1.本公开涉及搭载于车辆的管理器、系统、控制方法、非暂时性存储介质以及车辆。
背景技术:
2.近年来,实现驾驶辅助功能(自动驾驶、自动驻车等)的多个应用程序被安装于车辆。在日本特开2020-032894中公开了一种如下所述的控制装置(管理器):分别受理从这些多个应用程序输出的请求,对从该多个应用程序受理到的多个请求进行协调,基于该协调结果来输出用于对搭载于车辆的促动器系统(转向装置、制动装置等)进行驱动的请求。
3.安装于车辆的应用程序中存在多个请求使车辆的轨道追随于目标轨道的行动计划的高级驾驶辅助应用程序(adas(advanced driver assistance system)应用程序)。在这样的adas应用程序中,为了吸收因车辆的特性、搭载于车辆的促动器系统的差异等而产生的误差、干扰来使之最佳化,可考虑反馈输入促动器系统的状态而反映至行动计划。
4.然而,在形成为adas应用程序始终关注促动器系统的状态(故障等)来请求行动计划的系统结构的情况下,存在安装adas应用程序的电子控制单元(ecu:electronic control unit)、接口(i/f)的设计变繁琐的担忧。
技术实现要素:
5.本公开提供能够与搭载于车辆的促动器系统的状态无关地受理由adas应用程序请求的行动计划来实施适宜的运动请求的分配的管理器、系统、控制方法、非暂时性存储介质以及车辆。
6.本公开的第一方式是搭载于车辆的管理器。上述管理器包括1个以上的处理器,该1个以上的处理器构成为:从多个adas应用程序受理多个行动计划,对多个行动计划进行协调,无论包括具有转向促动器的转向系统在内的多个促动器系统中的故障的有无,均基于上述多个行动计划的协调结果来计算运动请求,根据上述促动器系统中的故障的内容来将运动请求分配给上述促动器系统的至少1个。
7.在上述第一方式中,上述1个以上的处理器可以受理上述adas应用程序为了将当前的车辆的轨道修正为目标轨道所需的曲率作为上述行动计划。
8.在上述第一方式中,上述1个以上的处理器可以仅将上述多个促动器系统中的未发生故障的促动器系统仅作为对象来分配上述运动请求。
9.在上述第一方式中,在上述1个以上的处理器分配上述运动请求的上述多个促动器系统中,上述转向系统可以冗余地构成。
10.本公开的第二方式是被搭载于车辆的系统。上述系统包括:多个adas应用程序,构成为分别输出用于将现状的车辆的轨道修正为目标轨道的曲率;多个促动器系统,至少包括冗余地构成的转向促动器的转向系统;以及管理器,包括1个以上的处理器,该1个以上的处理器构成为从上述多个adas应用程序受理多个上述曲率,对上述多个曲率进行协调,无论上述促动器系统中的故障的有无,均基于上述多个曲率的协调结果来计算运动请求,根
据上述促动器系统中的故障的内容来将上述运动请求分配给上述多个促动器系统的至少1个。
11.本公开的第三方式是由具备存储器和1个以上的处理器并被搭载于车辆的管理器的计算机执行的控制方法。上述控制方法包括:从多个adas应用程序受理多个行动计划;对上述多个行动计划进行协调;无论包括具有转向促动器的转向系统在内的多个促动器系统中的故障的有无,均基于上述多个行动计划的协调结果来计算运动请求;以及根据上述促动器系统中的故障的内容来将上述运动请求分配给上述促动器系统的至少1个。
12.本公开的第四方式是非暂时性存储介质,储存有能够由具备存储器和1个以上的处理器并被搭载于车辆的管理器的计算机执行且使上述计算机执行功能的命令。上述功能包括:从多个adas应用程序受理多个行动计划;对上述多个行动计划进行协调;无论包括具有转向促动器的转向系统在内的多个促动器系统中的故障的有无,均基于上述多个行动计划的协调结果来计算运动请求;以及根据上述促动器系统中的故障的内容来将上述运动请求分配给上述促动器系统的至少1个。
13.本公开的第五方式是搭载有上述管理器的车辆。
14.根据本公开的各方式,能够不关注搭载于车辆的促动器系统的状态(故障等)地adas应用程序对于管理器请求一如往常的行动计划,管理器基于协调后的行动计划来实施与促动器系统的状态对应的适宜的运动请求的分配。
附图说明
15.以下,参照附图对本发明的示例性实施例的特征、优点、技术及工业重要性进行说明,在附图中相同的附图标记表示相同的构成要素,其中:
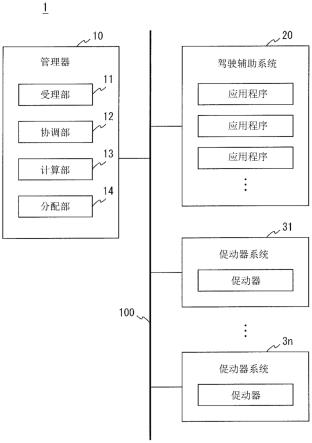
16.图1是表示本公开的一个实施方式所涉及的系统的构成例的简图。
