绝缘单元及机器人
1.相关申请的交叉引用
2.本技术主张于2020年4月6日向日本专利厅申请的专利申请2020-68429号的优先权,通过参照,引用其整体作为构成本技术一部分的内容。
技术领域
3.本公开涉及绝缘单元及机器人。
背景技术:
4.以往,在安装于机器人臂的末端执行器中,存在用于进行焊接作业的末端执行器。这样的末端执行器是高电压的电气设备,所以在末端执行器与机器人臂之间需要电绝缘。例如,专利文献1公开了在机器人机体主体部的前端部的最终减速器与腕法兰之间具备电绝缘部件的工业用机器人。腕法兰构成为提供机械接口,供电气设备(末端执行器)安装。
5.专利文献1:日本特开平11-114873号公报
6.例如,在专利文献1中,当在现有的机器人机体安装绝缘部件的情况下,需要腕法兰的拆卸及安装。即,需要机器人机体的构造上的变更,所以绝缘部件的安装费时费力。
技术实现要素:
7.本公开的目的在于提供一种使绝缘部件向机器人臂的安装简易的绝缘单元及机器人。
8.为了达成上述目的,本公开的一个形态所涉及的绝缘单元夹装配置于机器人臂的前端部件与安装于上述前端部件的末端执行器之间,具备:中间部件,固定于上述前端部件且能够进行上述末端执行器的安装;和绝缘部件,配置于上述中间部件与上述前端部件之间且将上述中间部件和上述前端部件之间绝缘,上述中间部件具有:至少一个第一安装孔,供将上述中间部件固定于上述前端部件的第一螺栓插入;和至少一个第二安装孔,供将上述末端执行器固定于上述中间部件的第二螺栓插入,上述第一安装孔及上述第二安装孔配置为在上述中间部件固定至上述前端部件的状态下,上述第二安装孔各自的位置与预先形成于上述前端部件的供上述末端执行器的安装用的前端安装孔各自的位置一致。
附图说明
9.图1是表示实施方式1所涉及的机器人的结构的一个例子的侧视图。
10.图2是表示实施方式1所涉及的绝缘单元的结构的一个例子的分解立体图。
11.图3是表示实施方式1所涉及的绝缘单元的结构的一个例子的侧剖视图。
12.图4是表示实施方式1所涉及的绝缘单元的变形例1的结构的一个例子的侧剖视图。
13.图5是表示实施方式1所涉及的绝缘单元的变形例2的结构的一个例子的侧剖视图。
14.图6是表示实施方式2所涉及的绝缘单元的结构的一个例子的分解立体图。
15.图7是表示实施方式2所涉及的绝缘单元的结构的一个例子的侧剖视图。
具体实施方式
16.以下,参照附图对本公开的实施方式进行说明。此外,以下说明的实施方式均表示总括或具体的例子。另外,关于以下实施方式中的结构要素中未记载于表示最上位概念的独立权利要求的结构要素,作为任意结构要素进行说明。另外,附图中的各图是示意性的图,并非一定严格地图示。并且,在各图中,存在对实质上相同的结构要素标注相同的附图标记,并省略或简化重复的说明的情况。
17.(实施方式1)
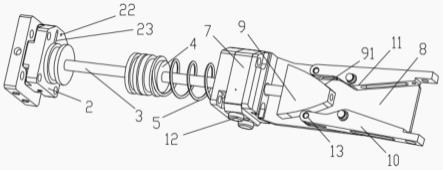
18.对实施方式1所涉及的机器人1000的结构进行说明。图1是表示实施方式1所涉及的机器人1000的结构的一个例子的侧视图。如图1所示,机器人1000具备机器人臂1、末端执行器2以及绝缘单元100。机器人臂1固定配置于已形成于地面等支承面上的设置部3的上表面上。在本实施方式中,设置部3是形成于地面且具有水平的上表面的台座,但并不限定于此,例如也可以是地面的一部分。此外,机器人臂1的设置地点并不限定于地面,也可以是任何地点,例如也可以是搁架等台座、墙壁或天花板等。
