1.本发明涉及一种钢质竖直壁面纵横爬行的机器人结构,属于机械设计领域。
背景技术:
2.钢质竖直壁面是船舶、海上平台等海洋工程装备的主要结构形式之一。由于船舶、海上平台等长期处于高湿、高盐等恶劣环境下,其壁面极易发生腐蚀、变形、裂纹、附着海上生物等问题,危机装备整体的安全。因此,需要经常对船舶、海上平台等装备的壁面进行检测、除锈、打磨、喷漆等作业。目前,现场主要是采用人工的方式从事以上作业,存在劳动强度大、作业风险高、成本高等问题。以爬壁机器人代替人工作业是未来科技发展的必然趋势。相对于水平壁面而言,机器人在竖直壁面上爬行作业难度更大。本发明针对钢质竖直壁面,开发了一种可在壁面上纵横往复爬行的机器人结构,可搭载检测、打磨等执行机构和系统,代替人工进行日常检测、维保等作业。
技术实现要素:
3.本发明以船舶、海上平台等钢质竖直壁面结构为应用对象,开发一种可在壁面上纵横往复爬行的机器人结构。为实现上述目标,本发明采用以下技术方案:所述的机器人结构由主框架组件、外腿框架组件、内腿框架组件、舵机组件构成。
4.所述的主框架组件由一个外框和一个内框组成。外框是由两根横杆(1)和两根纵杆(3)构成的“口”字型框架,“口”字型框架的拐角处由内置式“l”型连接件及螺钉固定。内框由两根纵杆(3)及两根短横杆(4)构成的“井”字形框架,“井”字形框架的拐角处通过直角连接件(2)、内置船形螺母 螺栓固定。内框的两根纵杆(3)的端部均通过直角连接件(2)、内置船形螺母 螺栓与外框两根横杆(1)的内侧固定。两根横杆(1)、四根纵杆(3)、两根短横杆(4)均由铝合金型材截取制成。
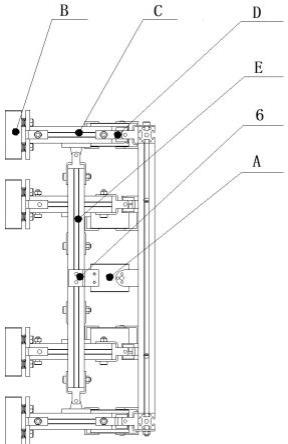
5.所述的外腿框架组件是由四个平行四边形构成的正方体框架机构。每个平行四边形由主框架“口”字型外框的一个边、两条腿组件(c)、外横支组件(e)构成。两条腿组件(c)通过上端的“u”型连接件(14)、内六角螺栓 螺母(16)固定在主框架组件外框横杆(1)的端部,且“u”型连接件(14)的一侧紧靠两根纵杆(3)的内侧。外横支组件(e)的两端均通过外铰接架(18)的底座及螺栓 船形螺母分别固定在两条腿杆(22)的中间部位。
6.腿组件(c)由腿杆(22)、“u”型连接件(14)固定、万向关节组件(d)、磁吸组件(b)构成。腿杆(22)的上端通过内六角螺栓 螺母(16)与“u”型连接件(14)固定,“u”型连接件(14)的底部与万向关节组件(d)的下关节(21)相连。万向关节组件(d)由上关节(19)、中关节(20)、下关节(21)及两根芯轴构成,上关节(19)通过芯轴与中关节(20)相连,中关节通过芯轴与下关节(21)相连。上关节(19)亦连接一个“u”型连接件(14)。磁吸组件(b)由电磁铁(10)、弹簧(11)、脚板(12)、“u”型连接件(14)构成。电磁铁(10)与脚板(12)之间内置两个根弹簧(11),并通过两个外六角螺栓(13)连接。“u”型连接件(14)的底部限位在脚板(12)底部中间的槽内。磁吸组件(b)通过“u”型连接件(14)与腿组件(c)腿杆(22)的下端相连,并通过
内六角螺栓 螺母(16)。
7.外横支组件(e)由外横支杆(17)、“u”型连接件(14)、内铰接架(15)、外铰接架(18)构成。外横支杆(17)的两端分别通过内六角螺栓 螺母(16)固定一个“u”型连接件(14),每个“u”型连接件(14)的底部与一个内铰接架(15)相连,每个内铰接架(15)通过芯轴与一个外铰接架(18)铰接。
8.所述的内腿框架组件是由四个平行四边形构成的正方体框架结构。每个平行四边形由主框架“井”字型内框的一个边、两条腿组件(c)、内横支组件(f)构成。两条腿组件(c)通过上端的“u”型连接件(14)、内六角螺栓 螺母(16)固定在主框架组件内框的纵杆(3)两侧,且“u”型连接件(14)的一侧紧靠两根短横杆(4)的外侧。内横支组件(f)的两端均通过外铰接架(18)的底座及螺栓 船形螺母分别固定在两条腿杆(22)的中间部位。