17.图2是表示管理器所执行的处理的步骤的流程图。
18.图3是对由管理器执行的运动请求分配的具体例进行说明的图。
19.图4是对由管理器执行的运动请求分配的具体例进行说明的图。
具体实施方式
20.在促动器系统产生了故障等不良状况的情况下,本公开的管理器通过将分配给该发生了故障的促动器系统的运动请求量分配给其他促动器系统来实现与行动计划对应的运动请求。
21.以下,参照附图对本公开的一个实施方式详细地进行说明。
22.实施方式
23.构成
24.图1是表示本公开的一个实施方式所涉及的搭载于车辆的系统的构成例的简图。图1所例示的车辆系统1具备管理器10、驾驶辅助系统20以及多个促动器系统31~3n(n为2以上的整数)。车辆系统1所具备的各构成连接为可经由车载网络100通信。车载网络100能够例示can(controller area network)、以太网(注册商标)等。
25.驾驶辅助系统20是用于通过执行所安装的1个以上的应用程序来实现至少包括车辆的驱动控制以及制动控制的用于辅助车辆的驾驶的各种功能的构成。作为驾驶辅助系统
20所安装的应用程序,能够例示实现自动驾驶的功能的自动驾驶应用程序、实现自动驻车的功能的自动驻车应用程序、以及实现高级驾驶辅助的功能的adas应用程序等。adas应用程序中存在实现为了使车辆追随规定的目标轨道行驶而计算从当前的车辆轨道至目标轨道为止的修正轨道的功能的应用程序、实现碰撞规避辅助(pcs等)的功能的应用程序、实现在将与前行车的车间距离保持为恒定的同时进行行驶的前车追随行驶(acc等)的功能的应用程序、实现进行所行驶的车道的维持的车道维持辅助(lka、lta等)的功能的应用程序、实现为了使碰撞的损害减少而自动地施加制动的碰撞损害减少制动(aeb等)的功能的应用程序、警告车辆脱离行驶车道的车道脱离警报(ldw、lda等)的功能的应用程序等。
26.驾驶辅助系统20的各应用程序基于从未图示的各种传感器等取得(输入)的车辆的信息(识别传感器信息等)来将保证了应用程序独立的功能性(商品性)的行动计划的请求作为应用程序的请求分别输出至管理器10。该行动计划中包括使车辆产生的前后加速度/减速度、曲率等请求。另外,驾驶辅助系统20的各应用程序能够将可唯一地确定自身的应用程序的识别信息(应用id)与行动计划一同分别输出至管理器10。该应用id按每个应用程序被预先唯一确定。
27.该驾驶辅助系统20由具有cpu等处理器、存储器以及输入输出接口的电子控制单元(ecu)等计算机实现。其中,构成驾驶辅助系统20的ecu的数量、ecu所安装的应用程序的数量不特别限定。另外,作为驾驶辅助系统20,可以按每个应用程序设置各个ecu。例如,可以由安装有自动驾驶应用程序的自动驾驶ecu、安装有自动驻车应用程序的自动驻车ecu、以及安装有高级驾驶辅助应用程序的adas-ecu来构成驾驶辅助系统20。另外,可以如安装有实现acc功能的adas应用程序的ecu、安装有实现lka功能的adas应用程序的ecu、以及安装有实现aeb功能的adas应用程序的ecu那样多个adas应用程序被安装于多个ecu。
28.多个促动器系统31~3n是用于实现驾驶辅助系统20所输出的行动计划的请求的实现系统之一。作为促动器系统31~3n的一个例子,存在包括能够使转向轴产生对方向盘的转向操纵进行辅助的转矩的转向促动器(eps马达等)并通过控制该转向促动器的动作来实现行动计划的请求的一部分或者全部的电动助力转向(eps:electric power steering)系统。从故障安全防护的观点考虑,该eps系统被冗余化为具备2个(主与副)相同的结构,以便即使在产生了故障等不良状况时也能够继续转向操纵控制。另外,作为促动器系统31~3n的一个例子,存在包括能够使车辆产生制动力的制动促动器(液压制动器等)并通过控制该制动促动器的动作来实现行动计划的请求的一部分或者全部的电动制动系统(ebs:electronic brake system)。该ebs也可以冗余地构成。另外,作为促动器系统31~3n的一个例子,存在包括能够使后轮在车宽方向转向的促动器并通过控制该促动器的动作来实现行动计划的请求的一部分或者全部的后轮转向操纵(drs:dynamic rear steering)系统。另外,作为促动器系统31~3n的一个例子,存在包括能够使车辆产生制动驱动力的促动器(ev/hv马达等)并通过控制该促动器的动作来实现行动计划的请求的一部分或者全部的系统。进而,作为促动器系统31~3n的一个例子,还能够举出根据路面的凹凸等车辆变化来使减震器的衰减力最佳化的衰减力可变减振悬挂系统(avs:adaptive variable suspension system)、抑制车身的侧倾的主动稳定器系统等。
