1.本实用新型属于穿梭车技术领域,尤其涉及一种结构紧凑的多功能智能穿梭机器人。
背景技术:
2.穿梭车在仓储物流设备中主要有两种形式:穿梭车式出入库系统和穿梭车式仓储系统,以往复或者回环方式,在固定轨道上运行的台车,将货物运送到指定地点或接驳设备。配备有智能感应系统,能自动记忆原点位置,自动减速系统。
3.目前,运送托盘和运动料箱使用的是不同类型的货架系统,因而只能使用两种结构不同的穿梭车,这使得穿梭车的通用性差,并且穿梭车投入数量多会大大地提高仓储系统的成本投入,另外,穿梭车使用的升降和驱动模块是分开的,这就需要多组不同的驱动系统,使得结构设计复杂,车身占据空间大。
技术实现要素:
4.本实用新型的目的在于:为了解决运送托盘和运动料箱使用的结构不同的穿梭车,穿梭车的升降和驱动模块分开设计,导致穿梭车通用性差、结构设计复杂、车身占据空间大的问题,而提出的一种结构紧凑的多功能智能穿梭机器人。
5.为了实现上述目的,本实用新型采用了如下技术方案:一种结构紧凑的多功能智能穿梭机器人,其包括车身、多个第一驱动轮、多个第二驱动轮、多组顶升涡轮机构、伸缩臂机构和两组驱动机构;
6.多组所述顶升涡轮机构分别设于所述车身的四个拐角处,多组所述顶升涡轮机构呈对称分布,相对称的两组所述顶升涡轮机构通过第一轴杆连接;
7.多个所述第一驱动轮呈对称分布在所述车身的相对两侧,相对称的两个所述第一驱动轮通过第二轴杆连接,所述第二轴杆穿过两组所述顶升涡轮机构,所述顶升涡轮机构驱动所述第二轴杆升降;
8.多个所述第二驱动轮呈对称分布在所述车身的相对两侧,所述第二驱动轮的轴心与所述第一驱动轮的轴心垂直,位于所述车身同一侧的两个所述第二驱动轮通过第三轴杆连接,所述第二驱动轮与所述第三轴杆的端部通过转向箱连接,所述转向箱安装在所述车身上;
9.两组驱动机构设于所述车身内,所述驱动机构连接所述第一轴杆、所述第二轴杆和所述第三轴杆,且所述驱动机构驱动所述第一轴杆转动、驱动所述第二轴杆转动和驱动所述第三轴杆转动;
10.所述伸缩臂机构设于所述车身上,且所述伸缩臂机构位于两组所述驱动机构之间。
11.作为上述技术方案的进一步描述:
12.所述第一轴杆、所述第二轴杆和所述第三轴杆之间相互平行。
13.作为上述技术方案的进一步描述:
14.所述驱动机构包括第一电机和两组电控离合器,所述第一电机固定安装在所述车身上,两组所述电控离合器安装在所述第一电机上,其中一组所述电控离合器通过同步带驱动所述第一轴杆转动,另一组所述电控离合器通过同步带驱动所述第二轴杆转动和驱动所述第三轴杆转动。
15.作为上述技术方案的进一步描述:
16.所述顶升涡轮机构包括箱体、蜗杆、涡轮本体、螺管、丝杆和升降板,所述箱体固定安装在车身上,所述蜗杆铰接在所述箱体内,且所述蜗杆与所述第一轴杆的端部连接,所述螺管铰接在所述箱体上,所述涡轮本体连接在所述螺管上,且所述涡轮本体与所述蜗杆啮合,所述升降板沿垂直方向滑动设于所述箱体内,所述丝杆固定连接在所述升降板上,且所述丝杆与所述螺管螺接,所述第二轴杆穿过所述升降板,且所述第二轴杆铰接在所述升降板上。
17.作为上述技术方案的进一步描述:
18.所述电控离合器通过同步带连接所述第三轴杆,所述车身上铰接有过渡轴,所述过渡轴通过同步带分别连接所述第二轴杆和所述第三轴杆,所述车身上设置有涨紧机构,所述涨紧机构抵住连接所述第二轴杆和所述过渡轴的同步带。
19.作为上述技术方案的进一步描述:
20.所述涨紧机构包括支架、张紧轮和扭簧,所述支架铰接在所述车身上,且所述支架位于所述过渡轴的上方,所述扭簧连接在所述支架上,且所述扭簧抵住所述车身,所述张紧轮铰接在所述支架的端部,且所述张紧轮抵住连接所述第二轴杆和所述过渡轴的同步带。
21.作为上述技术方案的进一步描述:
22.所述伸缩臂机构包括第二电机和取货臂本体,所述第二电机固定安装在所述车身内,所述取货臂本体滑动设于所述车身上,所述第二电机上设置有齿轮,所述取货臂本体上设置有齿条,所述齿轮与所述齿条啮合。
23.作为上述技术方案的进一步描述:
24.所述取货臂本体的顶面与所述车身顶面重合。
