀夹具,所述纵向导轨上安装有横向导轨以及纵向伸缩支架,所述纵向伸缩支架上安装有水平旋转机构,所述水平旋转机构上安装有横向伸缩机构,所述切刀夹具安装在横向伸缩机构上,所述切刀安装在切刀夹具上。
13.进一步的技术方案:所述位置检测组件包括激光测距传感器以及,所述激光测距传感器安装在切刀夹具上,所述固定安装在箱体内部靠近出料口一侧。
14.进一步的技术方案:所述压板a以及压板b均为抗冲击的高密度小孔径丝网且其尺寸贴合箱体内腔。
15.进一步的技术方案:所述压板a以及压板b上均安装有位置传感器a。
16.进一步的技术方案:所述底座上安装有用于将草料输入箱体的进料模块以及用于将草料输出箱体的出料模块。
17.基于上述装置的草料切割打捆方法,包括以下步骤:
18.s1:开启装置,进行设置自检,检测各模块是否恢复至默认状态,如没有则通过控制器自带的显示屏进行弹窗警示,提醒操作人员设备出现异常,自检未通过,若自检通过,则装置进行正常工作,默认状态包括自移动门a关闭、自移动门b关闭、压板a以及压板b移动至起始位置等,不包括上一次操作设定好的工作参数,这些工作参数将进行保留,包括称重传感器a以及称重传感器b设定阈值、草料打捆重量与打捆尺寸对应关系表;
19.s2:根据设定的草料打捆尺寸,在控制器触摸屏上将该尺寸打捆草料可视化显示,操作人员进行分割数目及分割尺寸参数设定,以箱体右后侧位置为基准坐标点,由下至左依次对各尺寸分割草料进行编号,并同步生成切割效果进行显示,支持对分割参数设定过程中的错误进行弹窗提示,直至完成分割参数设定;
20.s3:开始切割打捆作业,此时开启进料口自移动门,通过进料模块将草料输送至箱体内,并通过进料口下方的称重传感器a进行称重,达到设定阈值时,打捆模块a块的压板a推至其终止位置,然后将打捆模块b的压板推至其终止位置a,再将打捆模块a和打捆模块a的压板推至各自的起始位置,循环此过程进行草料压缩,需要注意的是,在此循环过程中停止进料模块的进料,待打捆模块a块的压板回到起始位置时,继续进料模块的进料,此时停止该循环过程,并再次读取称重传感器a数值并与设定阈值比较,重复步骤;
21.s4:读取箱体底部右侧安装的称重传感器b数值,并与设定的草料打捆重量比对,两者差值绝对值首次不大于进料口下方的称重传感器a的设定阈值时,此时将进料口下方的称重传感器a的设定阈值临时变更为该差值绝对值,进行下一次进料后再变更回原设定阈值。
22.s5:按步骤3中的工作方式进行下一次进料,将打捆模块a块的压板a停留至其终止位置,打捆模块b的压板b停留至其终止位置a,读取设定的草料分割数目和尺寸,以箱体右后侧位置为基准坐标点,自动生成各编号分割草料的右上、左下坐标点,并通过坐标系转换成各编号分割草料对应的切刀的水平移动坐标点和纵向移动距离,即箱体纵向高度,此纵向高度也是草料打捆厚度,各分割草料厚度相同;
23.s6:读取转换后生成的各编号分割草料对应的切刀的水平移动坐标点,依次对各编号分割草料完成分割。具体为:
24.首先,开启箱体的顶部右侧位置处开设的自移动门,通过切刀在横向导轨和纵向导轨的移动,将其移至编号a右上坐标对应的切刀水平移动坐标点,若未能达到该坐标点,则再借助水平旋转机构和横向伸缩支架将其移至该坐标点,借助切刀夹具上安装的激光测距传感器信号,通过纵向伸缩支架将切刀移至草料上表面,根据切刀水平移动坐标点和纵向移动距离完成编号a草料分割,在此过程中通过水平旋转机构来调节切刀的横向和纵向
方向。
25.其次,借助切刀夹具上安装的激光测距传感器信号,将切刀移至草料上表面,并移至编号b右上坐标对应的切刀水平移动坐标点,重复上述过程直至完成全部编号的草料分割。
