1.本发明涉及收件人不在期间配送物品处理方法及其系统,更详细地,涉及如下技术思想,即,在利用配送机器人的配送系统中,当需要接收配送物品的收件人(顾客)不在时,在征得客户同意后,可将配送物品放置在规定位置。
背景技术:
2.随着人员配备和人员管理变得愈加困难、劳动力成本的上升及非对面服务的偏好增加,不同于人工配送,对于使用配送机器人的需求也逐渐增加。
3.然而,不同于现有的配送员(人),当到达配送地点时,若客户(受检人)不在,则配送机器人难以迅速灵活应对,而且,在等待客户的过程中,可按照配送物品的种类(例如,食物等)而导致配送物品的质量降低,而且,若配送机器人在一个配送地点等待的时间过长,则可对其他配送产生影响。
4.并且,即使并非不在期间,相比于直接接收配送物品,客户也更希望将配送物品放置在门前或走廊等规定场所。
5.在现有配送员直接人工配送的情况下,虽然难以发生这种问题,但是,在选定用于放置配送物品的适当位置并以防止配送物品受损状态放置的过程中,配送机器人可产生多种问题。
6.因此,如同现有的配送员,当前需要使得配送机器人可在收件人不在期间向准确位置稳定卸载配送物品的技术。
7.现有技术文献
8.专利文献
9.专利文献1:韩国授权专利10-20155994号(用于防止沥青混凝土温度降低的装载箱)。
技术实现要素:
10.技术问题
11.本发明的目的在于,提供如下的技术思想,即,可使得配送机器人在收件人不在期间向准确位置稳定卸载配送物品。
12.技术方案
13.为了实现上述技术目的,本发明实施例的收件人不在期间配送物品处理方法可包括如下步骤:配送物品处理系统确认客户终端是否对到达配送地点的配送机器人提出卸载请求;以及上述配送物品处理系统基于确认结果使得上述配送机器人在上述配送地点自动卸载配送物品,使得上述配送机器人在上述配送地点自动卸载配送物品的步骤包括如下步骤:当提出上述卸载请求时,上述配送物品处理系统使得上述配送机器人在上述配送地点自动卸载配送物品;以及当未提出上述卸载请求时,上述配送物品处理系统使得上述配送机器人在上述配送地点等待,在等待过程中与上述客户终端在规定时间内没有通信的情况
下,使得上述配送机器人在上述配送地点自动卸载配送物品。
14.并且,上述收件人不在期间配送物品处理方法还可包括如下步骤:在上述客户终端指定卸载位置的情况下,上述配送物品处理系统将指定位置确定为卸载位置;以及在上述客户终端未指定卸载位置的情况下,上述配送物品处理系统将配送地点内的任意位置确定为卸载位置。
15.并且,上述配送物品处理系统将指定位置确定为卸载位置的步骤可包括:上述配送物品处理系统通过设置在上述配送机器人的至少一个摄像头在规定范围内拍摄配送地点;向上述客户终端传输拍摄的拍摄数据;上述配送物品处理系统从上述客户终端接收上述拍摄数据内指定的卸载位置;以及上述配送物品处理系统通过将上述拍摄数据内指定的卸载位置与实际配送地点内的位置进行匹配并将匹配位置确定为卸载位置。
16.并且,上述收件人不在期间配送物品处理方法还可包括如下步骤:上述配送物品处理系统通过设置在上述配送机器人的至少一个摄像头拍摄包括卸载的配送物品的配送地点;以及向上述客户终端传输拍摄的拍摄数据。
17.上述收件人不在期间配送物品处理方法可由设置在数据处理装置的计算机程序实现。