19.末端执行器2是对机器人1000的处理对象物施加作用的结构要素,安装于机器人臂1的前端。虽不限定于此,但末端执行器2是外加电压的电气设备,在本实施方式中是作为处理高电压的电气设备的一个例子的点焊枪。机器人1000使用末端执行器2对工件w进行点焊作业。末端执行器2经由绝缘单元100而安装于机器人臂1的前端。绝缘单元100安装于机器人臂1的前端,末端执行器2安装于该绝缘单元100。绝缘单元100将末端执行器2和机器人臂1之间电绝缘。
20.对机器人臂1的结构进行说明。如图1所示,机器人臂1是使末端执行器2自如移动的结构要素,具备臂主体10和基部20。基部20将臂主体10支承为能够旋转,基部20固定于设置部3的上表面上。
21.臂主体10具备:连杆11~16,从基部20朝向臂主体10的前端按顺序配置;关节jt1~jt6,依次将连杆11~16连接为能够旋转;以及臂驱动装置d1~d6,分别旋转驱动关节jt1~jt6。关节jt1~jt6是旋转关节。
22.连杆11经由关节jt1而与基部20连接。连杆16的端面亦即法兰面161a构成用于与末端执行器2连接的机械接口。在本实施方式中,法兰面161a与绝缘单元100连接,并经由绝缘单元100而与末端执行器2间接地连接。臂驱动装置d1~d6均以电力为动力源。臂驱动装置d1~d6均包括:作为驱动源的电动马达;和减速器,以降低了电动马达的旋转驱动力的旋转速度且提高了旋转驱动力的状态传递该旋转驱动力。例如,电动马达也可以是伺服马达。例如臂驱动装置d6包括电动马达m6和减速器r6。此外,臂主体10的关节的数量并不限定于6个,也可以是7个以上或5个以下。臂驱动装置d6、电动马达m6以及减速器r6是驱动装置的一个例子。
23.例如,关节jt1将连杆11的基端部以能够以与设置部3的上表面垂直的铅垂方向的旋转轴为中心地转动的方式连结于基部20。关节jt2将连杆12的基端部以能够以沿着设置部3的上表面的水平方向的旋转轴为中心地转动的方式连结于连杆11的前端部。关节jt3将
连杆13的基端部以能够以水平方向的旋转轴为中心地转动的方式连结于连杆12的前端部。关节jt4将连杆14的基端部以能够以连杆13的长度方向的轴心的旋转轴为中心地转动的方式连结于连杆13的前端部。关节jt5将连杆15的基端部以能够以与连杆14的旋转轴垂直的方向的旋转轴为中心地转动的方式连结于连杆14的前端部。关节jt6将连杆16的基端部以能够以扭转旋转轴a6为中心地转动的方式连结于连杆15的前端部。
24.如上所述的臂主体10在臂主体10能够动作的范围内,能够使连杆16的位置自如地移动至任意的三维位置,能够使连杆16的姿势自如地移动为任意的三维姿势。
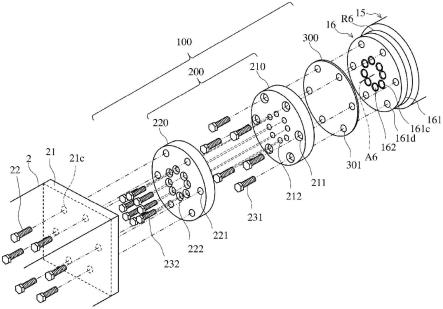
25.对绝缘单元100及绝缘单元100的周边的结构进行说明。图2是表示实施方式1所涉及的绝缘单元100的结构的一个例子的分解立体图。图3是表示实施方式1所涉及的绝缘单元100的结构的一个例子的侧剖视图。图3示出包括扭转旋转轴a6在内的剖面。如图2及图3所示,连杆16包括:前端部件161;和螺栓162,用于固定前端部件161。
26.前端部件161是构成与末端执行器2的机械接口的部件,与配置于连杆15的罩151内的减速器r6连接。
27.减速器r6包括:主体r61,在内部包括减速齿轮机构;主体r61的输出轴r62;以及端部法兰r63,与输出轴r62连接。主体r61与电动马达m6(参照图1)的旋转驱动轴连接,将从电动马达m6传递来的旋转驱动力以降低了旋转速度且提高了驱动力的状态传递至输出轴r62。输出轴r62通过上述旋转驱动力而以旋转轴a6为中心地旋转。