9.内横支组件(f)的内横支杆(5)与外横支组件(e)的外横支杆(17)长度不同,其它结构及连接方式与外横支组件(e)完全相同。
10.所述的舵机组件(a)由舵机(8)、上“u”型架(7)、下“u”型架(9)构成。舵机(8)为双输出轴结构,上“u”型架(7)与舵机(8)的两个输出轴相连,下“u”型架(9)通过螺钉与舵机(8)本体下端固定。八组舵机组件(a)的上“u”型架(7)底部分别通过螺钉 船形螺母固定在八个平行四边形的主框架边的中间部位,八组舵机组件(a)的下“u”型架(9)的分别通过螺钉 船形螺母 辅助“l”型连接件(6)固定在八个平行四边形的横支边的中间部位。
11.与现有技术相比较,本发明具有以下优点:1、机器人外/内腿框架组件均由四个平行四边形机构构成,其中包括两个纵移平行四边形机构和两个横移平行四边形机构。通过外/内腿框架组件四个纵移平行四边形机构的变形控制,可实现机器人纵向往复步进式移动。通过外/内腿框架组件四个横移平行四边形机构的变形控制,可实现机器人横向往复步进式移动。机器人整体结构及运动控制简单。
12.2、机器人在壁面的状态可分为初始、爬行和作业三种状态。当机器人处于作业状态时,八条腿的电磁铁同时与壁面吸附,且机器人重心离壁面最近,提高了机器人在作业反作用力情况下的稳固性。
13.3、机器人磁吸组件的电磁铁与脚板之间内置有弹簧,机器人落脚后,通过各电磁铁对弹簧的压缩,使电磁铁更好地配合弧形壁面。
14.4、机器人采用腿足式结构,可以实现对一定高度障碍的跨越。
附图说明
15.图1 机器人运动原理图图2机器人主视图图3机器人左视图图4横支杆组件主视图图5横支杆组件俯视图图6 舵机组件主视图图7 舵机组件左视图图8腿组件主视图
图9腿组件左视图图中:1、横杆,2、直角连接件,3、纵杆,4、横杆,5、内横支杆,6、辅助“l”型连接件,7、上“u”型架,8、舵机,9、下“u”型架,10、电磁铁,11、弹簧,12、脚板,13、外六角螺栓,14、“u”型连接件,15、内铰接架,16、内六角螺栓 螺母,17、外横支杆,18、外铰接架,19、上关节,20、中关节,21、下关节,22、腿杆a、舵机组件,b、磁吸组件c、腿组件,d、万向关节组件,e、外横支组件,f、内横支组件
具体实施方式
16.为能进一步了解本发明的发明内容、特点及功效,兹例举以下实施例,并配合附图详细说明如下:机器人运动原理请参阅图1,机器人纵向移动时,外/内腿组的横移平行四边形机构均处于矩形状态。机器人横向移动时,外/内腿组的纵移平行四边形机构均处于矩形状态。机器人纵向移动与横向移动原理相同,以机器人向下纵向移动为例进行说明:机器人初始状态(s1),外/内腿组的纵移平行四边形机构均处于矩形状态,八个电磁铁与壁面均处于通电吸附状态。
17.机器人运动状态(s2),外腿组电磁铁均断电,外腿组纵移平行四边形机构在相应舵机的驱动下向下偏斜一定角度。内腿组的纵移平行四边形机构保持矩形状态,内腿组电磁铁均通电吸附。
18.机器人作业状态(s3),内腿组电磁铁保持通电吸附。内腿组的纵移平行四边形机构在相应舵机的驱动下向下偏斜一定角度。外腿组纵移平行四边形机构保持倾斜状态,当外腿组电磁铁与壁面接触后通电吸附。该状态下,机器人重心离壁面最近,且吸附最稳固,为机器人作业状态。
19.机器人运动状态(s4),内腿组电磁铁断电。内腿组的纵移平行四边形机构保持倾斜状态。外腿组电磁铁与壁面保持通电吸附状态,外腿组纵移平行四边形机构在相应舵机的驱动下向下偏斜一定角度,恢复到矩形状态。
20.机器人运动状态(s5),外腿组电磁铁与壁面保持通电吸附状态,外腿组纵移平行四边形机构保持矩形状态。内腿组的纵移平行四边形机构在相应舵机的驱动下向下偏斜一定角度,恢复到矩形状态,当内腿组电磁铁与壁面接触后通电吸附。机器人恢复到初始状态,完成一个步长的下移及作业动作。
21.机器人结构图请参阅图2至图9。
22.所述的机器人结构由主框架组件、外腿框架组件、内腿框架组件、舵机组件构成。
