1.本发明属于材料表征测量技术领域,涉及晶界测量技术领域,具体涉及一种基于纳米机器人的氧化锌立体晶界空间层原位重构系统及方法。
背景技术:
2.氧化锌陶瓷作为功能陶瓷的典型代表,具有优异的电压敏特性。晶界作为高非线性电压敏特性的内在本质特征,实际上沿三维空间方向的结构是非均匀存在的。但由于三维晶界空间层结构存在不规则性,导致电特性计算时常常需做简化处理和分析。现有方法对块体电导率计算研究时,通常是单一地对块体进行均匀划分,简单地采用砖体模型分析方法,此易导致人为地引入了单个晶界计算的随机性误差。另外,现有晶界研究方法多聚焦光学显微镜下二维平整表面的单/多晶界的单独研究,样品二维运动控制精度和速度较低,缺少三维方向上的晶界结构研究以及更小尺寸下特性耦合的研究,导致缺乏氧化锌立体晶界空间层结构重构的方法。
技术实现要素:
3.本发明的目的在于提供一种可精准重构三维晶界结构的基于纳米机器人的氧化锌立体晶界空间层原位重构系统及方法。
4.基于上述目的,本发明采用如下技术方案:一种基于纳米机器人的氧化锌立体晶界空间层原位重构系统,包括扫描电子显微镜,扫描电子显微镜中固定有基础平台,基础平台上固连有左右对称的一对第一压电陶瓷运动台,还固连有前后对称的一对第二压电陶瓷运动台;第一压电陶瓷运动台和第二压电陶瓷运动台上放置有样品台;基础平台上设置有一对左右对称的纳米机器人,样品台设置在纳米机器人之间;每个纳米机器人上均连接有末端。
5.进一步的,纳米机器人包括三个堆叠的直线压电陶瓷;每个第一压电陶瓷运动台均包括两个堆叠的直线压电陶瓷,每个第二压电陶瓷运动台均包括两个堆叠的直线压电陶瓷。
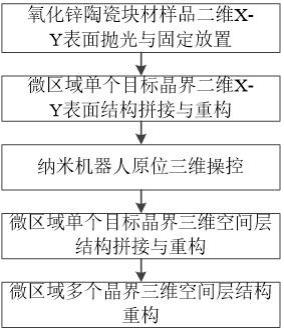
6.一种基于纳米机器人的氧化锌立体晶界空间层原位重构方法,包括以下步骤,步骤1,氧化锌陶瓷块材样品表面抛光与固定放置;取氧化锌陶瓷块材样品,对氧化锌陶瓷块材样品的一个面进行抛光处理,将抛光的面记为二维x-y面,与二维x-y面垂直的两个面分别记为二维x-z面、二维y-z面;将二维x-y面向上,把氧化锌陶瓷块材样品固定在样品台上;步骤2,微区域内每个目标晶界二维x-y面结构拼接与重构,获取微区域内所有目标晶粒在在二维x-y面的形貌结构;步骤3,操作目标晶粒,获取目标晶粒在二维x-z面、二维y-z面的形貌结构;步骤4,根据目标晶粒在不同面内的形貌结构,将单个目标晶界的三维空间层结构
拼接与重构;步骤5,重复步骤3-4,对微区域内的其他单个目标晶界的三维空间层结构进行重构;步骤6,移动氧化锌陶瓷块材样品,重复步骤2-5,对其他微区域内的目标晶界的三维空间层结构进行重构。
7.进一步的,在步骤2中,每个目标晶界二维x-y面结构拼接与重构的方法为:利用sem对氧化锌陶瓷块材样品的被观测二维x-y表面的微区域内的每个目标晶界进行实时成像,采用图像处理技术提取出每个目标晶界的相邻两个目标晶粒的边界线轮廓;将所有的相邻两个目标晶粒的边界线轮廓重构。
8.进一步的,在步骤2中,将相邻两个目标晶粒的边界线轮廓重构的方法为:基于最小二乘法拟合获取两个晶粒的边界线轮廓数据,再利用图像拼接法对两个晶粒的边界线轮廓数据进行拼接,完成两个晶粒边界线轮廓的结构重构。
