1.本发明属于机器人技术领域,具体涉及一种易于小型化的高机动性爬虫机器人。
背景技术:
2.小型高机动性机器人在灾后搜寻、内窥镜手术、石油天然气管道巡查等领域具有广泛的应用需求。一般来说,智能仿生爬虫机器人设计要求在较小尺寸下实现较大驱动功率和高机动性。研究人员模拟自然界生物的身体结构和运动模式,提出了如基于形状记忆合金sma、空气压缩等驱动方案,此类方案目前仍受到诸多不利因素限制,例如:实现特定运动模式的拓展依赖于特殊的材料;形状记忆合金丝对温度敏感;压缩空气驱动器需要外接空气压缩机。这些不利因素导致此类机器人目前仍难以实现快速、精准控制,应用场景也受到较多限制。
3.中国专利cn107830307b提出了一种采用四个并联机构串联,两端串接头尾组成的,具有高机动性的尺蠖式蠕动机器人。该专利提出的具有多冗余自由度的机器人躯干设计,使机器人可以实现伸缩、偏转、俯仰等多种运动模式,具有良好的可控性和运动灵活性。模块化设计使机器人具有可拓展的自由度,提高了环境适应性;多节段式多驱动机构设计方法可以在其中任一驱动机构发生故障时提升机器人的鲁棒性。但并行机构躯体的相邻节段间采用错位串联的装配方式,使机器人在具有大的工作空间的同时,也使机器人躯体和地面间需要预留更大的离地间隙,如图1所示,从而保证机器人运动过程中不与地面发生干涉。这种结构设计不利于机器人小型化,此外,仅采用头、尾结构作为躯干支撑,对机器人运动过程中的重心平衡控制、加工精度、装配精度和电机特性均提出了高要求。
4.因此,针对小型化设计和高机动控制要求,爬虫机器人亟需在躯干结构和驱动结构上进行改进。
技术实现要素:
5.本发明的目的在于解决现有设计不利于爬虫机器人向小型化设计和高机动控制发展的不足之处,而提供了一种易于小型化的高机动型爬虫机器人。
6.为实现上述目的,本发明所提供的技术解决方案是:一种易于小型化的高机动性爬虫机器人,包括依次连接的头部、躯干部以及尾部;其特殊之处在于:所述头部和尾部结构对称,头部包含外壳以及位于其内的传感器模块,尾部包括外壳、以及位于其内的传感器模块、电源和控制器;外壳底面还设置有吸附组件;传感器模块安装在头尾相应位置,为机器人自主运动提供反馈信息;吸附组件与地面直接接触,除了提供基本的支撑作用,还通过吸附地面增加了机器人与地面之间的最大静摩擦力,为机器人运动提供了“锚点”。
7.所述躯干部用于负责机器人的蠕动、偏转、俯仰、收缩和伸长等运动,其自尾部向头部方向包括四个串联的完全相同的3自由度驱动机构;
所述3自由度驱动机构采用3-rrrrr并联机构(即驱动机构有3条并联支链,每一个支链均由5个旋转运动副组成),包括两个结构相同的平台以及三条旋转对称连接(120
°
中心对称地连接)在两个平台之间的运动支链;两个平台分别为靠近尾部的基平台和靠近头部的动平台;相邻驱动机构间共用一个平台(即一个驱动机构的动平台同时也是其相邻驱动机构的基平台),且相邻驱动机构的旋转副沿平台法线方向适当错位,以避免相互干涉;共用平台安装在底部支撑足上,支撑足通过抬高身体节段,使得驱动机构上的连杆不会直接接触地面,底部支撑足的高度与头部和尾部的高度一致,即满足:当机器人的所有驱动副旋转角度相同时,所述支撑足与所述头部和尾部共同支撑所述驱动机构,且所述驱动机构中心线应与地面平行;所述平台包括y型本体,y型本体的三条支臂上同时设置有安装臂杆以及销孔座;三个安装臂杆位于平台靠近头部的一侧且三个安装臂杆所在平面相交于同一直线,该直线垂直于y型本体,三个平面两两之间呈120
