技术特征:
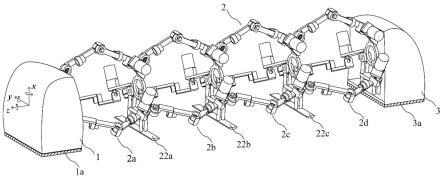
1.一种易于小型化的高机动性爬虫机器人,包括依次连接的头部、躯干部以及尾部;其特征在于:所述头部和尾部结构对称,其外壳底面设置有吸附组件;所述躯干部自尾部向头部方向包括四个串联的3自由度驱动机构;所述3自由度驱动机构采用3-rrrrr并联机构,包括两个结构相同的平台以及三条旋转对称连接在两个平台之间的运动支链;两个平台分别为靠近尾部的基平台和靠近头部的动平台;相邻驱动机构间共用一个平台,且相邻驱动机构的旋转副沿平台法线方向错位;共用平台安装在底部支撑足上,底部支撑足的高度与头部和尾部的高度一致;所述平台包括y型本体,y型本体的三条支臂上同时设置有安装臂杆以及销孔座;三个安装臂杆位于平台靠近头部的一侧且三个安装臂杆所在平面相交于同一直线,该直线垂直于y型本体,三个平面两两之间呈120
°
夹角;三个销孔座上的销孔位于平台靠近尾部的一侧且三个销孔座所在平面相交于同一直线,该直线垂直于y型本体,三个平面两两之间呈120
°
夹角;每条所述运动支链上包括一个驱动电机和四个连杆;其中,四个连杆依次相连,形成三组转动副,三组转动副的转轴相交于一点;位于头部的连杆外端通过转动副与动平台上的其中一个销孔座连接;所述驱动电机安装在基平台上的其中一个安装臂杆上,其输出轴与位于尾部的连杆连接;对于头部连杆外端转动副转轴、四个连杆间的转动副转轴、以及驱动电机输出轴,相邻转轴之间相互垂直;通过驱动电机驱动位于尾部的连杆转动,进而改变该连杆与基平台所成角度;靠近尾部的驱动机构的基平台与尾部固定连接,靠近头部的驱动机构的动平台与头部固定连接。2.根据权利要求1所述易于小型化的高机动性爬虫机器人,其特征在于:所述底部支撑足包括相互垂直的底板和支架组件,其中,支架组件为两个相互平行的h型支架,用于安装共用平台。3.根据权利要求1或2所述易于小型化的高机动性爬虫机器人,其特征在于:所述三个安装臂杆所在平面相交的直线过y型本体几何中心;三个安装臂杆上开设有用于安装驱动电机的安装孔和供穿过驱动电机输出轴的通孔,且三个安装臂杆上的所述通孔中心处于同一圆周上。4.根据权利要求3所述易于小型化的高机动性爬虫机器人,其特征在于:所述三个销孔座所在平面相交的直线过y型本体几何中心,且三个销孔座上的销孔中心处于同一圆周上。5.根据权利要求4所述易于小型化的高机动性爬虫机器人,其特征在于:所述y型本体的几何中心处设置有圆孔。6.根据权利要求5所述易于小型化的高机动性爬虫机器人,其特征在于:所述旋转副采用销钉结构。7.根据权利要求6所述易于小型化的高机动性爬虫机器人,其特征在于:所述吸附组件为可变锚定结构,具体是指头部和尾部的外壳底面中部根据应用环境选用摩擦垫或吸盘,两端则为不带摩擦垫或吸盘的弧形本体结构。
8.根据权利要求7所述易于小型化的高机动性爬虫机器人,其特征在于:所述头部和尾部为使用3d打印制成的pla材质外壳,其内部为空心结构。9.根据权利要求8所述易于小型化的高机动性爬虫机器人,其特征在于:所述底部支撑足采用3d打印制作,其底部设置有摩擦垫。10.根据权利要求9所述易于小型化的高机动性爬虫机器人,其特征在于:所述摩擦垫为硅胶材质;所述吸盘为真空吸盘或者电磁吸盘。
技术总结
本发明提供了一种易于小型化的高机动性爬虫机器人,解决现有设计不利于爬虫机器人向小型化设计和高机动控制发展的不足之处。本发明爬虫机器人躯干节段采用对称性设计,使爬虫机器人从整体结构上易于小型化,具有高的机动性,其躯干结构采用串-并联混合结构设计:串联结构可以实现毛毛虫弯曲运动,并联结构可以实现轴向伸缩运动。因此串-并联混合机构增加了机器人的灵活性,使机器人具有三维空间运动能力的同时具备节段伸缩能力,从而提高了其适应环境的能力。环境的能力。环境的能力。
技术研发人员:杨建华 王众丞 姜霞兵 李世博
受保护的技术使用者:西北工业大学
技术研发日:2022.09.29
技术公布日:2022/11/18
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。