1.本发明涉及半导体制造技术领域,尤其涉及应用于半导体加工设备的晶圆转移装置。
背景技术:
2.在半导体制程中,为了能够提升生成效率,在多个工序设备中,会同时设置多个腔室,以能够使得多个腔室同时完成加工工序。因在半导体制程中,会存在多个不同的工序,晶圆需要通过机械手臂在多个不同设备中传递。目前半导体制程中所使用的机械手臂会分为上下两层,每层具有两个机械手臂,每层中的机械手臂通过一套控制装置控制,同时进出不同的腔体。当其中一个腔体出现故障无法运行时,同层中的机械手臂无法独立运行,导致未出现故障的腔室无法运行,导致设备的产能受到较大的影响。
技术实现要素:
3.本发明所要解决的技术问题在于,提供一种晶圆转移装置,使得每个机械手臂能够独立运行,解决了现有技术中机械手臂同步运动导致的产能下降的问题。
4.为了解决上述技术问题,根据本发明一方面,提供了一种晶圆转移装置,应用于半导体加工设备,其特征在于,包括:支撑部、多个机械手臂和驱动部;
5.其中,多个所述机械手臂分多层连接于所述支撑部,每层具有多个所述机械手臂;
6.每个所述机械手臂包括承载部和连接部,所述承载部铰接于所述连接部的一端,所述连接部的另一端铰接于所述支撑部;
7.所述驱动部分别连接每个所述机械手臂,以驱动每个所述机械手臂的所述承载部相较于所述连接部转动,以及驱动所述连接部相较于所述支撑部转动。
8.在一些实施方式中,所述连接部包括多个连接杆,多个所述连接杆依次铰接,多个所述连接杆中处于两端的所述连接杆分别铰接于所述承载部和所述支撑部。
9.在一些实施方式中,所述承载部和所述支撑部通过轴承连接于所述连接部,所述连接部的各所述连接杆通过轴承依次连接。
10.在一些实施方式中,所述驱动部为多个,每个所述驱动部分别设置于所述承载部和所述支撑部与所述连接部的铰接处,以及设置于所述多个连接杆之间的铰接处。
11.在一些实施方式中,多个机械手臂分两层连接于所述支撑部,每层包括有两个所述机械手臂。
12.在一些实施方式中,所述装置还包括限位部,所述限位部连接于所述承载部,以对放置于所述承载部上的晶圆进行限位。
13.在一些实施方式中,所述限位部连接于所述承载部的部分外周缘,所述晶圆放置于所述承载部后,所述晶圆的外周缘的部分抵靠于所述限位部。
14.在一些实施方式中,所述装置还包括吸附单元,所述吸附单元设置于所述承载部上,以吸附放置于所述承载部上的晶圆。
15.在一些实施方式中,所述吸附单元包括真空泵和设置于所述承载部上的多个通孔,所述真空泵连接于多个所述通孔,以抽取所述通孔内的气体,使得所述晶圆吸附于所述承载部。
16.在一些实施方式中,所述承载部和/或所述连接部上设置有位置感应单元,以相互感应处于同一层的所述机械手臂的位置。
17.本发明与现有技术相比具有明显的优点和有益效果。借由上述技术方案,本发明的一种晶圆转移装置,可以达到相当的技术进步性及实用性,并具有产业上的广泛利用价值,其至少具有下列优点:
18.(1)本发明的晶圆转移装置将多个机械手臂均单独设置,实现了机械手臂的独立运行,避免了因半导体加工设备的多个腔室中一个腔室出现故障后,导致其他腔室无法正常运转的情况,保证了半导体加工设备的运行效率,提高了半导体加工设备的产能。
19.(2)本发明在晶圆转移装置上设置限位部,在晶圆转移过程中,能够实现对晶圆位置的限定,避免了设备需要重新调整晶圆位置的情况。
20.(3)本发明在晶圆转移装置上设置有吸附单元,在晶圆转移过程中将晶圆牢固地吸附在晶圆转移装置的承载部上,避免了在转移过程中,晶圆出现滑落的情况。
21.上述说明仅是本发明技术方案的概述,为了能够更清楚了解本发明的技术手段,而可依照说明书的内容予以实施,并且为了让本发明的上述和其他目的、特征和优点能够更明显易懂,以下特举较佳实施例,并配合附图,详细说明如下。
附图说明
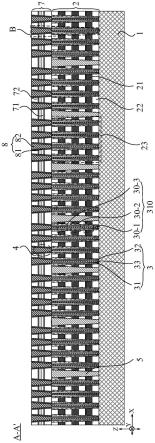
22.图1示出了本发明一实施例的晶圆转移装置的结构俯视示意图;
23.图2示出了本发明一实施例的晶圆转移装置的承载部的结构示意图。
24.【符号说明】
25.1、支撑部
26.2、机械手臂
27.21、承载部
28.22、连接部
29.221、连接杆
30.3、限位部
31.4、吸附单元
32.41、通孔
具体实施方式
33.为更进一步阐述本发明,以下结合附图,对依据本发明提出的一种晶圆转移装置的具体实施方式,进行详细说明。
34.如图1所示,本发明实施例提供了一种晶圆转移装置,该晶圆转移装置应用于半导体加工设备,其包括:支撑部1、多个机械手臂2和驱动部(图中未示出)。