28.端部法兰r63以与输出轴r62一体地旋转的方式与输出轴r62的端部连接。端部法兰r63以旋转轴a6为中心地沿着端部法兰r63的周缘的周方向旋转。端部法兰r63的两个主面中的一方主面r63a从罩151露出于外部,在主面r63a形成有多个法兰固定孔r63b。在本实施方式中,各法兰固定孔r63b是能够与螺栓162螺纹拧合的内螺纹孔,但并不限定于此,也可以是单纯的孔及带有键或键槽的孔等任何孔。
29.前端部件161是板状部件,例如是圆形法兰。在前端部件161形成有多个部件固定孔161c和多个前端安装孔161d。多个部件固定孔161c是用于使用螺栓162来将前端部件161固定于端部法兰r63的孔。即,多个部件固定孔161c是用于将前端部件161固定于臂主体10的孔。在本实施方式中,部件固定孔161c的数量为8个。各部件固定孔161c是在前端部件161的两个主面161a及161b间贯通前端部件161的孔。主面161a是连杆16的法兰面。以下,适当地使用“主面161a”及“法兰面161a”这样的表达中的任意一个。
30.各部件固定孔161c在主面161a包括锪孔部分,在主面161a的附近局部地扩径。多个部件固定孔161c配置为多个部件固定孔161c各自的位置与多个法兰固定孔r63b的位置一致。
31.前端部件161配置为使主面161b与端部法兰r63的主面r63a邻接。并且,螺栓162按顺序插入至部件固定孔161c及法兰固定孔r63b,并拧入法兰固定孔r63b。由此,前端部件161能够固定于端部法兰r63,并与端部法兰r63一起以旋转轴a6为中心旋转。旋转轴a6是机器人臂1的旋转轴的一个例子。各部件固定孔161c的锪孔部分将螺栓162的头部收容为不从主面161a突出。
32.多个前端安装孔161d是用于将末端执行器2固定于前端部件161的孔。多个前端安装孔161d能够在制造机器人臂1时等机器人臂1出厂前形成于前端部件161。即,多个前端安装孔161d是预先形成于前端部件161的末端执行器2安装用的孔。在本实施方式中,前端安
装孔161d的数量为6个。各前端安装孔161d在与8个部件固定孔161c不同的位置、具体而言、相对于8个部件固定孔161c位于旋转轴a6的径向外侧的位置形成于主面161a。各前端安装孔161d从主面161a朝向主面161b延伸,但不到达主面161b。各前端安装孔161d是能够与用于固定末端执行器2的螺栓22螺纹拧合且不贯通前端部件161的内螺纹孔。此外,前端安装孔161d也可以贯通前端部件161。
33.末端执行器2包括构成为安装于前端部件161的安装部21。安装部21是板状部件,例如是法兰。在安装部21形成有多个工具安装孔21c。在本实施方式中,工具安装孔21c的数量与前端安装孔161d的数量相同,为6个。各工具安装孔21c在安装部21的两个主面21a及21b间贯通安装部21。6个工具安装孔21c配置为6个工具安装孔21c各自的位置与6个前端安装孔161d的位置一致。
34.例如末端执行器2在使安装部21的主面21b与前端部件161的主面161a邻接,且将各工具安装孔21c和各前端安装孔161d在旋转轴a6的方向对位了的状态下,配置于前端部件161。螺栓22按顺序插入至工具安装孔21c及前端安装孔161d,并拧入前端安装孔161d。由此,安装部21能够固定于前端部件161。
35.如上所述的前端部件161是臂主体10的构造部件,且是具有支承末端执行器2的强度的强度部件。并且,前端部件161是能够旋转的动作部件。这样的前端部件161由铁等金属材料形成,具有导电性。
36.绝缘单元100包括中间部件200和第一绝缘部件300。中间部件200构成为固定于前端部件161且能够进行末端执行器2的安装。第一绝缘部件300构成为配置于中间部件200与前端部件161之间且将中间部件200和前端部件161之间绝缘。