29.管理器10基于从驾驶辅助系统20受理的行动计划的请求来决定与车辆的运动相关的控制内容,基于该决定出的控制内容来对于多个促动器系统31~3n输出所需的请求。
此时,管理器10基于从多个促动器系统31~3n分别反馈输入的系统的状态(可用性、与故障相关的信息等)来对于促动器系统31~3n中的1个或者多个进行运动请求的分配。
30.该管理器10作为所谓的与车辆的运动相关的adas-mgr、vehicle-mgr等、或作为adas-mgr、vehicle-mgr的一部分来发挥功能,控制车辆的活动。管理器10包括受理部11、协调部12、计算部13以及分配部14。
31.受理部11受理驾驶辅助系统20的多个应用程序所输出的行动计划的请求。作为本实施方式中的行动计划,能够例示与车辆的横向运动相关的修正轨道的曲率。受理部11受理到的行动计划的请求被输出至协调部12。
32.协调部12对受理部11从驾驶辅助系统20的各应用程序受理到的多个行动计划的请求进行协调。作为该协调的处理,能够例示基于规定的选择基准(例如min选择)来从多个行动计划之中选择1个行动计划。另外,作为其他协调处理,还能够基于多个行动计划来设定新的行动计划。
33.计算部13基于协调部12中的行动计划的请求的协调结果来计算运动请求。该运动请求是请求用于实现被协调后的行动计划的车辆的活动的物理量,与行动计划的请求的物理量不同。例如,在行动计划为曲率的情况下,计算用于追随该曲率的车辆的横摆力矩、横摆率作为运动请求。
34.分配部14基于多个促动器系统31~3n的状态来将由计算部13计算出的运动请求恰当地分配给1个以上的促动器。在该分配时,可以变换为适宜于分配目标的促动器系统的物理量的指令值等。
35.例如,在向eps的促动器系统分配运动请求的情况下,车辆的横摆力矩/横摆率被变换为方向盘的转向操纵角的指令值。在向drs的促动器系统分配运动请求的情况下,车辆的横摆力矩/横摆率被变换为后轮的转向角的指令值。在向avs/主动稳定器的促动器系统分配运动请求的情况下,车辆的横摆力矩/横摆率被变换为与侧倾刚性相关的指令值。在向ebs的促动器系统分配运动请求的情况下,车辆的横摆力矩/横摆率被变换为各车轮的制动力(带符号的驱动力)、减速度的指令值。在向电动车中的驱动用马达的促动器系统分配运动请求的情况下,车辆的横摆力矩/横摆率被变换为各车轮的驱动力的指令值。这些物理量的变换能够基于根据车辆的特性、搭载于车辆的促动器的变更等而按每个车辆预先决定的车辆模型来实施。其中,变换处理可以由分配部14进行,也可以由设置于分配部14的后段的管理器10的其他结构(未图示)进行,也可以在各促动器系统31~3n中进行。
36.其中,以上说明的搭载于车辆的管理器10、驾驶辅助系统20以及多个促动器系统31~3n的结构是一个例子,能够适当地追加、置换、变更、省略等。另外,各设备的功能能够适当地集成为1个设备或分散为多个设备来安装。
37.控制
38.进而参照图2对本实施方式所涉及的管理器10执行的控制进行说明。图2是对管理器10所执行的处理的步骤进行说明的流程图。在管理器10的受理部11从驾驶辅助系统20的应用程序受理到行动计划的请求的情况下,开始该图2所示的处理。
39.(步骤s201)
40.协调部12对受理部11从应用程序受理到的1个或者多个行动计划实施协调。作为行动计划,能够例示曲率。作为协调处理,能够例示采取全部的行动计划中的请求最小值的
行动计划的手法。若受理部11从应用程序受理到的行动计划为1个,则该行动计划作为协调结果被协调部12采取。若实施了行动计划的协调,则处理进入至步骤s202。
41.(步骤s202)
42.计算部13基于协调部12的协调结果来计算运动请求。在行动计划为曲率的情况下,能够例示目标横摆力矩/横摆率作为运动请求。该计算出的运动请求作为分配给多个促动器系统31~3n的至少1个的运动请求被输出至管理器10的分配部14。若计算出运动请求,则处理进入至步骤s203。
43.(步骤s203)
44.分配部14对搭载于车辆的促动器系统31~3n之中是否存在发生了故障的促动器系统进行判断。该判断能够基于从多个促动器系统31~3n反馈的系统状态来实现。当存在发生了故障的促动器系统的情况下(步骤s203,是),处理进入至步骤s204,当不存在发生故障的促动器系统的情况下(步骤s203,否),处理进入至步骤s205。
