1.本实用新型涉及机器人焊接工作站技术领域,特别是涉及一种整体式机器人侧置焊接工作站。
背景技术:
2.机器人焊接工作站主要由焊接机器人和变位机组成,变位机用于将待焊工件翻转至理想位置,配合焊接机器人完成焊接。
3.现有的采用三轴水平变位机的焊接工作站结构不合理,焊接机器人中置于三轴水平变位机上一起回转,送丝和电缆走线复杂,送丝稳定性差,防弧板防弧效果差。
技术实现要素:
4.为解决上述问题,本实用新型提供一种整体式机器人侧置焊接工作站。
5.具体地,本实用新型的技术方案是:
6.一种整体式机器人侧置焊接工作站,包括焊接工房、焊接机器人和三轴水平变位机,三轴水平变位机包括回转架、两个工装轴驱动箱、两个工装轴从动箱和两个工装框架,工装轴驱动箱和工装轴从动箱固定在回转架上,工装轴驱动箱用于驱动工装框架转动,焊接工房内设有底座,三轴水平变位机和焊接机器人分别固定在底座上;焊接工房包括工房主体,回转架能在第一位置和第二位置之间转动切换,使工装框架在工房主体内和工房主体外之间变位,回转架上立设有防弧板,工房主体的一侧设有让位口,回转架位于第一位置和第二位置时,防弧板与让位口拼合。
7.优选地,所述整体式机器人侧置焊接工作站还包括机器人抬高座,机器人抬高座以可拆卸的方式固定在底座上,焊接机器人以可拆卸的方式固定在机器人抬高座上。
8.优选地,定义设有让位口的一侧为工房主体的前侧,焊接机器人设在工房主体后部,工房主体的左侧、右侧或后侧设有检修门。
9.优选地,工房主体内还设有电缆平衡吊和送丝机,焊接机器人上设有辅助送丝机,电缆平衡吊吊设在工房主体的房顶上,送丝机固定在工房主体的后侧壁上。
10.优选地,焊接工房后方设有除尘装置、辅助放置架和电控柜,辅助放置架上设有焊机和机器人控制柜,工房主体的房顶上设有除尘口。
11.优选地,焊接工房还包括防护围栏,防护围栏与工房主体连接,在工房主体前方围成上下件区域,防护围栏的前侧开放设置,防护围栏上对应于三轴水平变位机设有安全光栅。
12.本实用新型的有益技术效果:
13.焊接机器人和三轴水平变位机分别固定在底座上,落地安装和调试方便,焊接机器人布置于三轴水平变位机侧方,送丝和电缆走线方便,送丝稳定。回转架位于第一位置和第二位置时,防弧板和工房主体的配合保证了工房主体外人员的安全,焊接机器人对位于工房主体内的工装框架上的工件进行焊接的同时,工房主体外的人员对位于工房主体外的
工装框架进行上件和下件,效率高。
附图说明
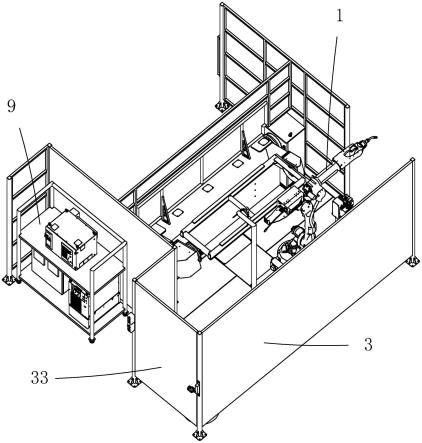
14.图1为一种整体式机器人侧置焊接工作站的结构图;
15.图2为图1所示焊接工房的结构图;
16.图3为图1所示整体式机器人侧置焊接工作站隐藏焊接工房的结构图。
具体实施方式
17.下面结合附图及具体实施例对本实用新型作进一步详细说明。
18.如图1至3所示,一种整体式机器人侧置焊接工作站,包括焊接工房、焊接机器人2和三轴水平变位机,三轴水平变位机包括回转架31、两个工装轴驱动箱32、两个工装轴从动箱33和两个工装框架(未示出),工装轴驱动箱32和工装轴从动箱33固定在回转架31上,工装轴驱动箱32用于驱动工装框架转动,焊接工房内设有底座4,三轴水平变位机和焊接机器人2分别固定在底座4上;焊接工房包括工房主体11,回转架31能在第一位置和第二位置之间转动切换,使工装框架在工房主体11内和工房主体11外之间变位,两个工装框架交替靠近位于变位机侧方的焊接机器人2。回转架31上立设有防弧板34,工房主体11的一侧设有让位口110,回转架31位于第一位置和第二位置时,防弧板34与让位口110拼合(如图1所示),防弧效果好。
19.焊接机器人2和三轴水平变位机分别固定在底座4上,落地安装和调试方便,焊接机器人2布置于三轴水平变位机侧方,送丝和电缆走线方便,送丝稳定。回转架31位于第一位置和第二位置时,防弧板34和工房主体11的配合保证了工房主体11外人员的安全,焊接机器人2对位于工房主体11内的工装框架上的工件进行焊接的同时,工房主体11外的人员对位于工房主体11外的工装框架进行上件和下件,效率高。
20.底座4上设有机器人抬高座41,机器人抬高座41以可拆卸的方式固定在底座4上,焊接机器人2以可拆卸的方式固定在机器人抬高座41上,通过更换不同高度的机器人抬高座41,适配不同的焊接机器人2。