18.为了实现上述技术目的,本发明实施例的收件人不在期间配送物品处理系统包括:通信部,与客户终端进行通信;拍摄数据获取部,用于获取由设置在配送机器人的至少一个摄像头拍摄的拍摄数据;以及控制部,用于控制上述配送机器人的功能,上述控制部执行如下步骤:在上述配送机器人到达配送地点的情况下,确认上述客户终端是否提出卸载请求;当提出上述卸载请求时,控制上述配送机器人在上述配送地点自动卸载配送物品;当未提出上述卸载请求时,使得上述配送机器人在上述配送地点等待,在等待过程中与上述客户终端在规定时间内没有通信的情况下,控制上述配送机器人在上述配送地点自动卸载配送物品;以及在卸载完上述配送物品的情况下,可通过上述拍摄数据获取部接收拍摄包括卸载的配送物品的配送地点的拍摄数据并控制上述通信部将其传输至上述客户终端。
19.并且,上述控制部可从上述客户终端确认是否指定卸载位置并基于确认结果控制上述配送机器人向指定的卸载位置或上述配送地点内的任意位置自动卸载配送物品。
20.并且,上述配送物品处理系统还包括:图像转换部,用于对上述拍摄数据执行规定的图像处理;以及位置提取部,用于从规定的图像提取卸载位置,上述配送物品处理系统可从接收拍摄配送地点的拍摄数据的上述客户终端接收指定卸载位置的图像,通过从接收的图像提取指定的卸载位置并与实际配送地点内的位置进行匹配来控制配送机器人在匹配位置卸载上述配送物品。
21.发明的效果
22.本发明具有如下效果,即,根据本发明一实施例,在利用配送机器人的配送过程中,可在收件人不在期间稳定卸载配送物品,由此,不仅减少配送机器人的等待时间来使得配送计划变得顺畅,而且,当收件人不在时,可使得配送机器人不卸载直接返回来避免收件人因未收到预支付的配送物品而引起不满,因此,可提供高满意度的配送服务。
附图说明
23.以下,为了充分理解本发明的详细说明所引用的附图而提供对于各个附图的简单
说明。
24.图1为简要示出本发明实施例的用于实现收件人不在期间配送物品处理方法的系统的结构图。
25.图2为简要示出本发明实施例的收件人不在期间配送物品处理方法的流程图。
26.图3为用于说明本发明实施例的收件人不在期间配送物品处理方法的图。
27.图4为用于说明本发明实施例的收件人不在期间配送物品处理方法的指定卸载位置的图。
28.图5及图6为用于说明本发明实施例的收件人不在期间配送物品处理方法的配送机器人的卸载系统的图。
29.图7及图8为用于说明本发明再一实施例的配送机器人的卸载系统的图。
30.图9为简要示出本发明实施例的收件人不在期间配送物品处理系统的结构图。
具体实施方式
31.本发明可施加多种变换并具有多种实施例,因此,将在附图中例示特定实施例并在本说明书中进行详细说明。但是,这并不用于将本发明限定于特定实施方式,应理解为包括本发明的思想及技术范围内的所有变换、等同技术方案及代替技术方案。在说明本发明的过程中,当判断有关公知技术的具体说明有可能混淆本发明的主旨时,将省略其详细说明。
32.虽然“第一”、“第二”等术语可用于说明多种结构要素,但是,上述结构要素并不限定于上述术语。上述术语仅用于对一个结构要素和其他结构要素进行区分。
33.在本技术中,所使用的术语仅用于说明特定实施例,并不用于限定本发明。除非在文脉上明确表示其他含义,否则单数的表达包括复数的表达。
34.应当理解的是,本说明书中的“包括”或“具有”等术语仅用于指定本说明书中所记载的特征、数字、步骤、工作、结构要素、部件或它们的组合的存在,并不预先排除一个或一个以上的其他特征、数字、步骤、工作、结构要素、部件或它们的组合的存在或附加可能性。
35.并且,在本说明书中,当表示某一结构要素向另一结构要素“传输”数据时,除上述结构要素直接向上述另一结构要素传输上述数据外,也可意味着通过至少一个其他结构要素向上述另一结构要素传输上述数据。相反,当表示某一结构要素向另一结构要素“直接传输”数据时,可意味着上述数据未经上述其他结构要素从上述某一结构要素传输于上述另一结构要素。