25.综上所述,由于采用了上述技术方案,本实用新型的有益效果是:
26.1、本实用新型中,通过驱动机构驱动第一驱动轮和第二驱动轮转动,驱动机构驱动顶升涡轮机构升降,使得车身具有四向运动和升降的功能,满足搬运料箱的使用需求,同时,在车身上设置有伸缩臂机构,在第二电机的作用下,取货臂本体沿着直线方向运动并从车身的一侧伸出,取货臂本体可以插入托盘内,从而满足搬运托盘的使用需求,使得穿梭车可以适用于不同的货架系统,通用性强。
27.2、本实用新型中,通过在第一电机上连接两组电控离合器,其中一组电控离合器与第一轴杆连接并驱动第一轴杆转动,第一轴杆转动对顶升涡轮机构具有驱动作用,驱动第二轴杆升降,从而带动第一驱动轮升降,使第一驱动轮抵住地面并使得车身整体得到抬升,另一组电控离合器驱动第二轴杆和第三轴杆转动,因而驱动第一驱动轮和第二驱动轮转动,结合第一驱动轮的升降,第一驱动轮和第二驱动轮交替地抵住地面,因而使得车身向四个方向运动,巧妙地将升降与驱动模块结合设计,只需要同一驱动源,大大地节省了传动结构在占据车身内部的空间,便于对车身整体结构进行精简紧凑化设计。
附图说明
28.图1为一种结构紧凑的多功能智能穿梭机器人的整体结构示意图。
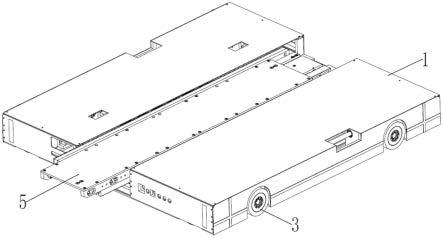
29.图2为一种结构紧凑的多功能智能穿梭机器人的使用状态参考图。
30.图3为一种结构紧凑的多功能智能穿梭机器人的内部结构示意图一。
31.图4为一种结构紧凑的多功能智能穿梭机器人的内部结构示意图二。
32.图5为图4中a部分的局部放大图。
33.图6为一种结构紧凑的多功能智能穿梭机器人的内部结构示意图三。
34.图7为图6中b部分的局部放大图。
35.图8为一种结构紧凑的多功能智能穿梭机器人的内部结构示意图四。
36.图9为图8中c部分的局部放大图。
37.图10为图8中d部分的局部放大图。
38.图11为一种结构紧凑的多功能智能穿梭机器人中伸缩臂机构的结构示意图。
39.图12为一种结构紧凑的多功能智能穿梭机器人中顶升涡轮机构的内部结构示意图一。
40.图13为一种结构紧凑的多功能智能穿梭机器人中顶升涡轮机构的内部结构示意图二。
41.图14为图13的使用状态参考图。
42.图15为一种结构紧凑的多功能智能穿梭机器人中转向箱的局部剖视图。
43.图16为一种结构紧凑的多功能智能穿梭机器人的控制框图。
44.图例说明:
45.1、车身;2、第一驱动轮;3、第二驱动轮;4、顶升涡轮机构;41、箱体;42、蜗杆;43、涡轮本体;44、螺管;45、丝杆;46、升降板;5、伸缩臂机构;51、第二电机;52、取货臂本体;6、驱动机构;61、第一电机;62、电控离合器;7、第一轴杆;8、第二轴杆;9、第三轴杆;10、转向箱;11、过渡轴;12、涨紧机构;121、支架;122、张紧轮;123、扭簧;13、齿轮;14、齿条。
具体实施方式
46.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其它实施例,都属于本实用新型保护的范围。
47.请参阅图1-16,本实用新型提供一种技术方案:一种结构紧凑的多功能智能穿梭机器人,包括车身1、4个第一驱动轮2、4个第二驱动轮3、4组顶升涡轮机构4、伸缩臂机构5和两组驱动机构6;
48.4组所述顶升涡轮机构4分别设于所述车身1的四个拐角处,4组所述顶升涡轮机构4呈两两对称分布,相对称的两组所述顶升涡轮机构4通过第一轴杆7连接;
49.4个所述第一驱动轮2呈两两对称分布在所述车身1的相对两侧,相对称的两个所述第一驱动轮2通过第二轴杆8连接,所述第二轴杆8穿过两组所述顶升涡轮机构4,所述顶升涡轮机构4驱动所述第二轴杆8升降;
50.4个所述第二驱动轮3呈两两对称分布在所述车身1的相对两侧,所述第二驱动轮3
的轴心与所述第一驱动轮2的轴心垂直,位于所述车身1同一侧的两个所述第二驱动轮3通过第三轴杆9连接,所述第二驱动轮3与所述第三轴杆9的端部通过转向箱10连接,所述转向箱10安装在所述车身1上;