23.所述的主框架组件由一个外框和一个内框组成。外框是由两根横杆(1)和两根纵杆(3)构成的“口”字型框架,“口”字型框架的拐角处由内置式“l”型连接件及螺钉固定。内框由两根纵杆(3)及两根短横杆(4)构成的“井”字形框架,“井”字形框架的拐角处通过直角连接件(2)、内置船形螺母 螺栓固定。内框的两根纵杆(3)的端部均通过直角连接件(2)、内置船形螺母 螺栓与外框两根横杆(1)的内侧固定。两根横杆(1)、四根纵杆(3)、两根短横杆(4)均由铝合金型材截取制成。
24.所述的外腿框架组件是由四个平行四边形构成的正方体框架机构。每个平行四边
形由主框架“口”字型外框的一个边、两条腿组件(c)、外横支组件(e)构成。两条腿组件(c)通过上端的“u”型连接件(14)、内六角螺栓 螺母(16)固定在主框架组件外框横杆(1)的端部,且“u”型连接件(14)的一侧紧靠两根纵杆(3)的内侧。外横支组件(e)的两端均通过外铰接架(18)的底座及螺栓 船形螺母分别固定在两条腿杆(22)的中间部位。
25.腿组件(c)由腿杆(22)、“u”型连接件(14)固定、万向关节组件(d)、磁吸组件(b)构成。腿杆(22)的上端通过内六角螺栓 螺母(16)与“u”型连接件(14)固定,“u”型连接件(14)的底部与万向关节组件(d)的下关节(21)相连。万向关节组件(d)由上关节(19)、中关节(20)、下关节(21)及两根芯轴构成,上关节(19)通过芯轴与中关节(20)相连,中关节通过芯轴与下关节(21)相连。上关节(19)亦连接一个“u”型连接件(14)。磁吸组件(b)由电磁铁(10)、弹簧(11)、脚板(12)、“u”型连接件(14)构成。电磁铁(10)与脚板(12)之间内置两个根弹簧(11),并通过两个外六角螺栓(13)连接。“u”型连接件(14)的底部限位在脚板(12)底部中间的槽内。磁吸组件(b)通过“u”型连接件(14)与腿组件(c)腿杆(22)的下端相连,并通过内六角螺栓 螺母(16)。
26.外横支组件(e)由外横支杆(17)、“u”型连接件(14)、内铰接架(15)、外铰接架(18)构成。外横支杆(17)的两端分别通过内六角螺栓 螺母(16)固定一个“u”型连接件(14),每个“u”型连接件(14)的底部与一个内铰接架(15)相连,每个内铰接架(15)通过芯轴与一个外铰接架(18)铰接。
27.所述的内腿框架组件是由四个平行四边形构成的正方体框架结构。每个平行四边形由主框架“井”字型内框的一个边、两条腿组件(c)、内横支组件(f)构成。两条腿组件(c)通过上端的“u”型连接件(14)、内六角螺栓 螺母(16)固定在主框架组件内框的纵杆(3)两侧,且“u”型连接件(14)的一侧紧靠两根短横杆(4)的外侧。内横支组件(f)的两端均通过外铰接架(18)的底座及螺栓 船形螺母分别固定在两条腿杆(22)的中间部位。
28.内横支组件(f)的内横支杆(5)与外横支组件(e)的外横支杆(17)长度不同,其它结构及连接方式与外横支组件(e)完全相同。
29.所述的舵机组件(a)由舵机(8)、上“u”型架(7)、下“u”型架(9)构成。舵机(8)为双输出轴结构,上“u”型架(7)与舵机(8)的两个输出轴相连,下“u”型架(9)通过螺钉与舵机(8)本体下端固定。八组舵机组件(a)的上“u”型架(7)底部分别通过螺钉 船形螺母固定在八个平行四边形的主框架边的中间部位,八组舵机组件(a)的下“u”型架(9)的分别通过螺钉 船形螺母 辅助“l”型连接件(6)固定在八个平行四边形的横支边的中间部位。
30.尽管上面结合附图对本发明的优选实施例进行了描述,但是本发明并不局限于上述的具体实施方式,上述的具体实施方式仅仅是示意性的,并不是限制性的,本领域的普通技术人员在本发明的启示下,在不脱离本发明宗旨和权利要求所保护的范围情况下,还可以作出很多形式,这些均属于本发明的保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。