37.在本实施方式中,中间部件200包括第一中间部件210和第二中间部件220。中间部件210及220均是板状部件,在本实施方式中是圆板。
38.第一绝缘部件300由具有电绝缘性的材料形成。在本实施方式中,第一绝缘部件300是由胶木形成的板状部件,具体而言,是比中间部件210及220薄的圆板。例如,第一绝缘部件300是布胶木或纸胶木。此外,形成第一绝缘部件300的材料并不限定于胶木,也可以是具有电绝缘性的任何材料。第一绝缘部件300的结构也并不限定于板状结构,只要能够在第一绝缘部件300的两侧的部件之间实现电绝缘即可。例如第一绝缘部件300也可以为膜状。
39.在第一绝缘部件300形成有至少一个插通孔301。在本实施方式中,插通孔301的数量为两个以上,具体而言,与前端安装孔161d的数量相同,为6个。6个插通孔301配置为6个插通孔301各自的位置与6个前端安装孔161d的位置一致。
40.第一绝缘部件300、第一中间部件210以及第二中间部件220朝向沿着旋转轴a6从前端部件161远离的方向按该顺序配置。
41.在第一中间部件210形成有至少一个第一安装孔211和至少一个第三安装孔212。在本实施方式中,第一安装孔211及第三安装孔212的数量为两个以上。具体而言,第一安装孔211的数量与前端安装孔161d的数量相同,为6个,第三安装孔212的数量为8个。各第一安装孔211是用于使用螺栓231来将第一中间部件210固定于前端部件161的孔。螺栓231的公称直径及螺距等结构与螺栓22相同。各第三安装孔212是用于使用螺栓232来将第二中间部件220固定于第一中间部件210的孔。螺栓231是第一螺栓的一个例子,螺栓232是第三螺栓的一个例子。
42.各第一安装孔211在第一中间部件210的两个主面210a及210b间贯通第一中间部件210。各第一安装孔211在主面210a包括能够收容螺栓231的头部231a的锪孔部分211a,在主面210a的附近局部地扩径。6个第一安装孔211配置为6个第一安装孔211各自的位置与6个前端安装孔161d的位置一致。
43.8个第三安装孔212在与6个第一安装孔211不同的位置形成于主面210a。在本实施方式中,8个第三安装孔212相对于6个第一安装孔211配置于旋转轴a6的径向内侧的位置。各第三安装孔212从主面210a朝向主面210b延伸,但不到达主面210b。各第三安装孔212是能够与螺栓232螺纹拧合且不贯通第一中间部件210的内螺纹孔。此外,第三安装孔212也可以贯通第一中间部件210。
44.这里,绝缘单元100在各第一安装孔211内具有与第一安装孔211的内周面匹配的圆筒形状的第二绝缘部件400。第二绝缘部件400允许螺栓231的螺杆231b的插通。第二绝缘部件400配置于第一安装孔211中的除锪孔部分211a以外的部分。并且,绝缘单元100在各第一安装孔211的锪孔部分211a内,具有设为与螺栓231对应的垫圈状的形状的圆环板状的第三绝缘部件500。第三绝缘部件500允许螺栓231的螺杆231b的插通,不允许螺栓231的头部231a的插通。第二绝缘部件400及第三绝缘部件500由具有电绝缘性的材料形成,例如也可以与第一绝缘部件300同样地由胶木形成,但并不限定于此。
45.第一中间部件210在使主面210b与前端部件161的主面161a邻接,且将各第一安装孔211和各前端安装孔161d在旋转轴a6的方向对位了的状态下,配置于前端部件161。此时,第一绝缘部件300在将各插通孔301和各前端安装孔161d在旋转轴a6的方向对位了的状态下,配置于第一中间部件210与前端部件161之间。第三绝缘部件500配置于第一安装孔211的锪孔部分211a内,第三绝缘部件500、第一安装孔211的第二绝缘部件400、插通孔301以及前端安装孔161d排列成一列。并且,螺栓231的螺杆231b按顺序插入至第三绝缘部件500、第二绝缘部件400、插通孔301以及前端安装孔161d,并拧入前端安装孔161d。