°
夹角;三个销孔座上的销孔位于平台靠近尾部的一侧且三个销孔座所在平面相交于同一直线,该直线垂直于y型本体,三个平面两两之间呈120
°
夹角;其中,一个安装臂杆相较于地平面位于正上方,其余两个安装臂杆与该安装臂杆均呈120
°
夹角,位于其下方两侧;而销孔座一一对应紧邻安装臂杆设置;每条所述运动支链上包括一个驱动电机和四个连杆;其中,四个连杆依次相连,形成三组转动副,三组转动副的转轴相交于一点;位于头部的连杆外端通过转动副与动平台上的其中一个销孔座连接;所述驱动电机安装在基平台上的其中一个安装臂杆上,其输出轴与位于尾部的连杆连接(将并联支链上与电机相连的连杆称为主动连杆,电机与主动连杆组成的旋转副,称为驱动副,其余的连杆称为被动连杆),对于头部连杆外端转动副转轴、四个连杆间的转动副转轴、以及驱动电机输出轴,相邻转轴之间相互垂直;通过驱动电机驱动位于主动连杆转动,进而改变该连杆与基平台所成角度;当电机驱动主动连杆时,中间的被动连杆跟随运动,通过驱动电机改变关节角的大小,就可以控制三个支链的运动,从而改变顶部动平台的位姿;通过这种驱动方式,动平台可以在空间中产生俯仰、偏转和平移伸缩运动。
8.靠近尾部的驱动机构的基平台与尾部固定连接(即安装在尾部外壳内),靠近头部的驱动该机构的动平台与头部固定连接(即安装在头部外壳内)。
9.进一步地,所述底部支撑足包括相互垂直的底板和支架组件,其中,支架组件为两个相互平行的h型支架,用于安装共用平台。
10.进一步地,所述三个安装臂杆所在平面相交的直线过y型本体几何中心;三个安装臂杆上开设有用于安装驱动电机的安装孔和供穿过驱动电机输出轴的通孔,且三个安装臂杆上的所述通孔中心处于同一圆周上。
11.进一步地,所述三个销孔座所在平面相交的直线过y型本体几何中心,且三个销孔座上的销孔中心处于同一圆周上。
12.进一步地,为了便于导线通过、节省空间,所述y型本体的几何中心处设置有圆孔。
13.进一步地,所述旋转副采用销钉结构。
14.进一步地,所述吸附组件为可变锚定结构,具体是指头部和尾部的外壳底面中部根据应用环境选用摩擦垫或吸盘,两端(即首尾段)则为不带摩擦垫或吸盘的弧形本体结
构,该部分的设计使得头部和尾部处于倾斜状态时与接触面的摩擦力尽可能小,从而增大机器人在进行某些运动时头部和尾部与接触面的摩擦力差值,达到摩擦力可变的效果;可以根据机器人的运动所需的保持力来增大或减小摩擦垫的面积。
15.进一步地,所述头部和尾部为使用3d打印制成的pla材质外壳,其内部为空心结构。
16.进一步地,所述底部支撑足采用3d打印制作,其底部设置有摩擦垫。
17.进一步地,所述摩擦垫为硅胶材质,用于在机器人的运动过程中提供足够大的摩擦力,从而强化机器人在粗糙表面上的运动效果。
18.所述吸盘为真空吸盘或者电磁吸盘;当机器人在表面光滑的接触面(如玻璃等)上运动时,可采用真空吸盘;当机器人在金属表面运动时,可采用电磁吸盘。
19.本发明的优点是:1.本发明提出一种易于小型化的高机动性爬虫机器人,通过结构设计使爬虫机器人具有更好的环境适应性,机器人具备实现仿毛毛虫式蠕动运动和偏转运动等运动模式的能力。
20.2.本发明爬虫机器人,躯干节段采用对称性设计,使爬虫机器人从整体结构上易于小型化。通过驱动机构的收缩可以缩短机器人长度,便于收纳、运输。