51.两组驱动机构6设于所述车身1内,所述驱动机构6连接所述第一轴杆7、所述第二轴杆8和所述第三轴杆9,且所述驱动机构6驱动所述第一轴杆7转动、驱动所述第二轴杆8转动和驱动所述第三轴杆9转动;
52.所述伸缩臂机构5设于所述车身1上,且所述伸缩臂机构5位于两组所述驱动机构6之间;
53.所述第一轴杆7、所述第二轴杆8和所述第三轴杆9之间相互平行,便于传动稳定;
54.所述驱动机构6包括第一电机61和两组电控离合器62,所述第一电机61固定安装在所述车身1上,两组所述电控离合器62安装在所述第一电机61上,其中一组所述电控离合器62通过同步带驱动所述第一轴杆7转动,另一组所述电控离合器62通过同步带驱动所述第二轴杆8转动和驱动所述第三轴杆9转动,电控离合器62、第一轴杆7、第二轴杆8和第三轴杆9上都固定安装有相对应的带轮,带轮用于与同步带相连接,在第一电机61始终处于运转状态时,当其中一组电控离合器62关闭,另一组电控离合器62打开时,第二驱动轮3处于接触地面的状态,第二轴杆8和第三轴杆9处于转动状态,第一驱动轮2和第二驱动轮3均处于转动状态,此时,车身1在第二驱动轮3的驱动作用下运动,当两个电控离合器62均处于打开状态时,第一轴杆7、第二轴杆8和第三轴杆9均处于转动状态,顶升涡轮机构4在第一轴杆7的驱动作用下驱动第二轴杆8下降,第一驱动轮2随着第二轴杆8下降,第一驱动轮2代替第二驱动轮3接触地面,第一驱动轮2和第二驱动轮3均处于转动状态,此时,车身1在第一驱动轮2的驱动作用下运动,从而实现了四向运动,同时,车身1整体的高度也得到了抬升,传动结构设计巧妙,大大地节省了传动结构在占据车身1内部的空间,便于对车身1整体结构进行精简紧凑化设计;
55.所述顶升涡轮机构4包括箱体41、蜗杆42、涡轮本体43、螺管44、丝杆45和升降板46,所述箱体41固定安装在车身1上,所述蜗杆42铰接在所述箱体41内,且所述蜗杆42与所述第一轴杆7的端部连接,所述螺管44铰接在所述箱体41上,所述涡轮本体43连接在所述螺管44上,且所述涡轮本体43与所述蜗杆42啮合,所述升降板46沿垂直方向滑动设于所述箱体41内,所述丝杆45固定连接在所述升降板46上,且所述丝杆45与所述螺管44螺接,所述第二轴杆8穿过所述升降板46,且所述第二轴杆8铰接在所述升降板46上,第一轴杆7转动时带动蜗杆42转动,蜗杆42转动并驱动涡轮本体43转动,涡轮本体43转动带动螺管44转动,由于螺管44转动的过程中并不产生位置移动,螺接在螺管44上的丝杆45便发生移动,丝杆45自由度与其连接的升降板46一同释放,从而驱动升降板46沿所述箱体41内垂向滑动,升降板46的升降带动第二轴杆8的升降,利用涡轮和螺管44相结合的传动方式,使得传动效率高,升降过程平稳,传动效率高,避免了使用液压和链条传动时产生的噪声,降低了制造成本;
56.所述电控离合器62通过同步带连接所述第三轴杆9,所述车身1上铰接有过渡轴11,所述过渡轴11通过同步带分别连接所述第二轴杆8和所述第三轴杆9,所述车身1上设置有涨紧机构12,所述涨紧机构12抵住连接所述第二轴杆8和所述过渡轴11的同步带;所述涨紧机构12包括支架121、张紧轮122和扭簧123,所述支架121铰接在所述车身1上,且所述支架121位于所述过渡轴11的上方,所述扭簧123连接在所述支架121上,且所述扭簧123抵住
所述车身1,所述张紧轮122铰接在所述支架121的端部,且所述张紧轮122抵住连接所述第二轴杆8和所述过渡轴11的同步带,过渡轴11上固定安装有相对应的带轮,带轮用于与同步带相连接,利用过渡轴11分别连接第二轴杆8和第三轴杆9,使得第二轴杆8在发生位置变化时,第三轴杆9和过渡轴11之间的位置不便,传动处于静态稳定的状态,第二轴杆8和过渡轴11处于动态连接,因而第二轴杆8和过渡轴11之间相连接的同步带的松紧度在不断地变化,利用扭簧123作用支架121沿着车身1转动调节,使支架121端部的张紧轮122抵住同步带,使第二轴杆8和过渡轴11之间相连接的同步带始终处于紧绷状态,使得传动处于动态稳定的状态,传动效果好,传动效率高;