46.由此,第一中间部件210以在第一中间部件210与前端部件161之间夹着第一绝缘部件300的状态固定于前端部件161。第三绝缘部件500夹装于螺栓231的头部231a与锪孔部分212a的内表面之间,将头部231a和第一中间部件210之间绝缘。第二绝缘部件400夹装于螺栓231的螺杆231b与第一安装孔211的内周面之间,将螺杆231b和第一中间部件210之间绝缘。绝缘部件400及500将螺栓231和第一中间部件210之间绝缘。第一绝缘部件300夹装于第一中间部件210与前端部件161之间,将第一中间部件210和前端部件161之间绝缘。此外,如图3所示,也可以在头部231a与第三绝缘部件500之间配置垫圈。垫圈可以减少拧入时的头部231a与第三绝缘部件500的干涉。
47.在第二中间部件220形成有至少一个第二安装孔221和至少一个第四安装孔222。在本实施方式中,第二安装孔221及第四安装孔222的数量为2个以上。具体而言,第二安装孔221的数量与前端安装孔161d的数量相同,为6个。第四安装孔222的数量与第三安装孔212的数量相同,为8个。各第二安装孔221是用于使用螺栓22来将末端执行器2固定于第二中间部件220的孔。各第四安装孔222是用于使用螺栓232来将第二中间部件220固定于第一中间部件210的孔。螺栓22是第二螺栓的一个例子。
48.各第二安装孔221形成于第二中间部件220的两个主面220a及220b中的主面220a。各第二安装孔221从主面220a朝向主面220b延伸,但不到达主面220b。各第二安装孔221是
能够与螺栓22螺纹拧合且不贯通第二中间部件220的内螺纹孔。此外,第二安装孔221也可以贯通第二中间部件220。各第二安装孔221的结构与前端安装孔161d相同。6个第二安装孔221配置为6个第二安装孔221各自的位置与6个第一安装孔211、6个前端安装孔161d以及6个工具安装孔21c的位置一致。
49.具体而言,在使用第四安装孔222及螺栓232来将第二中间部件220安装至第一中间部件210的状态、即第二中间部件220固定至第一中间部件210及前端部件161的状态下,6个第二安装孔221的位置与6个第一安装孔211及6个前端安装孔161d的位置一致。更具体而言,6个第二安装孔221各自的以旋转轴a6为中心的相位与6个第一安装孔211及6个前端安装孔161d各自的以旋转轴a6为中心的相位一致、即相同。上述相位是以旋转轴a6为中心的旋转方向上的相位。并且,6个第二安装孔221各自的距旋转轴a6的距离与6个第一安装孔211及6个前端安装孔161d各自的距旋转轴a6的距离相同。
50.即,第一安装孔211及第二安装孔221配置为在第二中间部件220固定至第一中间部件210及前端部件161的状态下,第二安装孔221各自的以旋转轴a6为中心的相位与前端安装孔161d各自的以旋转轴a6为中心的相位一致。以下,将“以旋转轴a6为中心的旋转方向上的相位”及“以旋转轴a6为中心的相位”简记为“相位”。
51.各第四安装孔222在第二中间部件220的主面220a及220b间贯通第二中间部件220。8个第四安装孔222配置为8个第四安装孔222各自的位置与8个第三安装孔212的位置一致。