9.进一步的,在步骤3中,操作氧化锌陶瓷块材样品的方法为:利用纳米机器人末端对两个晶粒进行翻转、推拉,分别对两个晶粒依次按照二维x-y面、二维x-z面、二维y-z面向上的顺序进行推拉操作和原位操控。
10.进一步的,在步骤4中,单个目标晶界的三维空间层结构拼接与重构的方法为:对步骤3中两个晶粒的二维x-y面和二维x-z面内的形貌结构进行图像拼接,再与两个晶粒的二维y-z面内形貌结构进行图像拼接,获取相邻两个晶粒的三维形貌结构,从而对相邻两个晶粒所构成的单个目标晶界的三维空间层结构进行图像拼接与重构。
11.进一步的,在步骤6中,移动氧化锌陶瓷块材样品的方法为:使用第一压电陶瓷运动台和第二压电陶瓷运动台带动氧化锌陶瓷块材样品朝向x向或y向进行纳米级运动,使氧化锌陶瓷块材样品运动至微区域内的下一个单个目标晶界。
12.进一步的,在步骤6中,带动氧化锌陶瓷块材样品朝向x向运动的方法为:第二压电陶瓷运动台下降并与样品台分离,第一压电陶瓷运动台沿x向运动,并带动样品台和氧化锌陶瓷块材样品朝向x向运动;带动氧化锌陶瓷块材样品朝向y向运动的方法为:第一压电陶瓷运动台下降并与样品台分离,第二压电陶瓷运动台沿y向运动,并带动样品台和氧化锌陶瓷块材样品朝向y向运动。
13.与现有技术相比,本发明具有以下有益效果:1、本发明利用图像拼接法对单个目标晶界的相邻两个晶粒和的边界线轮廓数据进行拼接,实现对单个目标晶界的相邻两个晶粒边界线轮廓的结构重构,从而达到对氧化锌陶瓷块材样品的微区域单个目标晶界进行二维x-y表面结构自动重构的目的。
14.2、驱动纳米机器人进行实时准确运动和定位,利用纳米机器人末端分别依次对单个目标晶界的相邻两个晶粒依次按照二维x-y、二维x-z、二维y-z的面内方向顺序进行推拉操作和原位操控,同时基于sem分别对晶粒沿二维x-y、二维x-z、二维y-z的面内方向的形貌结构进行实时成像,从而达到对氧化锌单个目标晶界的相邻两个晶粒在不同二维面内形貌结构进行实时准确定位、原位操控和实时成像的目的。
15.3、当利用纳米机器人对氧化锌陶瓷块材样品的微区域内的单个目标晶界的相邻两个晶粒的不同二面内形貌结构进行原位操控和实时成像后,通过对单个目标晶界的相邻两个晶粒的二维x-y和二维x-z的面内形貌结构进行图像拼接,再与二维y-z面内形貌结构
进行图像拼接以获取相邻两个晶粒的三维形貌结构,从而达到对相邻两个晶粒所构成的单个目标晶界的三维空间层结构进行图像拼接与重构的目的。
16.4、联合控制第一压电陶瓷运动台和第二压电陶瓷运动台,精确带动方形样品台上的氧化锌陶瓷块材样品朝向x向或y向进行纳米级运动,从而精确控制氧化锌陶瓷块材样品精确运动至微区域内的下一个单个目标晶界,重复上述步骤(2)至步骤(4),可实现对氧化锌陶瓷块材样品的微区域多个晶界gb2、gb3、
……
、gb
n-1
和gbn进行三维空间层结构的原位操控与重构,从而达到对氧化锌陶瓷块材样品的多个晶界三维空间层结构进行重构的目的。
17.5、本发明通过联合驱动第一压电陶瓷运动台和第二压电陶瓷运动台,可带动样品台上的氧化锌陶瓷块材样品分别沿x向或y向进行单维度的快速精确纳米运动,从而达到快速扩大氧化锌陶瓷块材样品的sem视野成像范围的目的。
