1.本实用新型涉及自动导引运输车技术领域,具体为一种带有夹持机械臂的自动导引运输车。
背景技术:
2.自动导引运输车是指装备有电磁或光学等自动导引装置,能够沿规定的导引路径行驶,具有安全保护以及各种移载功能的运输车,自动导引运输车属于轮式移动机器人的范畴,工业应用中不需驾驶员的搬运车,以可充电之蓄电池为其动力来源,一般可透过电脑来控制其行进路线以及行为,或利用电磁轨道来设立其行进路线,电磁轨道黏贴於地板上,则依循电磁轨道所带来的讯息进行移动与动作的运输车。
3.现有的自动导引运输车没有夹持机械臂,在物流与仓储中使用时,是通过人工搬运到运输车上,降低了运输效率,且人工搬运劳动量大,人工成本较高,大大降低了自动导引运输车的实用性。
技术实现要素:
4.(一)解决的技术问题
5.针对现有技术的不足,本实用新型提供了一种带有夹持机械臂的自动导引运输车,以解决上述背景技术中提出的现有的自动导引运输车没有夹持机械臂,在物流与仓储中使用时,是通过人工搬运到运输车上,降低了运输效率,且人工搬运劳动量大,人工成本较高,大大降低了自动导引运输车的实用性的问题。
6.(二)技术方案
7.为实现上述目的,本实用新型提供如下技术方案:一种带有夹持机械臂的自动导引运输车,包括自动导引运输车本体,所述自动导引运输车本体上端的右侧设置有感应箱,所述自动导引运输车本体的上端位于感应箱的边侧设置有防滑垫,所述自动导引运输车本体上端的左侧设置有安装底板,所述安装底板的上端设置有第一活动组件,所述第一活动组件的边侧设置有第二活动组件,所述第二活动组件远离第一活动组件的一端设置有第三活动组件,所述第三活动组件的下端设置有夹持组件,所述防滑垫的上端设置有运输盒,利用夹持组件方便物品的搬运,减少人工成本,同时通过活动组件增加机械臂的灵活性,提高了运输效率。
8.优选的,所述第一活动组件包括支撑板、第一连接杆、第一驱动电机、第一活动臂与第一连接板,所述支撑板对称设置有两个,两个所述支撑板之间设置有第一连接杆,所述第一连接杆的一端延伸至支撑板的外侧固定连接有第一驱动电机,所述第一连接杆的表面位于支撑板的内侧固定连接有第一活动臂,所述第一驱动电机与支撑板通过第一连接板固定连接,所述第一连接杆与支撑板通过轴承转动连接,提高了夹持机械臂的灵活性。
9.优选的,所述第二活动组件包括第二活动臂、电动伸缩杆、活动座、第一端口槽、第二连接杆、第二驱动电机、第二连接板、第二端口槽、第三连接杆、第三驱动电机与第三连接
板,所述第二活动臂的内部安装有电动伸缩杆,所述电动伸缩杆的活动端延伸至第二活动臂的边侧固定连接有活动座,所述第二活动臂远离活动座的一端开设有第一端口槽,所述第一端口槽中设置有第二连接杆,所述第二连接杆的一端延伸至第二活动臂的边侧固定连接有第二驱动电机,所述第二驱动电机与第二活动臂通过第二连接板固定连接,所述活动座远离第二活动臂的一端开设有第二端口槽,所述第二端口槽中设置有第三连接杆,所述第三连接杆的一端延伸至活动座的边侧固定连接有第三驱动电机,所述第三驱动电机与活动座通过第三连接板固定连接,通过电动伸缩杆增加了活动臂的抓取范围。
10.优选的,所述第三活动组件包括第三活动臂、旋转电机与传动杆,所述第三活动臂的内部安装有旋转电机,所述旋转电机的输出端固定连接有传动杆,利用旋转电机带动夹持组件旋转,实现了多方向夹持。
11.优选的,所述夹持组件包括滑动轨道、夹持臂与气缸,所述滑动轨道的边侧设置有夹持臂,所述滑动轨道的上端固定连接有气缸,所述夹持臂与气缸分别关于滑动轨道的竖直中心线对称设置有两个,所述夹持臂的上端与滑动轨道套接,所述气缸的滑动端与夹持臂的上端固定连接,利用夹持臂将物品夹紧固定,实现了夹持功能,便于搬运物品。