52.第二中间部件220在使主面220b与第一中间部件210的主面210a邻接,且将各第四安装孔222和各第三安装孔212在旋转轴a6的方向对位了的状态下,配置于第一中间部件210。并且,螺栓232按顺序插入至第四安装孔222及第三安装孔212,并拧入第三安装孔212。由此,第二中间部件220固定于第一中间部件210。第二中间部件220仅与第一中间部件210导通,所以与前端部件161电绝缘。
53.如上所述,通过第一中间部件210、第二中间部件220以及第一绝缘部件300固定于前端部件161,而绝缘单元100安装于前端部件161。
54.另外,末端执行器2安装于已安装于前端部件161的绝缘单元100。具体而言,末端执行器2在使安装部21的主面21b与第二中间部件220的主面220a邻接,且将各工具安装孔21c和各第二安装孔221在旋转轴a6的方向对位了的状态下,配置于前端部件161。并且,螺栓22按顺序插入至工具安装孔21c及第二安装孔221,并拧入第二安装孔221。由此,安装部21固定于第二中间部件220。安装部21仅与第二中间部件220及第一中间部件210导通,所以与前端部件161电绝缘。因此,末端执行器2经由绝缘单元100而以与前端部件161电绝缘的状态安装于前端部件161。
55.第二安装孔221的结构及配置与前端部件161的前端安装孔161d的结构及配置相同。因此,各种类的末端执行器2能够与安装于前端部件161的情况同样地安装于第二中间部件220。
56.另外,在末端执行器2安装于第二中间部件220的情形亦即第一情形、与末端执行器2直接安装于前端部件161的情形亦即第二情形之间,机械接口坐标系的变化得到抑制。
57.机械接口坐标系是用于定义已安装至连杆16的末端执行器2的位置及朝向的坐标系。机械接口坐标系以供末端执行器2的安装部21安装的面亦即机械接口面为基准,例如机
械接口坐标系的原点为机械接口面与旋转轴a6的交点。该情况下,机械接口坐标系的zm轴是旋转轴a6,xm轴及ym轴是机械接口面上的轴,xm轴、ym轴以及zm轴相互正交。
58.在第一情形中,机械接口面是第二中间部件220的主面220a,在第二情形中,机械接口面是法兰面161a。6个第二安装孔221各自的相位与6个前端安装孔161d各自的相位相同,所以在第一情形与第二情形之间,机械接口坐标系的xm轴、ym轴以及zm轴的方向相同,机械接口坐标系的原点的位置在zm轴方向不同。因此,可以在第一情形与第二情形之间将机械接口坐标系的变化抑制得较小。
59.即使在通过自动操纵、手动操纵以及组合它们而成操纵中的任意一种操纵来操纵机器人臂1情况下,都在用于使末端执行器2成为所希望的位置及朝向的臂主体10的控制中,使用机械接口坐标系。在第一情形与第二情形之间,机器人臂1的控制程序中设定的机械接口坐标系的变更是仅zm轴方向上的原点位置的修改的极少的变更,或者不需要变更。例如在绝缘单元100安装于现有的机器人臂1的情况下,硬件方面及软件方面所需要的作业简易且极少。
60.在如上所述的实施方式1所涉及的绝缘单元100中,在前端部件161与第一中间部件210之间配置了第一绝缘部件300的状态下,第一中间部件210螺栓固定于前端部件161,并且第二中间部件220螺栓固定于第一中间部件210。并且,在向前端部件161的螺栓固定中,使用在机器人臂1出厂前形成于前端部件161的前端安装孔161d,不需要在前端部件161形成新的孔。并且,不需要前端部件161的装卸等臂主体10的结构上的变更。另外,中间部件210及220向前端部件161安装后的第二安装孔221的位置与前端安装孔161d的位置一致。因此,通过简易的作业,能够维持末端执行器2安装用的第二安装孔221的精度地安装绝缘单元100。另外,第一安装孔211和第二安装孔221配置于不同的部件,所以固定第一中间部件210的螺栓231和固定末端执行器2的螺栓22虽然配置于相同的相位但相互不干涉。
