技术特征:
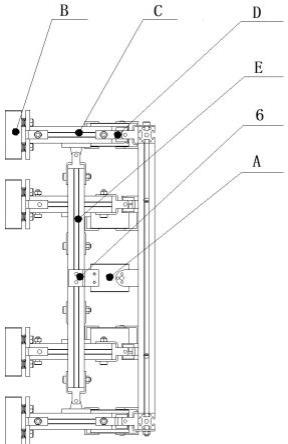
1.一种钢质竖直壁面纵横爬行的机器人结构,其特征在于:机器人结构由主框架组件、外腿框架组件、内腿框架组件、舵机组件构成;通过机器人外/内腿框架组件的四个纵移平行四边形结构的变形控制,配合电磁铁的通断电控制,实现机器人的纵向移动;通过机器人外/内腿框架组件的四个横移平行四边形结构的变形控制,配合电磁铁的通断电控制,实现机器人的横向移动;机器人整体结构及运动控制简单;所述的主框架组件由一个外框和一个内框组成;外框是由两根横杆(1)和两根纵杆(3)构成的“口”字型框架,“口”字型框架的拐角处由内置式“l”型连接件及螺钉固定;内框由两根纵杆(3)及两根短横杆(4)构成的“井”字形框架,“井”字形框架的拐角处通过直角连接件(2)、内置船形螺母 螺栓固定;内框的两根纵杆(3)的端部均通过直角连接件(2)、内置船形螺母 螺栓与外框两根横杆(1)的内侧固定;两根横杆(1)、四根纵杆(3)、两根短横杆(4)均由铝合金型材截取制成;所述的外腿框架组件是由四个平行四边形构成的正方体框架机构;每个平行四边形由主框架“口”字型外框的一个边、两条腿组件(c)、外横支组件(e)构成;两条腿组件(c)通过上端的“u”型连接件(14)、内六角螺栓 螺母(16)固定在主框架组件外框横杆(1)的端部,且“u”型连接件(14)的一侧紧靠两根纵杆(3)的内侧;外横支组件(e)的两端均通过外铰接架(18)的底座及螺栓 船形螺母分别固定在两条腿杆(22)的中间部位;腿组件(c)由腿杆(22)、“u”型连接件(14)固定、万向关节组件(d)、磁吸组件(b)构成;腿杆(22)的上端通过内六角螺栓 螺母(16)与“u”型连接件(14)固定,“u”型连接件(14)的底部与万向关节组件(d)的下关节(21)相连;万向关节组件(d)由上关节(19)、中关节(20)、下关节(21)及两根芯轴构成,上关节(19)通过芯轴与中关节(20)相连,中关节通过芯轴与下关节(21)相连;上关节(19)亦连接一个“u”型连接件(14);磁吸组件(b)由电磁铁(10)、弹簧(11)、脚板(12)、“u”型连接件(14)构成;电磁铁(10)与脚板(12)之间内置两个根弹簧(11),并通过两个外六角螺栓(13)连接;“u”型连接件(14)的底部限位在脚板(12)底部中间的槽内;磁吸组件(b)通过“u”型连接件(14)与腿组件(c)腿杆(22)的下端相连,并通过内六角螺栓 螺母(16);外横支组件(e)由外横支杆(17)、“u”型连接件(14)、内铰接架(15)、外铰接架(18)构成;外横支杆(17)的两端分别通过内六角螺栓 螺母(16)固定一个“u”型连接件(14),每个“u”型连接件(14)的底部与一个内铰接架(15)相连,每个内铰接架(15)通过芯轴与一个外铰接架(18)铰接;所述的内腿框架组件是由四个平行四边形构成的正方体框架结构;每个平行四边形由主框架“井”字型内框的一个边、两条腿组件(c)、内横支组件(f)构成;两条腿组件(c)通过上端的“u”型连接件(14)、内六角螺栓 螺母(16)固定在主框架组件内框的纵杆(3)两侧,且“u”型连接件(14)的一侧紧靠两根短横杆(4)的外侧;内横支组件(f)的两端均通过外铰接架(18)的底座及螺栓 船形螺母分别固定在两条腿杆(22)的中间部位;内横支组件(f)的内横支杆(5)与外横支组件(e)的外横支杆(17)长度不同,其它结构及连接方式与外横支组件(e)完全相同;所述的舵机组件(a)由舵机(8)、上“u”型架(7)、下“u”型架(9)构成;舵机(8)为双输出轴结构,上“u”型架(7)与舵机(8)的两个输出轴相连,下“u”型架(9)通过螺钉与舵机(8)本体下端固定;八组舵机组件(a)的上“u”型架(7)底部分别通过螺钉 船形螺母固定在八个平
行四边形的主框架边的中间部位,八组舵机组件(a)的下“u”型架(9)的分别通过螺钉 船形螺母 辅助“l”型连接件(6)固定在八个平行四边形的横支边的中间部位。
技术总结
本发明涉及一种钢质竖直壁面纵横爬行的机器人结构,机器人结构由主框架组件、外腿框架组件、内腿框架组件、舵机组件构成。通过对机器人外/内腿框架组件的四个纵移平行四边形机构及四个横移平行四边形机构的变形控制,配合电磁铁的通断电控制,分别实现机器人的纵/横向移动。机器人处于工作状态是,其重心距离壁面最近,吸附最可靠,提高了机器人作业中的稳固性。机器人磁吸组件对有一定弧度的壁面具有一定的自适应性,机器人腿足式结构可跨越具有一定高度的障碍。通过机器人搭载检测、作业等相关设备和系统,可代替人工对船舶、海上平台等钢质竖直壁面进行监测或作业。等钢质竖直壁面进行监测或作业。等钢质竖直壁面进行监测或作业。
技术研发人员:张仕海 屈重年
受保护的技术使用者:天津职业技术师范大学(中国职业培训指导教师进修中心)
技术研发日:2022.10.14
技术公布日:2022/11/25
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。