1.本发明属于健身器材技术领域,涉及了一种基于体能肢体力量训练的多功能辅助设备。
背景技术:
2.肢体力量训练为体能训练的基础训练,为增加肢体力量训练的强度,一般采用负重训练,现有的训练设备负载一般使用哑铃片,更换哑铃片来调节负载大小,操作繁琐,哑铃片价格较高,提升投入成本,且哑铃片频繁更换,对器材磨损较大,且哑铃片质量定额,无法对负载无级调节,同时为减少哑铃片的更换频率,训练时直接较大负载的训练,导致无法有效热身,或忘记热身直接训练,对身体损伤较大,无法满足实际需求,且目前的训练设备针对性较强,功能单一,不能针对身体多部位进行训练。因此,有必要提供一种基于体能肢体力量训练的多功能辅助设备,以解决上述背景技术中提出的问题。
技术实现要素:
3.发明目的:本发明的目的在于提供了一种基于体能肢体力量训练的多功能辅助设备。
4.技术方案:本发明所述的一种基于体能肢体力量训练的多功能辅助设备,包括:
5.机架,承载训练设备;
6.座椅,设置在机架上,且角度可调节;
7.移动装置,固定在机架上,与座椅相对设置;
8.脚蹬板,固定在移动装置上;
9.调节装置,对称部分设置有两个,固定在移动装置的两侧。
10.进一步的,所述移动装置包括:
11.移动轨道,固定在机架上;辅助调节装置进行移动,进而带动脚蹬板进行移动,来调节人体坐在座椅时,脚蹬板所处的相对位置;
12.螺纹杆,对称分布设有两个,设置在移动轨道两侧,且与转动装置固定连接;
13.固定滑块,固定连接两侧调节装置,且与移动轨道可滑动连接,与螺纹杆螺纹连接,在转动装置的带动下,螺纹杆进行转动,进而固定滑块带动调节装置在螺纹杆上进行移动,进而带动调节装置进行移动,来调节脚蹬板和座椅之间的位置关系;
14.移动滑块,与两侧调节装置可滑动连接,与脚蹬板固定连接,且与移动轨道和螺纹杆可滑动连接,当脚蹬板受力进行移动时,带动移动滑块在移动轨道和螺纹杆上移动,同时在两侧调节装置的侧壁上进行滑动。
15.进一步的,所述调节装置包括:
16.固定壳体,与固定滑块固定连接,与移动滑块可滑动连接,当固定滑块进行移动时,带动固定壳体进行同步移动,当移动滑块进行移动时,固定壳体保持固定状态;
17.限位组件,设置在固定壳体内部;
18.压缩组件,位于固定壳体内部,固定在限位组件上;
19.拉力组件,固定在压缩组件上。
20.进一步的,所述限位组件包括:
21.限位柱体,对称分布设有两个,且两端固定在固定壳体的内壁上;
22.移动挡板,可滑动设置在限位柱体之间,与移动滑块固定连接,当移动滑块进行移动时,带动移动挡板进行移动,进而对压缩组件进行压缩;
23.固定挡板,固定在限位柱体之间,与移动挡板相对设置,对压缩组件进行位置限定;
24.伸缩轴,穿过固定壳体和移动挡板,一端固定在压缩组件内;
25.限位螺母,与伸缩轴螺纹连接,在固定壳体的作用下,通过转动限位螺母,进而带动伸缩轴在固定壳体内移动,进而带动压缩组件进行压缩,进而对该设备的负载进行调节。
26.进一步的,所述压缩组件包括:
27.限位条,环形分布设有多个,固定在固定挡板底部;
28.移动件一,可滑动设置在限位条上,且位于固定挡板所在的一端;
29.移动件二,可滑动设置在限位条上,且位于移动挡板所在的一端;
30.弹性件,可滑动设置在伸缩轴上,两端分别与移动件一和移动件二固定连接,,当移动滑块带动移动挡板进行移动时,进而带动移动件二对弹性件进行压缩,借助弹性件的反弹力来对腿部力量进行训练。
31.进一步的,所述伸缩轴为中空结构,且所述拉力组件穿过伸缩轴与压缩组件中的移动件一固定连接,当拉动拉力组件时,在伸缩轴的作用下,移动件一对弹性件进行压缩,借助弹性件的反弹力来对手臂力量进行训练。
32.进一步的,所述伸缩轴的固定轴穿过固定壳体,与移动挡板和移动件二可滑动连接,且所述固定轴上设有与限位螺母相对应的螺纹,通过转动限位螺母带动伸缩轴进行移动,进而带动移动件一向移动件二进行移动,进而对弹性件进行压缩,来调节弹性件的反弹力,即该设备的负载值;