61.另外,在实施方式1所涉及的绝缘单元100中,如图3所示,第一绝缘部件300不比在旋转轴a6的方向da的两侧邻接、具体而言、接触的前端部件161及第一中间部件210向方向db突出。此外,方向da是前端部件161及第一中间部件210夹着第一绝缘部件300的方向,是第一方向的一个例子。方向db是与方向da交叉的方向,在实施方式中,是与方向da垂直的方向,是第二方向的一个例子。
62.然而,第一绝缘部件300的结构并不限定于上述结构。例如第一绝缘部件300在方向db也可以比前端部件161及第一中间部件210中的至少一个突出,如图4所示,也可以比前端部件161及第一中间部件210这两者都突出。此外,图4是表示实施方式1所涉及的绝缘单元100的变形例1的结构的一个例子的侧剖视图。
63.具体而言,相对于前端部件161中的在方向da与第一绝缘部件300邻接的部位、和第一中间部件210中的在方向da与第一绝缘部件300邻接的部位,第一绝缘部件300向方向db突出。并且,第一绝缘部件300也可以在第一绝缘部件300的周缘的整周的至少一部分如上述那样向方向db突出,如图4所示,也可以遍及第一绝缘部件300的周缘的整周地如上述那样向方向db突出。由此,可以抑制导电性的异物堆积于第一绝缘部件300的在方向db上的周缘而使前端部件161与第一中间部件210导通的情况。
64.另外,在第一绝缘部件300比前端部件161或第一中间部件210向方向db突出的情况下,例如也可以是:第一绝缘部件300比前端部件161和第一中间部件210中的在方向db上
的尺寸较小者向方向db突出,第一绝缘部件300不比前端部件161和第一中间部件210中的在方向db上的尺寸较大者向方向db突出。即,上述3个部件也可以构成为阶梯状。由此,也可以抑制导电性的异物堆积于第一绝缘部件300的周缘。
65.另外,在实施方式1所涉及的绝缘单元100中,如图3所示,第一绝缘部件300配置于第一中间部件210与前端部件161之间,但并不限定于此。例如,如图5所示,第一绝缘部件300也可以配置于第一中间部件210与第二中间部件220之间。图5是表示实施方式1所涉及的绝缘单元100的变形例2的结构的一个例子的侧剖视图。
66.该情况下,第二绝缘部件400配置于第二中间部件220的各第四安装孔222内,具体而言,配置于各第四安装孔222中的除锪孔部分222a以外的部分。第三绝缘部件500配置于各第四安装孔222的锪孔部分222a内,具体而言,配置于已插入至各第四安装孔222的螺栓232的头部232a与锪孔部分222a的内表面之间。
67.第一绝缘部件300的插通孔301配置于与第四安装孔222的位置一致的位置,而不是与前端安装孔161d的位置一致的位置。插通孔301的数量与第四安装孔222的数量相同,为8个。
68.第一绝缘部件300将第一中间部件210和第二中间部件220之间绝缘。
69.第二绝缘部件400将螺栓232的螺杆232b和第二中间部件220之间绝缘。
70.第三绝缘部件500将螺栓232的头部232a和第二中间部件220之间绝缘。因此,绝缘单元100能够将末端执行器2和前端部件161之间绝缘。在本变形例中,第一绝缘部件300配置于第二中间部件220与前端部件161之间,将第二中间部件220和前端部件161之间绝缘。在图5中,第一绝缘部件300在方向db不比第一中间部件210及第二中间部件220突出,但并不限定于此。第一绝缘部件300也可以在方向db比第一中间部件210及第二中间部件220中的至少一个突出。