45.(步骤s204)
46.分配部14仅将未发生故障的促动器系统作为对象来实施运动请求的适宜的分配。若实施了运动请求的分配,则本管理器10的处理结束。
47.(步骤s205)
48.分配部14将全部的促动器系统作为对象来实施运动请求的适宜的分配。若实施了运动请求的分配,则本管理器10的处理结束。
49.分配的具体例
50.参照图3以及图4对由管理器10执行的运动请求分配的具体例进行说明。该图3以及图4是示出了在从计算用于使车辆追随目标轨道行驶的修正轨道的应用程序(轨道修正fb应用)请求了修正轨道的曲率作为行动计划的情况下管理器10对于所需的促动器适宜地分配物理量的运动请求的样子的一个例子。作为与车辆的横向运动的控制相关的系统,在促动器中例示了冗余地构成的2个eps所使用的主马达和副马达、drs、avs/主动稳定器、ebs所使用的制动器、以及ehv系统所使用的驱动用马达。
51.图3是管理器10将全部的促动器系统作为对象来实施运动请求(目标横摆力矩/横摆率)的分配(图2,步骤s205)的例子。在该图3的例子中,由于主eps系统以及副eps系统均不存在故障等不良状况,能够利用这些eps系统实现来自轨道修正fb应用的行动计划的全部,所以管理器10将运动请求变换为面向主eps系统以及副eps系统的转向操纵角而进行分配。这里,还可考虑运动请求的全部(100%输出)仅由主或副的任一方的eps系统供给。然而,在这样进行分配的情况下,由于需要主eps系统与副eps系统双方具备分别能够实现100%输出的大型马达,所以在搭载空间、成本的方面存在课题。在本实施方式的例子中,通过利用主eps系统供给50%输出且利用副eps系统供给50%输出,构成为通过双方的eps系统的总合获得100%输出。
52.图4是管理器10仅将未发生故障的促动器系统作为对象来实施运动请求(目标横摆力矩/横摆率)的分配(图2,步骤s204)的例子。在该图4的例子中,由于副eps系统发生故障,利用主eps系统仅能够实现来自轨道修正fb应用的行动计划的50%,所以管理器10将运动请求不仅分配给主eps系统、还分配给其他促动器系统。对于管理器10而言,例如在分配给drs的情况下将运动请求变换为后轮转向角指令值,在分配给avs/主动稳定器的情况下
将运动请求变换为侧倾刚性指令值。另外,对于管理器10而言,在分配给制动器的情况下将运动请求变换为减速度指令值,在分配给驱动用马达的情况下将运动请求变换为驱动力指令值。由此,能够使用其他促动器系统来实现副eps系统应该实现的行动计划的50%的全部或者一部分。
53.作用/效果
54.如以上那样,在本公开的一个实施方式所涉及的车辆系统中,当在促动器系统中产生了故障等不良状况的情况下,能够将分配给该发生了故障的促动器系统的运动请求量分配给其他促动器系统。由此,即便不向驾驶辅助系统的各应用程序通知促动器系统的故障、限制、或请求轨道修正,也能够实现与行动计划对应的运动请求。即,由于驾驶辅助系统的各应用程序能够不关注搭载于车辆的促动器系统的状态而对于管理器请求一如往常的行动计划,所以能够避免安装应用程序的电子控制单元(ecu)、接口(i/f)的设计复杂化。
55.另外,在本公开的一个实施方式所涉及的车辆系统中,通过从驾驶辅助系统的各应用程序受理曲率,能够对于以转向操纵角进行控制的eps系统以外的促动器系统也分配运动请求。因此,即使冗余地构成的eps系统的一方发生故障,也能够通过另一方的eps系统与其他促动器系统的配合来实现行动计划的请求。
56.此外,冗余地搭载于车辆的eps系统、ebs系统等可以构成为在主系统与副系统中所利用的蓄电池、电源供给的系统、以及/或者通信控制的系统分离。通过这样构成,即便在促动器系统以外的任一方的系统发生了不良状况的情况下,也能够通过另一方的系统来使车辆控制继续。
57.以上,对本公开技术的一个实施方式进行了说明,但本公开不仅能够理解为搭载于车辆的管理器,还能够理解为电子控制单元、包括电子控制单元和管理器的系统、具备存储器和1个以上的处理器的管理器所执行的控制方法、控制程序、存储有控制程序的计算机可读取的非暂时性存储介质、或具备管理器的车辆等。
58.本公开在搭载于车辆等的管理器等中是有用的。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。