35.其中,多个机械手臂2分多层连接于支撑部1,且每层具有多个机械手臂2。具体地,多个机械手臂2沿支撑部1的轴向分为多层布置,并连接于支撑部1,同时为了能够同时为半
导体加工设备的多个腔体提供晶圆的转移工序,每层中均包括有多个机械手臂2。
36.在一具体实施例中,多个机械手臂2分为两层连接于支撑部1,每层中包括两个机械手臂2。在该实施例中,当每层中两个机械手臂2对应的半导体加工设备的两个腔室中的一个出现故障时,未出现故障的腔室所对应的机械手臂2仍能够继续进行晶圆的转移,并不会导致两个腔体均无法运行的情况。保证了半导体加工设备的产能。
37.进一步地,每个机械手臂2均包括承载部21和连接部22。承载部21用于在晶圆的转移过程中承载晶圆,承载部21通过连接部22连接于支撑部1。承载部21铰接于连接部22的一端,该连接部22的另一端则铰接于支撑部1。
38.驱动部则连接于每个机械手臂2,用于驱动每个机械手臂2的承载部21相较于连接部22转动,以及驱动连接部22相较于支撑部1转动。
39.具体地,驱动部可以为一个,同时连接于多个机械手臂2,驱动多个机械手臂2的运行。驱动部还可以是多个,分别连接于多个机械手臂2。承载部21相较于连接部22转动,可以是平行于水平面转动,也可以是垂直于水平面转动,本发明并不以此为限。
40.优选地,驱动部为多个,该多个驱动部分别设置于承载部21与连接部22的铰接处,连接部22与支撑部1的铰接处,以及连接部22的多个连接杆221之间的铰接处。
41.在一实施例中,连接部22包括多个依次铰接的连接杆221,以能够更加灵活的驱动承载部21的移动。多个依次铰接的连接杆221中处于两端连接杆221分别铰接于承载部21和支撑部1。
42.在一具体实施方式中,驱动部为马达,多个连接杆221之间通过轴承实现铰接,承载部21与连接部22之间通过轴承实现铰接,连接部22与支撑部1之间通过轴承实现铰接。
43.在一实施例中,晶圆转移装置还设置有限位部3,该限位部3连接于承载部21,以对放置在承载部21上的晶圆的位置进行限定,以避免在将晶圆放置于半导体加工设备后需要对晶圆的位置进行调整的情况,提升了设备的运行效率。
44.进一步地,限位部3连接于承载部21的外周缘的部分,在晶圆放置于承载部21后,晶圆的外周缘的部分抵靠于限位部3,以实现对晶圆位置的限定。更进一步地,限位部3连接于承载部21的外周缘部分,小于或等于承载部21外周缘的一半。
45.在一实施例中,晶圆转移装置还设置有吸附单元4,该吸附单元4设置于承载部21上,以吸附放置于承载部21上的晶圆,以防止在快速移动过程中,晶圆出现位置移动或滑落的情况。
46.具体地,该吸附单元4包括设置于承载部21上的多个通孔41和连接于多个通孔41的真空泵(图中未示出),以通过真空泵抽取通孔41内的气体,实现对放置于承载部21上的晶圆的吸附。
47.在一实施例中,在承载部21和/或连接部22上还设置有位置感应单元(图中未示出),以能够实现位于同一层的机械手臂2互相感应彼此的位置,以防止出现相互碰撞的情况。
48.具体地,同一层的一个机械手臂2检测与另一个机械手臂2之间的距离,并发送至控制器,当两个机械手臂2之间的距离小于或等于预设距离时,控制器会控制两个机械手臂2停止运行,以防止两个机械手臂2之间发生碰撞。
49.本发明的晶圆转移装置将多个机械手臂均单独设置,实现了机械手臂的独立运
行,避免了因半导体加工设备的多个腔室中一个腔室出现故障后,导致其他腔室无法正常运转的情况,保证了半导体加工设备的运行效率,提高了半导体加工设备的产能。晶圆转移装置上设置限位部,在晶圆转移过程中,能够实现对晶圆位置的限定,避免了设备需要重新调整晶圆位置的情况。晶圆转移装置上设置有吸附单元,在晶圆转移过程中将晶圆牢固地吸附在晶圆转移装置的承载部上,避免了在转移过程中,晶圆出现滑落的情况。
50.以上所述,仅是本发明的较佳实施例而已,并非对本发明作任何形式上的限制,虽然本发明已以较佳实施例揭露如上,然而并非用以限定本发明,任何熟悉本专业的技术人员,在不脱离本发明技术方案范围内,当可利用上述揭示的技术内容作出些许更动或修饰为等同变化的等效实施例,但凡是未脱离本发明技术方案的内容,依据本发明的技术实质对以上实施例所作的任何简单修改、等同变化与修饰,均仍属于本发明技术方案的范围内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。