18.综上所述,本发明解决了现有光学显微镜下晶界表征时存在的砖体模型分析误差大、晶界空间层真实三维结构缺乏且无法准确获取更小尺寸晶界空间层结构信息等问题,可实现氧化锌晶界的立体操作、空间层原位重构等功能;具有原位观测、原位操控、自动重构、实时准确定位、实时成像、快速运动控制等特点。
附图说明
19.图1为本发明实施例1的主视图;图2为本发明实施例1的俯视图;图3为本发明实施例2的流程图;图4为本发明实施例2的单个目标晶界成像示意图。
20.图中:纳米机器人1、末端2、第一压电陶瓷运动台3、氧化锌陶瓷块材样品4、样品台5、底座6、基础平台7、第二压电陶瓷运动台8。
具体实施方式
21.实施例1一种基于纳米机器人1的氧化锌立体晶界空间层原位重构系统,如图1-2所示,包括扫描电子显微镜sem,扫描电子显微镜包括样品架,样品架上固定有圆盘状的基础平台7,基础平台7上表面固连有左右对称的一对第一压电陶瓷运动台3,还固连有前后对称的一对第二压电陶瓷运动台8;第一压电陶瓷运动台3和第二压电陶瓷运动台8的下表面均固定在圆形基础平台7上。第一压电陶瓷运动台3和第二压电陶瓷运动台8上表面放置有样品台5,样品台5为四棱柱结构;第一压电陶瓷运动台3包括2个,对称布置在沿2个纳米机器人中心连线p-p'上;所述第二压电陶瓷运动台8包括2个,对称布置在垂直于2个纳米机器人中心连线p-p'的o-o'连线上;第一压电陶瓷运动台3包括2个直线压电陶瓷堆叠组成,同时驱动2个第一压电陶瓷运动台3,可实现第一压电陶瓷运动台3的上表面沿x向或y向进行单维度的精确纳米运动;第二压电陶瓷运动台8包括2个直线压电陶瓷堆叠组成,同时驱动2个第一压电陶瓷运动台8,可实现第二压电陶瓷运动台8的上表面沿x向或y向进行单维度的精确纳米运动;通过联合驱动第一压电陶瓷运动台3和第二压电陶瓷运动台8,可带动样品台5上的氧化锌陶瓷块材样品4分别沿x向或y向进行单维度的快速精确纳米运动,从而达到快速扩大氧化锌陶瓷块材样品4的sem视野成像范围的目的。基础平台7上设置有一对左右对称的底座
6,每个底座6均竖直设置,每个底座6上均设置有纳米机器人1,每个纳米机器人1均由三个直线压电陶瓷堆叠组成,样品台5设置在两个纳米机器人1之间;每个纳米机器人1上均连接有末端2。通过驱动两个纳米机器人1产生相对运动,可控制末端2之间相互配合以实现对氧化锌陶瓷块材样品4上目标晶界的相邻晶粒进行原位三维操控的目的。
22.实施例2利用实施例1的系统进行氧化锌立体晶界空间层原位重构的方法,其步骤如图3-4所示,具体为,步骤1,氧化锌陶瓷块材样品4表面抛光与固定放置;取氧化锌陶瓷块材样品4,对氧化锌陶瓷块材样品4的一个面进行抛光处理,将抛光的面记为二维x-y面,与二维x-y面垂直的两个面分别记为二维x-z面、二维y-z面;将被观测二维x-y面向上放置在sem视野成像中央,把氧化锌陶瓷块材样品4固定防止在方形样品台5上,从而为氧化锌陶瓷块材样品4的原位观测和原位操控提供基本的被观测二维x-y表面对象。
23.步骤2,微区域s1内每个目标晶界二维x-y表面结构拼接与重构:利用sem对氧化锌陶瓷块材样品4的被观测二维x-y表面的微区域s1内的每个目标晶界gb1、gb2、gb3、
……
、gb
n-1
和gbn进行实时成像,采用图像处理技术提取出被观测二维x-y表面的微区域s1内的每个目标晶界gb1、gb2、