21.3.本发明的爬虫机器人具有高的机动性,其躯干结构采用串-并联混合结构设计:串联结构可以实现毛毛虫弯曲运动,并联结构可以实现轴向伸缩运动。同时,对驱动机构中运动支链的连杆进行了结构调整,通过四个转动配合的连杆构建整个运动支链,且四个连杆间的转动副转轴相交于一点,头部连杆外端转动副转轴、四个连杆间的转动副转轴、以及驱动电机输出轴,相邻转轴之间相互垂直,不仅扩大了该机构的运动范围,头尾两端连杆与次之连杆通过转动副连接,也为伸缩运动留有余量,使得整个运动链运动灵活度大大提升,对连杆间的同步性要求低,加工制造精度要求低,容易实现;由此可见,串-并联混合机构增加了机器人的灵活性,使机器人具有三维空间运动能力的同时具备节段伸缩能力,从而提高了其适应环境的能力。4.本发明的爬虫机器人可以通过上下起伏的伸缩运动规划,实现仿毛毛虫式的蠕动运动,受到毛毛虫启发的运动模式,提高了机器人蠕动运动的稳定性。
22.5.本发明的机器人具有爬升、转向、扭转和伸缩等多种运动能力,选择各种不同材料的吸附装置便可使机器人在不同类型的地面和环境工作,因此,其具有广泛应用可能的多功能爬虫机器人,在现有的同类机器人中占有优势。同时,模块化的设计也使机器人具有可拓展的自由度,提高了环境适应性。
23.6.本发明基于多节段冗余自由度的躯干结构串联设计方法,提高了机器人运动的鲁棒性,躯干中一个驱动机构出现故障时,其它驱动机构仍然能够完成运动。
24.7.本发明中将中央控制器、动力源和传感器模块均装配在尾部壳体内,机器人能够实现独立自主控制。
25.8.本发明中驱动机构平台中心的预留空间可以穿过线缆,实现驱动节段的分布式控制。
26.9.本发明爬虫机器人应用范围广泛,不仅可用于石油化工行业的u、v、l型急转弯管道检查;还可用于发动机的检查、维护和机器的清洁;用于洪水、地震、火灾、核事故等灾
难或灾害中,寻找被困在障碍物、残骸上的物体;用于核电站的远程操作和维护,对核反应堆的运行情况进行监测,有助于未来的核反应堆自动化技术的可持续维护和开发;除此之外,有助于更好地诊断人体中的疾病或健康问题,特别是胃肠道、脊髓手术、心脏病学和妇科学等方面,可以帮助运送不同类型的小单元,去除不同身体部位的血液斑块和结石。
27.10.本发明爬虫机器人的高机动性使其可很好的用于空间任务,它可以附着于空间站上,或深入到行星的岩石或表面下进行探索。
附图说明
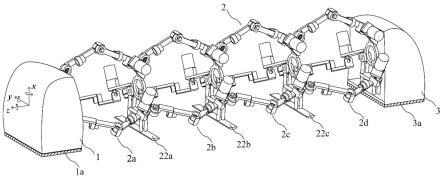
28.图1是专利cn107830307b蠕动时躯体节段离地间隙示意图;图2为本发明高机动性的小型化爬虫机器人结构示意图;图3为本发明机器人躯干结构2b和支撑足22a和22b结构示意图;图4为本发明机器人支撑足22a向前运动时运动轨迹示意图;图5为本发明机器人支撑足22a前进后机器人姿态图;图6给出了支撑足22a和22b抬升时机器人的姿态。
29.图7为本发明机器人驱动机构2b偏转状态下机器人姿态图;图8为一种结合了偏转、俯仰和伸缩的机器人姿态图。
具体实施方式
30.以下结合附图和具体实施例对本发明的内容作进一步的详细描述:本发明的一种易于小型化的高机动性爬虫机器人,具备实现仿毛毛虫式蠕动运动、俯仰运动和偏转运动等运动模式的能力。
31.参见图2,本发明的一种易于小型化的高机动性爬虫机器人,其主体结构包括前侧的头部1、后侧的尾部3、以及中间的躯干部2。
32.为便于理解,在头部1处建立坐标系,下面将头部1绕其x轴的旋转称为偏转,绕其y轴的旋转称为俯仰,绕其z轴的旋转称为滚转。