36.图1为简要示出本发明实施例的用于实现收件人不在期间配送物品处理方法的系统的结构图,图2为简要示出本发明实施例的收件人不在期间配送物品处理方法的流程图,图3为用于说明本发明实施例的收件人不在期间配送物品处理方法的图。
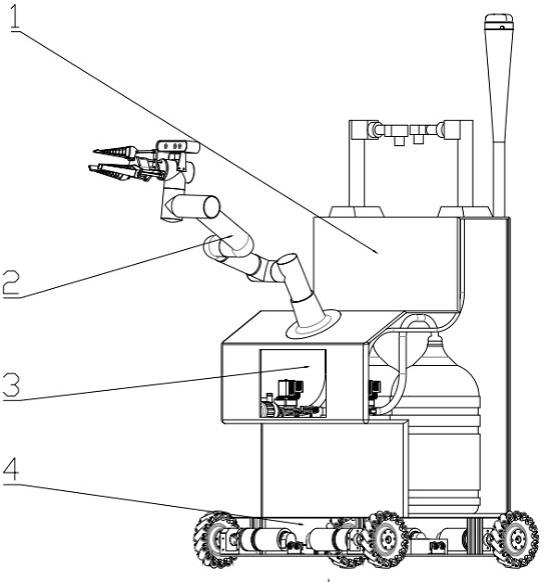
37.首先,参照图1,本发明实施例的收件人不在期间配送物品处理系统100(以下,称为配送物品处理系统)与客户终端300进行通信,可控制配送机器人200的工作及功能。
38.根据一实施例,上述配送物品处理系统100设置在上述配送机器人200,可由控制系统实现,上述控制系统用于控制上述配送机器人200的工作。
39.根据实例,代替上述配送机器人200,也可通过管理上述配送机器人200的操作系统运行的规定管理系统实现。在此情况下,上述配送物品处理系统100可由规定服务器实
现,可通过网络与上述配送机器人200和/或上述客户终端300进行通信并收发规定数据来实现本发明的技术思想。根据再一实例,上述配送物品处理系统100的部分结构设置在规定服务器,剩余部分结构也可分散设置在上述配送机器人200。即,在附图中,虽然代替上述配送机器人以一个物理结构示出了上述配送物品处理系统100,但是,根据实例,上述配送物品处理系统100的结构也可通过有线网络或无线网络与多个物理装置有机结合来实现本发明的技术思想。
40.以下,在本说明书中,虽然以上述配送物品处理系统100设置在上述配送机器人200且由控制上述配送机器人200相关工作的规定控制系统实现的情况进行说明,但是,本发明的发明要求保护范围并不限定于此。
41.上述配送物品处理系统100可通过由提供于客户终端300的规定gui(图形用户界面)菜单输入的卸载请求信号、从上述客户终端300传输的订购信息和/或用于配送请求(订购)的通话中的语音信息等确认顾客(收件人)的卸载请求。以下,在本说明书中,卸载请求可意味着用于向配送地点卸载配送物品的卸载请求,而并非收件人直接从配送机器人200接收配送物品。例如,上述卸载请求可以为“请将配送物品放在门前并联系”等请求。在配送机器人到达配送地点的到达预定时间内收件人不在的情况下,或者,收件人不期望直接面对配送员及配送机器人200而期望非对面接收的情况下,收件人可直接请求上述卸载请求。
42.根据实例,即使没有收件人的额外卸载请求,配送机器人200到达配送地点后,若收件人在规定时间内未接收配送物品或无法与收件人取得联系,则上述配送物品处理系统100可使得上述配送机器人200自动卸载所装载的配送物品。在这种情况下,上述配送物品处理系统100可基于特定条件判断当前处于收件人不在期间并向与接收卸载请求的相同配送地点卸载配送物品。例如,上述特定条件可以为如下情况,即,上述配送机器人200到达配送地点后,以无法与收件人取得联系的状态经过规定时间的情况。
43.另一方面,为了便于说明,在本说明书中,虽然以上述配送物品为食物的情况进行说明,但是,本发明并不限定于此,本发明所属技术领域的普通技术人员可轻易推导出小型快递等可通过配送机器人200配送的所有物品均能够应用于本发明的技术思想。
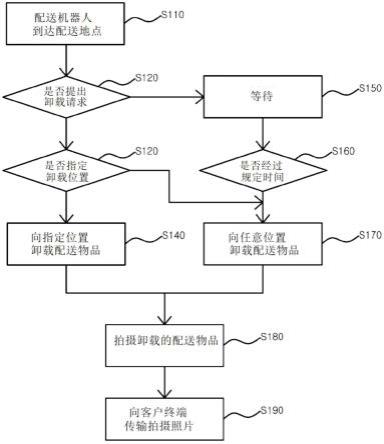
44.图2为简要示出本发明实施例的收件人不在期间配送物品处理方法的流程图,图3为用于说明本发明实施例的收件人不在期间配送物品处理方法的图。