26.最后,将切刀移回至切割仓,关闭箱体的顶部右侧位置处开设的自移动门b;
27.s7:通过打捆模块b的打包模块进行打包,待打包完成后,打开出料口自移动门a,开启打捆模块b的压板移动至其终止位置b,将打捆好的分割草料推出到出料模块,开启出料模块进行输送;
28.s8:完成全部草料分割打捆后,恢复各模块至默认值或用户设定值,关机。
29.有益效果
30.本发明提供了一种草料切割打捆装置及方法,与现有技术相比具备以下有益效果:
31.1、能够通过控制器设定分割参数并控制切刀对经过打捆机构打捆后的材料进行切割处理,由于切刀采用三面开刃的方式,可以在水平移动中完成切割,提升了切割效率,保证了切割整齐性;
32.2、切刀的运动轨迹可控,使用灵活方便,能够根据相关技术人员的需求对切刀的运行轨迹进行调节。
附图说明
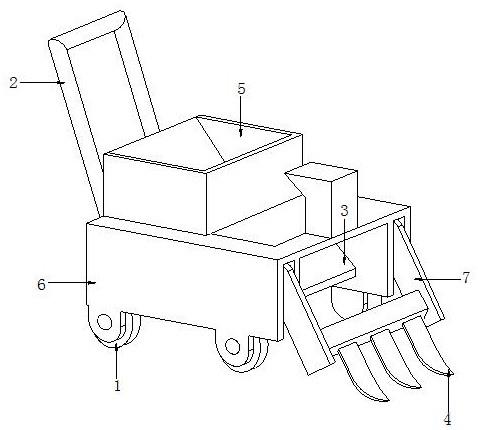
33.图1为本发明整体结构示意图。
34.图2为本发明切割支架的结构示意图。
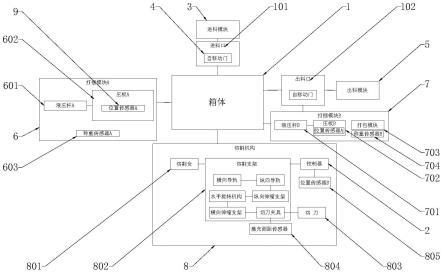
35.附图标记注释:1、箱体;101、进料口;102、出料口;2、控制器;3、进料模块;4、自动移门a;5、出料模块;6、打捆模块a;601、液压杆a;602、压板a;603、称重传感器a;7、打捆模块b;701、液压杆b;702、压板b;703、打包模块;704、称重传感器b;8、切割机构;801、切割仓;802、切割支架;8021、横向导轨;8022、纵向导轨;8023、纵向伸缩支架;8024、水平旋转机构;8025、横向伸缩机构;8026、切刀夹具;803、切刀;804、激光测距传感器;9、位置传感器a。
具体实施方式
36.为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
37.以下结合具体实施例对本发明的具体实现进行详细描述。
38.请参阅图1~2,为本发明一种实施例提供的,一种草料切割打捆装置,包括箱体1、控制器2以及底座(图中未标出),所述控制器2嵌入固定设置在箱体1上,所述箱体1上开设有进料口101(箱体1顶端中部)以及出料口102(箱体1背面右侧),所述箱体1与底座连接,所述进料口101开设在箱体1远离底座一端的中部位置(箱体1顶端中部),所述出料口102开设在箱体1边侧(箱体1背面右侧),还包括:
39.打捆机构,与箱体1连接,用于对草料进行打捆处理,所述打捆机构包括打捆模块a6以及打捆模块b7;
40.切割机构8,与箱体1连接,用于对草料进行切割处理,所述切割机构8包括切割仓801、切割支架802、切刀803、位置检测组件以及用于分割切割仓801以及箱体1的自动移门b(图中未标出),所述切割仓801连接在箱体1上(进料口101边侧即箱体1的顶部右侧)且与箱体1贯通,所述自动移门b安装在箱体1,所述切割仓801的仓体尺寸不小于草料打捆尺寸;
41.所述切割支架802包括纵向导轨8022、水平旋转机构8024以及切刀夹具8026,所述纵向导轨8022上安装有横向导轨8021以及纵向伸缩支架8023,所述纵向伸缩支架8023上安装有水平旋转机构8024,所述水平旋转机构8024上安装有横向伸缩机构8025,所述切刀夹具8026安装在横向伸缩机构8025上,所述切刀803安装在切刀夹具8026上;
42.所述位置检测组件包括激光测距传感器804以及805,所述激光测距传感器804安装在切刀夹具8026上,所述805固定安装在箱体1内部靠近出料口102一侧(箱体1内腔右后侧)。