33.所述伸缩轴的伸出轴固定在移动件一上,当进行手臂力量训练时,在拉力组件的作用下,拉动时,伸出轴收缩,移动件一向移动件二移动,放松时,在弹性件的作用下,拉力组件和移动件一快速复位,多次重复进行训练。
34.进一步的,所述拉力组件包括:
35.链条,穿过伸缩轴与移动件一固定连接;
36.拉环,固定在链条上,位于伸缩轴外部,由手握进行拉动,来带动链条在伸缩轴内移动,带动移动件一对弹性件进行压缩。
37.有益效果:本发明与现有技术相比,本发明的特点是:1)、本发明中,通过限位组件和压缩组件的设置,通过对同一压缩组件进行不同方向的压缩,来对手臂和腿部进行训练,在移动装置的辅助下,针对不同体格的人群进行位置调节,以保持最佳的运动姿势,防止对人体造成损伤;2)、本发明中,通过限位螺母和伸缩轴的设置,根据训练所需负载对弹性件进行压缩调节,通过改变弹性件反弹力的大小来改变负载,进而实现对负载的无级调节。
附图说明
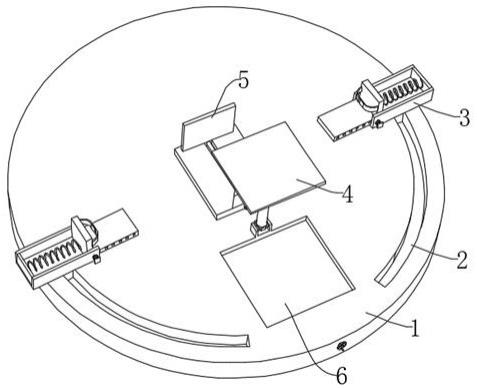
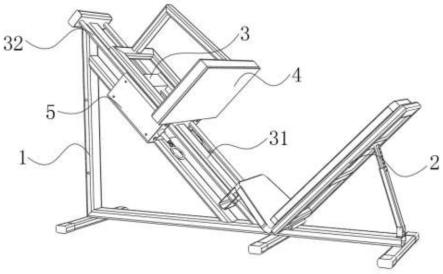
38.图1是本发明的整体结构示意图;
39.图2是本发明中移动装置结构示意图;
40.图3是本发明中调节装置结构示意图;
41.图中:1、机架;2、座椅;3、移动装置;4、脚蹬板;5、调节装置;31、移动轨道;32、螺纹杆;33、固定滑块;34、移动滑块;51、固定壳体;52、限位组件;53、压缩组件;54、拉力组件;521、限位柱体;522、移动挡板;523、固定挡板;524、伸缩轴;525、限位螺母;531、限位条;532、移动件一;533、移动件二;534、弹性件;541、链条;542、拉环。
具体实施方式
42.为了更清楚地说明本发明的技术方案,下面结合附图对本发明的技术方案做进一步的详细说明:
43.图1~3,本发明实施例中,一种基于体能肢体力量训练的多功能辅助设备,包括:
44.机架1,承载训练设备;
45.座椅2,设置在机架1上,且角度可调节;
46.移动装置3,固定在机架1上,与座椅2相对设置;
47.脚蹬板4,固定在移动装置3上;
48.调节装置5,对称部分设置有两个,固定在移动装置3的两侧。
49.本实施例中,所述移动装置3包括:
50.移动轨道31,固定在机架1上,辅助调节装置5进行移动,进而带动脚蹬板4进行移动,来调节人体坐在座椅2时,脚蹬板4所处的相对位置;
51.螺纹杆32,对称分布设有两个,设置在移动轨道31两侧,且与转动装置固定连接;
52.固定滑块33,固定连接两侧调节装置5,且与移动轨道31可滑动连接,与螺纹杆32螺纹连接,在转动装置的带动下,螺纹杆32进行转动,进而固定滑块 33带动调节装置5在螺纹杆32上进行移动,进而带动调节装置5进行移动,来调节脚蹬板4和座椅2之间的位置关系;
53.移动滑块34,与两侧调节装置5可滑动连接,与脚蹬板4固定连接,且与移动轨道31和螺纹杆32可滑动连接,当脚蹬板4受力进行移动时,带动移动滑块34在移动轨道31和螺纹杆32上移动,同时在两侧调节装置5的侧壁上进行滑动。
54.本实施例中,所述调节装置5包括:
55.固定壳体51,与固定滑块33固定连接,与移动滑块34可滑动连接,当固定滑块33进行移动时,带动固定壳体51进行同步移动,当移动滑块34进行移动时,固定壳体51保持固定状态;
56.限位组件52,设置在固定壳体51内部;
57.压缩组件53,位于固定壳体51内部,固定在限位组件52上;
58.拉力组件54,固定在压缩组件53上。
59.本实施例中,所述限位组件52包括:
60.限位柱体521,对称分布设有两个,且两端固定在固定壳体51的内壁上;
61.移动挡板522,可滑动设置在限位柱体521之间,与移动滑块34固定连接,当移动滑
块34进行移动时,带动移动挡板522进行移动,进而对压缩组件53 进行压缩;
62.固定挡板523,固定在限位柱体521之间,与移动挡板522相对设置,对压缩组件53进行位置限定;
63.伸缩轴524,穿过固定壳体51和移动挡板522,一端固定在压缩组件53内;