……
gbn的相邻两个晶粒g1和g2的边界线轮廓l
t1
、l
t2
,基于最小二乘法拟合获取二维x-y表面的微区域s1内的所有目标晶界gb1、gb2、
……
gbn的相邻两个晶粒g1和g2的边界线轮廓数据l1、l2,再利用图像拼接法对每个目标晶界gb1、gb2、
……
gbn的相邻两个晶粒g1和g2的边界线轮廓数据l1、l2进行拼接,实现对每个目标晶界gb1的相邻两个晶粒g1和g2边界线轮廓的结构重构,从而达到对氧化锌陶瓷块材样品4的微区域s1内每个目标晶界进行二维x-y表面结构自动重构的目的。
24.步骤3,纳米机器人1原位三维操控:当对氧化锌陶瓷块材样品4的被观测二维x-y表面的微区域s1内每个目标晶界gb1、gb2、
……
gbn进行二维结构自动重构后,驱动纳米机器人1进行实时准确运动和定位,利用纳米机器人1的末端2分别对单个目标晶界gb1的相邻两个晶粒g1和g2依次按照二维x-y、二维x-z、二维y-z的面内方向顺序进行推拉操作和原位操控,原位操控的过程为:对晶粒进行推拉和翻转后,使晶粒仍处于原位置上,令sem可分别对两个晶粒的各个面成像,同时基于sem分别对晶粒g1和g2沿二维x-y、二维x-z、二维y-z的面内方向的形貌结构进行实时成像,从而达到对氧化锌单个目标晶界gb1的相邻两个晶粒g1和g2在不同二维面内形貌结构进行实时准确定位、原位操控和实时成像的目的。
25.步骤4,微区域s1内单个目标晶界三维空间层结构拼接与重构:当利用纳米机器人1对氧化锌陶瓷块材样品4的微区域s1内的单个目标晶界gb1的相邻两个晶粒g1和g2的不同二面内形貌结构进行原位操控和实时成像后,通过对单个目标晶界gb1的相邻两个晶粒g1和g2的二维x-y和二维x-z的面内形貌结构进行图像拼接,再与二维y-z面内形貌结构进行图像拼接以获取相邻两个晶粒g1和g2的三维形貌结构,从而达到对相邻两个晶粒g1和g2所构成的单个目标晶界gb1的三维空间层结构进行图像拼接与重构的目的。
26.步骤5,微区域s1内多个晶界三维空间层结构重构:重复上述步骤3至步骤4,可实现对氧化锌陶瓷块材样品4的微区域s1内多个晶界gb2、gb3、
……
、gb
n-1
和gbn进行三维空间层结构的原位操控与重构,从而达到对氧化锌陶瓷块材样品4的微区域s1内多个晶界三维空间层结构进行重构的目的。
27.步骤6,移动氧化锌陶瓷块材样品,联合控制第一压电陶瓷运动台3和第二压电陶瓷运动台8,精确带动方形样品台5上的氧化锌陶瓷块材样品4朝向x向或y向进行纳米级运动,从而精确控制氧化锌陶瓷块材样品4精确运动至微区域s1内的下一个单个目标晶界,重复步骤2-5,对其他微区域s2、s3……
sn内的多个晶界的三维空间层结构进行重构。带动氧化锌陶瓷块材样品4朝向x向运动的方法为:第二压电陶瓷运动台8下降并与样品台分离,第一压电陶瓷运动台3沿x向运动,并带动样品台5和氧化锌陶瓷块材样品4朝向x向运动;带动氧化锌陶瓷块材样品4朝向y向运动的方法为:第一压电陶瓷运动台3下降并与样品台分离,第二压电陶瓷运动台8沿y向运动,并带动样品台5和氧化锌陶瓷块材样品4朝向y向运动。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。