12.优选的,所述第二连接杆与第二活动臂通过轴承转动连接,所述第二端口槽与活动座通过轴承转动连接,所述第二连接杆与第一活动臂固定连接,所述电动伸缩杆的固定端与第二活动臂固定连接,所述第三活动臂与第三连接杆固定连接,所述传动杆的下端延伸至第三活动臂的边侧与滑动轨道固定连接,所述传动杆与第三活动臂通过轴承转动连接,利用第二活动臂与第三活动臂的转动,提高了夹持组件的灵活性。
13.与现有技术相比,本实用新型提供了一种带有夹持机械臂的自动导引运输车,具备以下有益效果:
14.1、该带有夹持机械臂的自动导引运输车,利用夹持臂将物品夹紧固定,从而将物品搬运至运输盒中,方便自动导引运输车进行运输,减少人工成本,大大提高了自动导引运输车的实用性。
15.2、该带有夹持机械臂的自动导引运输车,利用驱动电机带动活动臂进行转动,且电动伸缩杆带动活动座移动,增加了夹持臂的灵活性与活动范围,便于夹持臂对物品进行抓取,大大提高了自动导引运输车的运输效率。
附图说明
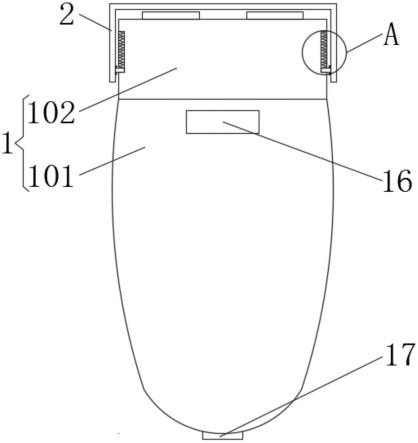
16.图1为本实用新型的立体结构示意图;
17.图2为本实用新型的夹持组件立体结构示意图;
18.图3为本实用新型的活动臂内部结构示意图;
19.图4为本实用新型的活动臂侧剖结构示意图。
20.其中:1、自动导引运输车本体;2、感应箱;3、防滑垫;4、安装底板;5、第一活动组件;6、第二活动组件;7、第三活动组件;8、夹持组件;9、运输盒;501、支撑板;502、第一连接杆;503、第一驱动电机;504、第一活动臂;505、第一连接板;601、第二活动臂;602、电动伸缩杆;603、活动座;604、第一端口槽;605、第二连接杆;606、第二驱动电机;607、第二连接板;608、第二端口槽;609、第三连接杆;610、第三驱动电机;611、第三连接板;701、第三活动臂;702、旋转电机;703、传动杆;801、滑动轨道;802、夹持臂;803、气缸。
具体实施方式
21.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
22.请参阅图1-4,本实用新型提供一种技术方案:一种带有夹持机械臂的自动导引运输车,包括自动导引运输车本体1,自动导引运输车本体1上端的右侧设置有感应箱2,自动导引运输车本体1的上端位于感应箱2的边侧设置有防滑垫3,自动导引运输车本体1上端的左侧设置有安装底板4,安装底板4的上端设置有第一活动组件5,第一活动组件5包括支撑板501、第一连接杆502、第一驱动电机503、第一活动臂504与第一连接板505,支撑板501对称设置有两个,两个支撑板501之间设置有第一连接杆502,第一连接杆502的一端延伸至支撑板501的外侧固定连接有第一驱动电机503,第一连接杆502的表面位于支撑板501的内侧固定连接有第一活动臂504,第一驱动电机503与支撑板501通过第一连接板505固定连接,第一连接杆502与支撑板501通过轴承转动连接,提高了夹持机械臂的灵活性;