33.头部1和尾部3在结构上是对称的,均包括了吸附组件(1a和3a)和传感器模块。吸附组件安装在头部和尾部的底面,与地面直接接触,除了提供基本的支撑作用,还通过吸附地面为机器人运动提供了“锚点”。传感器模块安装在头部和尾部相应位置,为机器人自主运动提供反馈信息。机器人尾部还包括了电源模块和中央控制器,均安装在尾部内部。
34.头部1和尾部3可以使用3d打印制成的pla材质外壳。壳体内部是空心结构,不仅可以减轻重量,还可以在空腔内安装电源模块、中央控制器和传感器模块等。
35.吸附组件可以选用橡胶材质的摩擦垫。当运动时,机器人自身重力和驱动电机产生的扭转力共同作用到摩擦垫上,使摩擦垫对地面产生压力。地面与摩擦垫之间的静摩擦力推动机器人运动。最大静摩擦力的大小与摩擦垫对地面的压力成正比。根据不同的接触表面材质,还可以选择其它类型的吸附组件。例如,在玻璃上移动可采用真空吸盘;在金属表面移动可采用电磁垫。
36.躯干结构2主要负责机器人的蠕动,转向,提升,收缩和伸长等运动,包括4个完全相同的3自由度驱动机构(分别是2a、2b、2c和2d)以及底部的支撑足(分别是22a、22b、22c)。
37.本发明所设计的三自由度驱动机构不仅能够实现快速的蠕动运动,而且具有全半
球转动能力,使得机器人能够以更小的半径进行大幅度转向以及躯体提升。
38.以驱动机构2b和支撑足22a和22b为例,详细说明其结构,参见图3。驱动机构是3-rrrrr并联机构,表示机构有3条运动支链,分别为支链20a、20b和20c。这3条运动支链具有相同的结构。除了3条并联的运动支链,驱动机构还包含有分别位于运动支链两侧的基平台21b和动平台21a,两平台具有相同的机械结构,包括y型本体,y型本体的三条支臂上同时设置有安装臂杆以及销孔座;三个安装臂杆位于平台靠近头部的一侧且三个安装臂杆所在平面相交于同一直线,该直线垂直于y型本体,三个平面两两之间呈120
°
夹角;三个销孔座上的销孔位于平台靠近尾部的一侧且三个销孔座所在平面相交于同一直线,该直线垂直于y型本体,三个平面两两之间呈120
°
夹角;其中,一个安装臂杆相较于地平面位于正上方,其余两个安装臂杆与该安装臂杆均呈120
°
夹角,位于其下方两侧;而销孔座一一对应紧邻安装臂杆设置;三个安装臂杆所在平面相交的直线过y型本体几何中心;三个安装臂杆上开设有用于安装驱动电机的安装孔和供穿过驱动电机输出轴的通孔,且三个安装臂杆上的所述通孔中心处于同一圆周上。三个销孔座所在平面相交的直线过y型本体几何中心,且三个销孔座上的销孔中心处于同一圆周上。为了便于导线通过、节省空间,所述y型本体的几何中心处设置有圆孔。并联运动支链通过120
°
旋转对称连接基平台21b和动平台21a。
39.以运动支链20a为例,支链上共有4个连杆,分别为连杆201、202、203和204。相邻连杆之间由一个旋转副连接。驱动电机200固定在基平台21b上,其输出轴穿过基平台21b上预留的通孔后与连杆201固连,连杆201侧面的通孔形状与驱动电机的输出轴截面形状相同。由此,驱动电机200旋转带动连杆201绕驱动电机轴向转动,从而改变连杆201与基平台21b所成角度。在驱动机构2b另一侧,连杆204与动平台21a通过旋转副连接。运动支链20b和20c与20a结构相同。