45.参照图2及图3,配送物品处理系统100可判断配送机器人200是否到达配送地点(步骤s110)并判断收件人的客户终端300是否提出卸载请求(步骤s120)。
46.若收件人提出卸载请求,则上述配送物品处理系统100可判断是否存在收件人指定的卸载位置(步骤s130)。
47.此时,在指定卸载位置的情况下,上述配送物品处理系统100可使得上述配送机器人200向指定的卸载位置卸载配送物品(步骤s140)。
48.在未指定卸载位置的情况下,上述配送物品处理系统100可使得上述配送机器人200在上述配送地点的任意位置卸载配送物品(步骤s170)。
49.在上述步骤s120中,若没有收件人的卸载请求,则上述配送物品处理系统100可使得上述配送机器人200在配送地点等待规定时间(步骤s150)。若上述配送机器人200等待规定时间(步骤s160),则上述配送物品处理系统100判断当前处于收件人不在期间,可使得上述配送机器人200在上述配送地点的任何位置卸载配送物品(步骤s170)。
50.在任何情况下,若上述配送机器人200向配送地点卸载配送物品,则上述配送物品处理系统100可拍摄上述配送机器人200向配送地点卸载的配送物品(步骤s180)。而且,可向客户终端300传输拍摄配送物品的照片(或影像)(步骤s190)。以下,将配送机器人200拍摄的照片或影像称为拍摄数据。上述配送物品的拍摄数据可通过上述配送机器人200直接传输于上述客户终端300,也可通过上述配送物品处理系统100传输于上述客户终端300。
51.由此,收件人可通过自己的客户终端300确认传输的拍摄数据。
52.根据实例,上述配送物品处理系统100可通过规定的图像或影像处理/合成等过程对由设置在上述配送机器人200的摄像头拍摄的拍摄数据实现俯视角、鸟瞰视角等多种视角层面上的变更来向上述客户终端300提供拍摄数据。在这种情况下,上述配送机器人200可设置有能够拍摄不同方向的多个摄像头。
53.如上所述,在通过配送机器人200进行拍摄的情况下,相比于配送员用个人手机拍摄的现有方式,可具有安全层面上的优点,即使在客户的立场上,考虑到因配送员拍摄个人住所而导致萌生出陌生人持有拍摄自己家周围照片的想法,可具有提供安全感的效果。
54.并且,根据实例,可通过上述客户终端300向收件人提供上述配送机器人200的配送状况相关信息和/或配送物品相关状态信息。
55.例如,配送状况相关信息可包括配送机器人200到达配送地点的时间、到达后等待的时间、等待后卸载配送物品的时间或配送机器人200的最终返回时间等时间信息和/或上述配送机器人200到达配送地点并拍摄配送地点的拍摄数据。
56.上述配送物品相关状态信息包括在上述配送机器人200卸载配送物品的时间点上的配送物品相关温度(例如,在配送物品为食物的情况下,食物的温度)或包装状态等状态信息,可提供于收件人。
57.根据本发明的技术思想,在这种利用配送机器人200的配送服务中,当收件人不在期间或期望非对面接收时,相比于配送员提供的现有服务,可向收件人提供更多信息。
58.另一方面,根据本发明的技术思想,可通过将在配送地点卸载配送物品的位置指定为收件人所期望的位置来向收件人提供更加便利的服务。对此,以下参照图4进行说明。
59.图4为用于说明本发明实施例的收件人不在期间配送物品处理方法的指定卸载位置的图。
60.参照图4,本发明实施例的配送物品处理系统100可使得收件人(客户)直接指定配送物品的卸载位置。
61.根据一实施例,待配送机器人200到达配送地点后,在卸载配送物品之前,可向上述客户终端300传输拍摄配送地点的拍摄数据。由此,如图所示,收件人可通过自己的客户终端300从接收的拍摄数据中直接选择指定卸载位置。