43.优选的,所述箱体1位于进料口101以及出料口102的位置均安装有自动移门a4。此种设置的目的在于,对箱体1进行密闭或贯通,即对草料的进出进行控制。
44.优选的,所述切刀803为锯齿合金刀,左右下三侧均为刀刃,垂直向下,安装方向与所述横向伸缩支架一致。
45.在本发明实施例中,打捆模块a6对经过进料口101进入箱体1内的草料进行压缩成块并将其推入打捆模块b7处进行打捆打包处理,此时控制器2通过分别启动横向导轨8021、纵向导轨8022、纵向伸缩支架8023、水平旋转机构8024以及横向伸缩机构8025移动切刀803夹具切刀夹具8026在箱体1内进行空间内的移动,同时位置检测组件中的激光测距传感器804以及805通过调控切刀803的运动轨迹对草料切割尺寸进行控制的方式,实现对草料进行定量切割打捆的技术效果。
46.请参阅图1,作为本发明的一种实施例,所述打捆模块a6包括液压杆a601、压板a602以及称重传感器a603,所述压板a602与液压杆a601连接,所述液压杆a601与箱体1连接,所述称重传感器a603嵌入设置在箱体1内且与进料口101线性排列,所述打捆模块b7位于打捆模块a6一侧,所述打捆模块b7包括液压杆b701、压板b702、打包模块703以及称重传感器b704,所述压板b702与液压杆b701连接,所述液压杆b701与箱体1连接,所述称重传感器b704固定安装在箱体1内且位于称重传感器a603一侧。
47.优选的,所述压板a602以及压板b702均为抗冲击的高密度小孔径丝网且其尺寸贴合箱体1内腔。此种设置的目的在于,保证草料在打捆过程中不会出现漏过压板的情况。
48.优选的,所述压板a602以及压板b702上均安装有位置传感器a9,用于调整各自的压板位置,包括各自的起始位置、终止位置。其中所述打捆模块a6的起始位置为所述进料口101位置处,所述打捆模块a6的终止位置处根据草料打捆尺寸经调试确定;所述打捆模块b7的起始位置为所述箱体1的内腔壁处,所述打捆模块b7的终止位置a根据草料打捆尺寸经调试确定,所述打捆模块b7的终止位置b保证将打捆好的草料推出至所述出料模块5即可。
49.优选的,所述底座上安装有用于将草料输入箱体1的进料模块3以及用于将草料输出箱体1的出料模块5,所述进料模块3以及出料模块5均为皮带输送机、滚筒输送机以及螺旋输送机中的任一种。此种设置的目的在于,对草料进行输入以及输出。
50.在本发明实施例中,液压杆a601推动压板a602在箱体1内进行线性运动对草料进行压缩成块并将其推至打捆模块b7处,打捆模块b7利用液压杆b701推动压板b702将块状草
料推出出料口102,同时打包模块703将打包袋套在块状草料上,完成块状草料的打包。
51.一种基于上述装置的草料切割打捆方法,包括以下步骤:
52.s1:开启装置,进行设置自检,检测各模块是否恢复至默认状态,如没有则通过控制器2自带的显示屏进行弹窗警示,提醒操作人员设备出现异常,自检未通过,若自检通过,则装置进行正常工作,所述默认状态包括自移动门a关闭、自移动门b关闭、压板a602以及压板b702移动至起始位置等,不包括上一次操作设定好的工作参数,这些工作参数将进行保留,包括称重传感器a603以及称重传感器b704设定阈值、草料打捆重量与打捆尺寸对应关系表(该关系表经调试给出并预存);
53.s2:根据设定的草料打捆尺寸,在控制器2触摸屏上将该尺寸打捆草料可视化显示,操作人员进行分割数目及分割尺寸参数设定(以所述箱体1右后侧位置为基准坐标点,由下至左依次对各尺寸分割草料进行编号),并同步生成切割效果进行显示,支持对分割参数设定过程中的错误进行弹窗提示,直至完成分割参数设定;