23.第一活动组件5的边侧设置有第二活动组件6,第二活动组件6包括第二活动臂601、电动伸缩杆602、活动座603、第一端口槽604、第二连接杆605、第二驱动电机606、第二连接板607、第二端口槽608、第三连接杆609、第三驱动电机610与第三连接板611,第二活动臂601的内部安装有电动伸缩杆602,电动伸缩杆602的活动端延伸至第二活动臂601的边侧固定连接有活动座603,第二活动臂601远离活动座603的一端开设有第一端口槽604,第一端口槽604中设置有第二连接杆605,第二连接杆605的一端延伸至第二活动臂601的边侧固定连接有第二驱动电机606,第二驱动电机606与第二活动臂601通过第二连接板607固定连接,活动座603远离第二活动臂601的一端开设有第二端口槽608,第二端口槽608中设置有第三连接杆609,第三连接杆609的一端延伸至活动座603的边侧固定连接有第三驱动电机610,第三驱动电机610与活动座603通过第三连接板611固定连接,通过电动伸缩杆602增加了活动臂的抓取范围,第二活动组件6远离第一活动组件5的一端设置有第三活动组件7,第三活动组件7包括第三活动臂701、旋转电机702与传动杆703,第三活动臂701的内部安装有旋转电机702,旋转电机702的输出端固定连接有传动杆703,利用旋转电机702带动夹持组件8旋转,实现了多方向夹持;
24.第三活动组件7的下端设置有夹持组件8,夹持组件8包括滑动轨道801、夹持臂802与气缸803,滑动轨道801的边侧设置有夹持臂802,滑动轨道801的上端固定连接有气缸803,夹持臂802与气缸803分别关于滑动轨道801的竖直中心线对称设置有两个,夹持臂802的上端与滑动轨道801套接,气缸803的滑动端与夹持臂802的上端固定连接,利用夹持臂802将物品夹紧固定,实现了夹持功能,便于搬运物品,第二连接杆605与第二活动臂601通过轴承转动连接,第二端口槽608与活动座603通过轴承转动连接,第二连接杆605与第一活动臂504固定连接,电动伸缩杆602的固定端与第二活动臂601固定连接,第三活动臂701与第三连接杆609固定连接,传动杆703的下端延伸至第三活动臂701的边侧与滑动轨道801固定连接,传动杆703与第三活动臂701通过轴承转动连接,利用第二活动臂601与第三活动臂701的转动,提高了夹持组件8的灵活性,防滑垫3的上端设置有运输盒9,利用夹持组件8方便物品的搬运,减少人工成本,同时通过活动组件增加机械臂的灵活性,提高了运输效率。
25.在使用时,将安装底板4安装固定至自动导引运输车本体1上,然后将运输盒9放置防滑垫3上,通过感应箱2控制自动导引运输车本体1移动,在自动导引运输车本体1自动移动至搬运位置后,第一驱动电机503带动第一连接杆502转动,从而使得第一活动臂504以第一连接杆502为圆心进行转动,第二驱动电机606带动第二连接杆605旋转,使得第二活动臂601以第二连接杆605为圆心进行转动,以及第三驱动电机610带动第三连接杆609旋转,使得第三活动臂701以第三连接杆609为圆心进行转动,从而控制夹持组件8的位置,利用气缸803推动夹持臂802移动,使得两个夹持臂802的间距缩小,从而将物品夹紧固定,抓取完成后,通过驱动电机带动活动臂转动,使得夹持臂802移动至运输盒9的上方,气缸803回缩,使得夹持臂802松开物品,将物品放入运输盒9中,最后自动导引运输车本体1将物品运输至合适位置,实现了对物品的夹持抓取功能,无需人工进行搬运,减少人工成本,且结构简单方便控制,大大提高了自动导引运输车的实用性。
26.尽管已经示出和描述了本实用新型的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本实用新型的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本实用新型的范围由所附权利要求及其等同物限定。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。