62.在向客户终端300传输影像的情况下,即,当拍摄数据为影像时,所传输的影像可以为配送机器人200拍摄的实时影像,在这种情况下,收件人可实时确认配送机器人200是否到达配送地点、移动路径、卸载状态等。
63.像这样,由配送机器人200拍摄的拍摄数据可通过如上所述的规定处理过程以多种视角提供。例如,通过客户终端300向收件人提供的拍摄数据可由设置在配送机器人200的一个摄像头拍摄的视角提供,也可由设置在上述配送机器人200的能够拍摄不同方向的多个摄像头分别拍摄的拍摄数据经过规定的图像或影像处理/合成等过程变更为俯视角、
鸟瞰视角等多种视角提供。
64.在此情况下,收件人在客户终端300指定的卸载位置可显示在二维图像上,在普通二维图像的情况下,内存有基于配送机器人摄像头的二维
→
三维转换参数,因此,可从二维图像提取更加准确的卸载位置。在本说明书中,上述用于拍摄数据视点变更的合成、处理方法或从二维图像提供三维位置的技术为已知技术,因此,将省略详细说明。
65.在收件人指定卸载位置的情况下,除非在完成卸载之前产生收件人再次指定卸载位置的情况,否则以后可将相同配送地点的预指定位置存储为基本卸载位置。
66.在收件人未指定卸载位置的情况下,配送机器人200可将配送地点的任意位置设定为卸载位置。上述任意位置可在不脱离配送地点的规定范围内指定。
67.在此情况下,上述配送物品处理系统100可从上述配送机器人200拍摄配送地点的拍摄数据中提取容易卸载的位置并将所提取的位置指定为卸载位置。
68.或者,在收件人未指定卸载位置的情况下,也可基于规定条件将预设的基本位置(例如,基于门把手开启门的方向,门的左侧/右侧/正面等)指定为卸载位置并卸载配送物品。
69.另一方面,不同于通过配送员的现有方式,当配送机器人200自动卸载配送物品时,配送物品的安全卸载尤为重要。以下,将产生图5至图8说明用于其的技术思想。
70.图5及图6为用于说明本发明实施例的收件人不在期间配送物品处理方法的配送机器人的卸载系统的图。
71.参照图5及图6,在本发明实施例的配送物品处理系统100中,可在配送机器人200内置有规定的升降装置。
72.配送机器人200对于配送物品的卸载可应用多种方式。根据一例,如图3所示,在配送机器人200中,可在用于卸载配送物品的装载箱内部设置有输送带。在这种情况下,为了最大限度地减少卸载时的冲击而移动输送带并与地面维持规定水平的距离/高度后,可通过输送带向地面运输配送物品。
73.然而,在这种情况下,依然存在因通过输送带移送的配送物品接触地面而产生冲击的风险。
74.但是,在这种情况下,即使未设置有下述规定形状的配送物品包装或用于把持配送物品的额外装置,也可自动卸载,而无需考虑普通形状的包装(例如,塑料袋、纸装袋、包装箱、塑料包装材料等)或小型快递(例如,信封、邮件等)等配送物品的形状或包装材料。
75.相反,当设置有能够稳定把持配送物品并放在地面的升降装置时,不仅最大限度地减少卸载时的冲击,而且,可通过上述升降装置稳定卸载。但是,为此需要额外使用配送物品的包装或用于稳定把持/运输的升降装置,因此,可产生配送物品需要双层包装或成本增加的问题。
76.如图5所示,在设置有升降装置的情况下,将配送物品的包装本身制成托盘形状,也可在升降装置设置用于运输托盘的专用机构。
77.或者,为了稳定把持配送物品,配送物品的包装可形成对应于升降装置的形状。例如,如图6所示,在配送物品的包装规定位置形成槽,在升降装置形成与槽相对应的把持部,由此,可稳定把持配送物品来执行卸载。