40.将并联支链上与驱动电机相连的连杆称为主动连杆,驱动电机与主动连杆组成的旋转副,称为驱动副,其余的连杆称为被动连杆。当驱动电机驱动主动连杆时,中间的被动连杆跟随运动。通过驱动电机改变关节角的大小,就可以控制三个运动支链的运动,从而改变顶部动平台的位姿。具体而言,运动支链20a和20b上的驱动电机转动角度相同时,通过改变二者与支链20c上驱动电机角度的差值可以控制动平台21a相对于基平台21b的俯仰角度。运动支链20a和20b上的电机转动角度不同时,动平台21a会相对于基平台21b偏转。运动支链20a、20b和20c角度的绝对大小决定了平台21a和21b之间的距离,即驱动机构的伸缩程度。通过这种驱动方式,驱动机构的动平台可以在空间中产生俯仰、偏转和平移伸缩运动。
41.需要说明的是,驱动机构的动平台同时也是其相邻机构的基平台。例如,驱动机构2a的基平台是21a,后者同时也是驱动机构2b的动平台。虽然驱动机构2a和2b共用平台21a,但是两个驱动机构的旋转副通过沿平台法线方向适当错位,避免机构间相互干涉。
42.需要说明的是,底部支撑足22a、22b和22c的高度应与头部1和尾部3的高度一致,使所有驱动副旋转角度相等时,支撑足底部、头尾底部均在同一个平面上,且所有驱动机构中心线应与地面平行可选地,在一些实施例中,旋转副采用销钉的结构。销钉穿过相邻连杆末端的通孔将二者连接在一起,使得二者可以沿着销钉旋转。
43.可选地,在一些实施例中,底部支撑足22a、22b和22c使用3d打印制作。支撑足底部与地面接触的部分可以安装摩擦垫,提高运动的稳定性。
44.按照“尾部3—支撑足22c—支撑足22b—支撑足22a—头部1”的顺序周期性地依次沿前进方向移动相应的支撑足或头尾即可令机器人向前运动。图4以支撑足22a为例给出了支撑足向前运动时运动轨迹示意图,图中箭头表示支撑足底部的示意运动轨迹。支撑足22a先抬起再落地,同时向前运动。在此过程中,支撑足22b则抬起再落回原地。图5给出了支撑足22a前进后机器人姿态图。图6给出了支撑足22a和22b抬升时机器人的姿态,图中,支撑足22a和22b距离地面的高度为。通过在支撑足前进过程中插入抬升和落地的动作,实现毛毛虫式波浪起伏蠕动的运动模式。增加驱动机构伸缩幅度可以增加支撑足前进幅度,从而提升蠕动速度;而通过提高蠕动过程中支撑足抬升高度可以提高机器人运动的稳定性。图7以驱动机构2b为例给出了偏转状态下机器人的姿态,通过改变蠕动运动过程中支链20a和20b上驱动副角度之差,可以使机器人路线发生偏转,从而实现转弯运动。
45.本发明的爬虫机器人还可以同时进行蠕动和弯曲结合的复合运动,其可以是爬升,转向,扭转以及伸长和缩回的组合。根据情况,通过控制驱动机构(2a,2b,2c和2d)的运动产生这种复杂的姿态,如图8所示。
46.在描述本发明附图所示的具体实例中,为了表述清晰,采用了专业术语。但本发明不仅限于所选择的专业术语,每个特定部分包括以类似方式操作或以实现类似目的的所有技术等同。基于本发明揭示的技术,相应的修正和变化,都应涵盖在本发明的保护范围之内。例如,类似于本发明,改变躯干结构的几何构型。只要是类似于本发明的设计思想和运动设计思路,类似于本发明的3自由度的运动方式,都应在本发明保护范围,即本发明的保护范围以权利要求书的保护范围为准。以上所述,仅为本发明的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明公开的技术范围内,可轻易想到各种等效的修改或替换,这些修改或替换都应涵盖在本发明的保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。