64.限位螺母525,与伸缩轴524螺纹连接,在固定壳体51的作用下,通过转动限位螺母525,进而带动伸缩轴524在固定壳体51内移动,进而带动压缩组件53进行压缩,进而对该设备的负载进行调节。
65.本实施例中,所述压缩组件53包括:
66.限位条531,环形分布设有多个,固定在固定挡板523底部;
67.移动件一532,可滑动设置在限位条531上,且位于固定挡板523所在的一端;
68.移动件二533,可滑动设置在限位条531上,且位于移动挡板522所在的一端;
69.弹性件534,可滑动设置在伸缩轴524上,两端分别与移动件一532和移动件二533固定连接,当移动滑块34带动移动挡板522进行移动时,进而带动移动件二533对弹性件534进行压缩,借助弹性件534的反弹力来对腿部力量进行训练。
70.本实施例中,所述伸缩轴524为中空结构,且所述拉力组件54穿过伸缩轴 524与压缩组件53中的移动件一532固定连接,当拉动拉力组件54时,在伸缩轴524的作用下,移动件一532对弹性件534进行压缩,借助弹性件534的反弹力来对手臂力量进行训练。
71.本实施例中,所述伸缩轴524的固定轴穿过固定壳体51,与移动挡板522 和移动件二533可滑动连接,且所述固定轴上设有与限位螺母525相对应的螺纹,通过转动限位螺母525带动伸缩轴524进行移动,进而带动移动件一532向移动件二533进行移动,进而对弹性件534进行压缩,来调节弹性件534的反弹力,即该设备的负载值;所述伸缩轴524的伸出轴固定在移动件一532上,当进行手臂力量训练时,在拉力组件54的作用下,拉动时,伸出轴收缩,移动件一532 向移动件二533移动,放松时,在弹性件534的作用下,拉力组件54和移动件一532快速复位,多次重复进行训练。
72.本实施例中,所述拉力组件54包括:
73.链条541,穿过伸缩轴524与移动件一532固定连接;
74.拉环542,固定在链条541上,位于伸缩轴524外部,由手握进行拉动,来带动链条541在伸缩轴524内移动,带动移动件一532对弹性件534进行压缩。
75.具体实施时,首先针对腿部进行训练时,通过转动装置带动螺纹杆32进行转动,对脚蹬板4的位置进行调节,使之与座椅2位置适合使用者,进而通过转动限位螺母525带动伸缩轴524进行移动,进而带动移动件一532进行移动,进而调节移动件一532和移动件二533之间间距,进而确定弹性件534的初始压缩值,移动件一532和移动件二533之间间距越近,弹性件534的反弹力越大,即对弹性件534再次进行压缩所需的力越大,在调节完毕后,通过腿部伸直,带动脚蹬板4进行移动,进而移动滑块34带动移动挡板522进行移动,进而带动移动件二533在限位柱体521上移动,对弹性件534进行压缩,在腿部收回后,弹性件534带动移动件二533快速复位,在多次对弹性件534进行压缩的过程中,达到对腿部训练的效果;针对手臂进行训练时,通过转动装置带动螺纹杆32进行转动,对脚蹬板4的位置进行调节,使使用者坐在座椅2上,腿部与脚蹬板4 接触,且保持伸直状态,进而通过转动限位螺母525带动伸缩轴524进行移动,确定弹性件534的初始压缩值,在调节完毕后,在手臂力量作用下,拉
动拉环 542带动链条541进行移动,进而带动伸缩轴524进行收缩,移动件一532对弹性件534进行压缩,通过多次拉动与放回,借助弹性件534的反弹力来对手臂力量进行训练,此设备亦可由腿部进行支撑,再由手臂进行拉动,同时带动移动件一532和移动件二533对弹性件534进行压缩,达到肢体力量训练的效果。
76.以上仅是本发明的优选实施方式,本发明的保护范围并不仅局限于上述实施例,凡属于本发明思路下的技术方案均属于本发明的保护范围。应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理前提下的若干改进和润饰,应视为本发明的保护范围。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。