78.为了从配送机器人200卸载配送物品,虽然可应用如上所述的多种方式,但是,各
个方式均有不同的优缺点。因此,可根据需求选择适当的卸载方式来提供利用配送机器人200的配送服务。
79.另一方面,根据本发明再一实施例,也可在收件人的配送地点形成用于配送机器人200的专用放置箱。在这种情况下,如图7及图8所示。
80.图7及图8为用于说明本发明再一实施例的配送机器人的卸载系统的图。
81.参照图7及图8,可设置有额外的专用放置箱,用于放置从配送机器人200卸载的配送物品。
82.虽然,这种专用放置箱存在需单独形成在配送地点的繁琐问题,但是,在因高度差而难以放置的情况下,或者,在担忧食物等配送物品状态变化的情况下,可有效利用上述专用放置箱。不同于快递箱或邮箱,上述专用放置箱可适用于配送机器人200的卸载。
83.因此,上述配送物品处理系统100可掌握在配送地点是否设置有专用放置箱。专用放置箱的设置状况可在最初设置专用放置箱时存储在相应地点设置有专用放置箱的信息,也可经由配送机器人200执行至少一次配送来掌握专用放置箱的设置状况,由此,可掌握在相应配送地点设置有专用放置箱。
84.像这样,在设置有专用放置箱的配送地点中,当收件人提出卸载请求时,或者,当需要在收件人不在期间卸载配送物品时,除非单独指定卸载位置,否则可使得上述配送机器人200向上述专用放置箱卸载配送物品。
85.上述专用放置箱可具有从配送机器人200的装载箱移送配送物品的高度相对应的高度。例如,配送机器人200的装载箱入口与上述专用放置箱的入口可形成在相同或相似的高度。
86.如上所述,在设置有专用放置箱的情况下,上述专用放置箱可包括用于内部保温的温度调节功能,或者,专用放置箱可由具备保温功能的绝热材料制成。
87.根据一例,可向专用放置箱连接电源来驱动设置在专用放置箱内部的加热器、冷却器等用于调节温度的装置。在这种情况下,专用放置箱可从配送机器人接收配送的配送物品(例如,食物)相关信息并预先调节专用放置箱内部的温度与配送物品相对应。例如,在热食物的情况下,专用放置箱内部温度可维持在规定温度以上,在冷食物的情况下,可维持在规定温度以下。在此情况下,即使收件人不在期间有所增加,也可在规定时间内维持配送物品的质量。
88.或者,如图8所示,当配送物品从上述配送机器人200放置在上述专用放置箱时,也可向上述专用放置箱内部供给上述配送机器人200的装载箱内部空气来使得上述专用放置箱内部温度调节变得更加简单。例如,在密封的装载箱内部曾装载过热食物的配送机器人200的装载箱内部温度高于常温。因此,在向专用放置箱放置配送物品的过程中,若能够一并供给高温空气,则可快速提高专用放置箱内部温度。
89.待客户(收件人)接收放置的配送物品后,上述专用放置箱可通过在内部生成风等方式减少内部温度的变化幅度,或者,也可执行消除专用放置箱内部异味等功能。
90.另一方面,图9为简要示出本发明实施例的收件人不在期间配送物品处理系统的结构图。
91.参照图9,本发明实施例的配送物品处理系统100可包括:通信部110,用于与客户终端进行通信;拍摄数据获取部120,用于接收设置在配送机器人的至少一个摄像头拍摄的
拍摄数据;和/或控制部130,用于控制上述配送机器人200的功能。根据实例,上述配送物品处理系统100还可包括:图像转换部140,用于对上述拍摄数据执行规定的图像处理;和/或位置提取部150,用于从规定的图像提取卸载位置。