21.定义设有让位口110的一侧为工房主体11的前侧,焊接机器人2设在工房主体11后部,工房主体11的左侧设有检修门111,方便对焊接机器人2等工房主体11内的设备进行检修。在其它实施例中,根据需要,也可以将检修门111开设在工房主体11的右侧或后侧。
22.工房主体11内还设有电缆平衡吊5和送丝机6,焊接机器人2上设有辅助送丝机21,电缆平衡吊5吊设在工房主体11的房顶上,送丝机6固定在工房主体11的后侧壁上。焊接机器人2在动作时,其上连接的电缆被焊接机器人2牵拉,为避免拉断,电缆的长度需留有余地,采用电缆平衡吊5将电缆吊起,可以在保证电缆长度的同时,避免电缆干涉焊接机器人2动作。
23.焊接工房后方设有除尘装置7、辅助放置架8和电控柜9,辅助放置架8上设有焊机和机器人控制柜,工房主体11的房顶上设有除尘口112,除尘口112与除尘装置7通过管道(未示出)连接。焊机和机器人控制柜等设备放置于焊接工房外,调试和维护方便,焊接工房负载小,结构简单,成本低。
24.焊接工房还包括防护围栏12,防护围栏12与工房主体11连接,在工房主体11前方
围成上下件区域,防护围栏12的前侧开放设置,方便运送工件,防护围栏12上对应于三轴水平变位机设有安全光栅121,以保证人员安全。
25.工房主体11内,焊接机器人2的侧方设有清枪站101,清枪站101与变位机上的工件错开设置,避免干涉。
26.以上所述仅为本实用新型的较佳实施例,并非对本实用新型的限制。应当指出,本领域的技术人员在阅读完本说明书后,凡在本实用新型的精神和原则之内所做的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
技术特征:
1.一种整体式机器人侧置焊接工作站,包括焊接工房、焊接机器人和三轴水平变位机,三轴水平变位机包括回转架、两个工装轴驱动箱、两个工装轴从动箱和两个工装框架,工装轴驱动箱和工装轴从动箱固定在回转架上,工装轴驱动箱用于驱动工装框架转动,其特征在于:焊接工房内设有底座,三轴水平变位机和焊接机器人分别固定在底座上;焊接工房包括工房主体,回转架能在第一位置和第二位置之间转动切换,使工装框架在工房主体内和工房主体外之间变位,回转架上立设有防弧板,工房主体的一侧设有让位口,回转架位于第一位置和第二位置时,防弧板与让位口拼合。2.如权利要求1所述的整体式机器人侧置焊接工作站,其特征在于:还包括机器人抬高座,机器人抬高座以可拆卸的方式固定在底座上,焊接机器人以可拆卸的方式固定在机器人抬高座上。3.如权利要求1所述的整体式机器人侧置焊接工作站,其特征在于:定义设有让位口的一侧为工房主体的前侧,焊接机器人设在工房主体后部,工房主体的左侧、右侧或后侧设有检修门。4.如权利要求3所述的整体式机器人侧置焊接工作站,其特征在于:工房主体内还设有电缆平衡吊和送丝机,焊接机器人上设有辅助送丝机,电缆平衡吊吊设在工房主体的房顶上,送丝机固定在工房主体的后侧壁上。5.如权利要求3所述的整体式机器人侧置焊接工作站,其特征在于:焊接工房后方设有除尘装置、辅助放置架和电控柜,辅助放置架上设有焊机和机器人控制柜,工房主体的房顶上设有除尘口。6.如权利要求3所述的整体式机器人侧置焊接工作站,其特征在于:焊接工房还包括防护围栏,防护围栏与工房主体连接,在工房主体前方围成上下件区域,防护围栏的前侧开放设置,防护围栏上对应于三轴水平变位机设有安全光栅。
技术总结
本实用新型涉及机器人焊接工作站技术领域,特别是涉及一种整体式机器人侧置焊接工作站,包括焊接工房、焊接机器人和三轴水平变位机,焊接工房内设有底座,三轴水平变位机和焊接机器人分别固定在底座上;焊接工房包括工房主体,回转架能在第一位置和第二位置之间转动切换,使工装框架在工房主体内和工房主体外之间变位,回转架上立设有防弧板,工房主体的一侧设有让位口,回转架位于第一位置和第二位置时,防弧板与让位口拼合。焊接机器人和三轴水平变位机分别固定在底座上,落地安装和调试方便,焊接机器人布置于三轴水平变位机侧方,送丝和电缆走线方便,送丝稳定。送丝稳定。送丝稳定。
技术研发人员:樊友安 沈钦锋
受保护的技术使用者:厦门锋元机器人有限公司
技术研发日:2022.04.20
技术公布日:2022/11/21
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。