54.s3:开始切割打捆作业,此时开启所述进料口101自移动门,通过进料模块3将草料输送至箱体1内,并通过进料口101下方的称重传感器a603进行称重,达到设定阈值时,打捆模块a6块的压板a602推至其终止位置,然后将打捆模块b7的压板推至其终止位置a,再将打捆模块a6和打捆模块a6的压板推至各自的起始位置,循环此过程进行草料压缩,需要注意的是,在此循环过程中停止所述进料模块3的进料,待所述打捆模块a6块的压板回到起始位置时,继续进料模块3的进料,此时停止该循环过程,并再次读取称重传感器a603数值并与设定阈值比较,重复步骤3;
55.s4:读取所述箱体1底部右侧安装的称重传感器b704数值,并与设定的草料打捆重量比对,两者差值绝对值首次不大于所述进料口101下方的称重传感器a603的设定阈值时,此时将进料口101下方的称重传感器a603的设定阈值临时变更为该差值绝对值,进行下一次进料后再变更回原设定阈值。
56.s5:按步骤3中的工作方式进行下一次进料,将所述打捆模块a6块的压板a602停留至其终止位置,所述打捆模块b7的压板b702停留至其终止位置a,读取设定的草料分割数目和尺寸,以箱体1右后侧位置为基准坐标点,自动生成各编号分割草料的右上、左下坐标点,并通过坐标系转换成各编号分割草料对应的所述切刀803的水平移动坐标点和纵向移动距离(即所述箱体1纵向高度,此纵向高度也是草料打捆厚度,各分割草料厚度相同);
57.s6:读取转换后生成的各编号分割草料对应的所述切刀803的水平移动坐标点,依次对各编号分割草料完成分割。具体为:
58.首先,开启所述箱体1的顶部右侧位置处开设的自移动门,通过所述切刀803在横向导轨8021和纵向导轨8022的移动,将其移至编号a右上坐标对应的切刀803水平移动坐标点,若未能达到该坐标点,则再借助所述水平旋转机构8024和所述横向伸缩支架将其移至该坐标点,借助所述切刀803夹具上安装的激光测距传感器804信号,通过纵向伸缩支架8023将所述切刀803移至草料上表面,根据切刀803水平移动坐标点和纵向移动距离完成编号a草料分割,在此过程中通过所述水平旋转机构8024来调节所述切刀803的横向和纵向方向。
59.其次,借助切刀803夹具上安装的激光测距传感器804信号,将切刀803移至草料上表面,并移至编号b右上坐标对应的所述切刀803水平移动坐标点,重复上述过程直至完成
全部编号的草料分割。
60.最后,将切刀803移回至所述切割仓,关闭箱体1的顶部右侧位置处开设的自移动门b;
61.s7:通过打捆模块b7的打包模块703进行打包,待打包完成后,打开所述出料口102自移动门a,开启所述打捆模块b7的压板移动至其终止位置b,将打捆好的分割草料推出到所述出料模块5,开启出料模块5进行输送;
62.s8:完成全部草料分割打捆后,恢复各模块至默认值或用户设定值,关机。
63.优选的,在s6中,为了进一步提升分割效率,支持采用神经网络算法对所述切刀803的水平移动坐标点进行移动线路优化。
64.需要说明的是,在本文中,诸如第一和第二等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。而且,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。
65.尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。