92.首先,上述控制部130设置在上述配送机器人200,可执行用于实现本发明技术思想的计算及控制其他结构的功能。上述控制部130可包括处理器、存储装置及存储在上述存储装置并由上述处理器运行的程序。在本说明书中,本发明所属技术领域的普通技术人员可通过上述处理器运行上述程序来执行一系列数据处理和/或控制来轻易推导出配送机器人和/或控制部130执行规定工作。
93.上述通信部110与上述客户终端300进行通信,可收发用于实现本发明技术思想所需的各种信息、信号、数据等。例如,上述通信部110与上述客户终端300可通过3g、lte、lte-a、wi-fi、wigig、uwb(ultra wide band)等远距离无线通信方式或mst、bluetooth、nfc、rfid、zigbee、z-wave、ir等近距离无线通信方式进行通信来收发语音通话、文字消息、推送消息等或收发规定图像和/或影像等。
94.在再一实施例中,上述通信部110与上述客户终端300也可经由规定的中继服务器进行通信。在此情况下,上述通信部110与上述中继服务器及上述客户终端300与上述中继服务器可通过上述无线通信方式进行通信。
95.如上所述,上述拍摄数据获取部120可接收设置在上述配送机器人200的至少一个摄像头拍摄的拍摄数据。
96.以上述方式接收的拍摄数据可通过上述图像转换部140转换为可变更视点的图像并提供于上述客户终端300。
97.当收件人通过客户终端300从上述拍摄配送地点的拍摄数据中指定卸载位置时,上述位置提取部150接收指定卸载位置的图像并提取指定的卸载位置,可将其与实际配送地点内的位置进行匹配来提取上述配送机器人200实际卸载配送物品的位置。
98.另一方面,若上述配送机器人200到达配送地点,则上述控制部130可确认上述客户终端300是否提出卸载请求。
99.当确认结果为提出上述卸载请求时,可控制上述配送机器人200在上述配送地点自动卸载配送物品。
100.而且,当未提出上述卸载请求时,上述控制部130使得上述配送机器人200在上述配送地点等待,在等待过程中与上述客户终端300在规定时间内没有通信的情况下,可控制上述配送机器人200在上述配送地点自动卸载配送物品。
101.而且,若卸载完上述配送物品,则上述控制部130可控制上述通信部110通过上述拍摄数据获取部接收包括卸载的配送物品在内的拍摄数据并向上述客户终端300传输。
102.并且,上述控制部130可通过上述位置提取部150确认上述客户终端是否指定卸载位置并基于确认结果控制上述配送机器人200向指定的卸载位置或上述配送地点内的任意位置自动卸载配送物品。
103.为此,上述控制部130可通过上述通信部110从接收拍摄配送地点的拍摄数据的上述客户终端300接收指定卸载位置的图像,可通过上述位置提取部150从接收的图像中提取指定的卸载位置并与实际配送地点内的位置进行匹配来控制上述配送机器人200在匹配位置卸载上述配送物品。
104.上述本发明的说明仅为示例,应当理解的是,在不改变本发明的技术思想或基本特征的情况下,本发明所属技术领域的普通技术人员可通过其他实施方式轻易改变本发明。因此,以上记载的实施例在所有层面上仅为示例,不应理解为限定含义。例如,说明为单一型的各个结构要素可被分散实施,与此相同地,说明为分散的结构要素也可被结合实施。
105.本发明的范围应基于发明要求保护范围加以定义,而并非上述详细说明,从发明要求保护范围的含义、范围及其等同概念导出的所有变更或变形均属于本发明的范畴。
106.产业上的可利用性
107.本发明可用于收件人不在期间配送物品处理方法及其系统。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。