57.所述伸缩臂机构5包括第二电机51和取货臂本体52,所述第二电机51固定安装在所述车身1内,所述取货臂本体52滑动设于所述车身1上,所述第二电机51上设置有齿轮13,所述取货臂本体52上设置有齿条14,所述齿轮13与所述齿条14啮合,第二电机51转动带动齿轮13转动,齿轮13驱动齿条14沿直线方向运动,因而取货臂本体52沿着直线方向运动并从车身1的一侧伸出,取货臂本体52插入托盘内,或者取货臂本体52的往复式运动将料箱拖到车身1的中央,满足了同时搬运托盘和料箱的工作,功能性强,通用性强;
58.所述取货臂本体52的顶面与所述车身1顶面重合,保证车身1顶面平整,从而保证货物的搬运平稳。
59.工作原理:首先,当车身1需要朝着一个方向运动时,第一电机61始终处于运转状态,其中一组电控离合器62关闭,另一组电控离合器62打开,(可以在车身1内安装控制器,控制器与两个电控离合器62电性连接,控制器起到控制电控离合器62开关的作用),第二驱动轮3处于接触地面的状态,电控离合器62通过同步带驱动第三轴杆9转动,第三轴杆9通过同步带驱动过渡轴11转动,过渡轴11通过同步带驱动第二轴杆8转动,涨紧机构12一直抵住连接第二轴杆8和过渡轴11的同步带,第二轴杆8转动带动连接在其上的第一驱动轮2转动,第三轴杆9转动驱动转向箱10转动(转向箱10选用直角转向箱,用于改变传动方向),在转向箱10的变向作用下,第二驱动轮3开始转动,此时,车身1在第二驱动轮3的驱动作用下运动,其次,当车身1需要抬升或朝着另一个方向运动时,第一电机61始终处于运转状态,两组电控离合器62皆处于打开状态,第二驱动轮3处于接触地面的状态,电控离合器62通过同步带驱动第三轴杆9转动,第三轴杆9通过同步带驱动过渡轴11转动,过渡轴11通过同步带驱动第二轴杆8转动,涨紧机构12一直抵住连接第二轴杆8和过渡轴11的同步带,第二轴杆8转动带动连接在其上的第一驱动轮2转动,第三轴杆9转动驱动转向箱10转动,在转向箱10的变向作用下,第二驱动轮3开始转动,同时,电动离合器通过同步带驱动第一轴杆7转动,第一轴杆7转动时带动蜗杆42转动,蜗杆42转动并驱动涡轮本体43转动,涡轮本体43转动带动螺管44转动,由于螺管44转动的过程中并不产生位置移动,螺接在螺管44上的丝杆45便发生移动,丝杆45自由度与其连接的升降板46一同释放,从而驱动升降板46沿所述箱体41内垂向滑动,升降板46的升降带动第二轴杆8的升降,第一驱动轮2随着第二轴杆8的下降而下降,此时,由于第二轴杆8的位置发生变化,第二轴杆8和过渡轴11之间相连接的同步带的松紧度在不断地变化,扭簧123作用支架121沿着车身1转动调节,使支架121端部的张紧轮122抵住同步带,使第二轴杆8和过渡轴11之间相连接的同步带始终处于紧绷状态,第一驱动轮2代替第二驱动轮3接触地面,车身1在第一驱动轮2的作用下运动,车身1整体的高度也得到了抬升,接着,当车身1需要运输托盘时,第二电机51转动带动齿轮13转动,齿轮13驱动齿条
14沿直线方向运动,因而取货臂本体52沿着直线方向运动并从车身1的一侧伸出,取货臂本体52插入托盘内,最后,当车身1需要运输常规包裹时,直接将包裹放置在车身1顶部即可,另外,可以在车身1内设置伺服驱动器,伺服驱动器连接第一电机61和第二电机51,从而可以控制第一电机61和第二电机51的正反转,那么,第一驱动轮2的转动方向、第二驱动轮3的转动方向、升降板46的上升和下降、取货臂本体52的运动方向都可以得到相应的控制。
60.以上所述,仅为本实用新型较佳的具体实施方式,但本实用新型的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本实用新型揭露的技术范围内,根据本实用新型的技术方案及其实用新型构思加以等同替换或改变,都应涵盖在本实用新型的保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。