71.另外,在实施方式1及变形例1~2中,在第一中间部件210,多个第三安装孔212相对于多个第一安装孔211配置于旋转轴a6的径向内侧的位置,在第二中间部件220,多个第四安装孔222相对于多个第二安装孔221配置于旋转轴a6的径向内侧的位置,但并不限定于此。第三安装孔212及第四安装孔222分别配置于与第一安装孔211及第二安装孔221不同的位置即可。例如第三安装孔212及第四安装孔222也可以分别相对于第一安装孔211及第二安装孔221错开相位地配置于在旋转轴a6的径向上同等的位置,或者也可以配置于径向外侧的位置。
72.(实施方式2)
73.对实施方式2所涉及的绝缘单元100a进行说明。在中间部件200a由一个部件构成这一点,实施方式2所涉及的绝缘单元100a与实施方式1不同。以下,针对本实施方式,以与实施方式1及变形例1~2不同的点为中心进行说明,适当地省略与实施方式1及变形例1~2同样的点的说明。
74.图6是表示实施方式2所涉及的绝缘单元100a的结构的一个例子的分解立体图。图7是表示实施方式2所涉及的绝缘单元100a的结构的一个例子的侧剖视图。如图6及图7所示,绝缘单元100a包括中间部件200a和第一绝缘部件300a。
75.中间部件200a是一个板状部件,在本实施方式中是圆板。在中间部件200a形成有至少一个第一安装孔211a和至少一个第二安装孔221a。在本实施方式中,第一安装孔211a
的数量为两个以上,具体而言,与前端部件161的部件固定孔161c的数量相同,为8个。第二安装孔221a的数量为2个以上,具体而言,与前端部件161的前端安装孔161d的数量相同,为6个。
76.各第一安装孔211a在中间部件200a的两个主面200aa及200ab间贯通中间部件200a。各第一安装孔211a的结构与实施方式1所涉及的第二中间部件220的第四安装孔222的结构同样。8个第一安装孔211a配置为8个第一安装孔211a各自的位置与8个部件固定孔161c的位置一致。
77.各第二安装孔221a形成于中间部件200a的主面200aa。各第二安装孔221a从主面200aa朝向主面200ab延伸,但不到达主面200ab。各第二安装孔221a是能够与螺栓22螺纹拧合且不贯通中间部件200a的内螺纹孔。各第二安装孔221a的结构与实施方式1所涉及的第二中间部件220的第二安装孔221的结构同样。
78.6个第二安装孔221a配置为6个第二安装孔221a各自的位置与6个前端安装孔161d的位置一致。具体而言,在使用第一安装孔211a及螺栓231a来将中间部件200a固定至前端部件161的状态下,6个第二安装孔221a的位置与6个前端安装孔161d的位置一致。更具体而言,6个第二安装孔221a各自的相位及距旋转轴a6的距离与6个前端安装孔161d各自的相位及距旋转轴a6的距离相同。即,第一安装孔211a及第二安装孔221a配置为在中间部件200a固定至前端部件161的状态下,第二安装孔221a各自的以旋转轴a6为中心的相位与前端安装孔161d各自的以旋转轴a6为中心的相位一致。
79.除了插通孔301a的数量及配置这一点之外,第一绝缘部件300a具有与实施方式1所涉及的第一绝缘部件300同样的结构。插通孔301a的数量与部件固定孔161c的数量相同,为8个。8个插通孔301a配置为8个插通孔301a各自的位置与8个部件固定孔161c的位置一致。
80.绝缘单元100a在各第一安装孔211a内具有与实施方式1所涉及的第二绝缘部件400同样的结构的第二绝缘部件400a。第二绝缘部件400a配置于第一安装孔211a中的除锪孔部分211aa以外的部分。并且,绝缘单元100a在各第一安装孔211a的锪孔部分211aa内具有与实施方式1所涉及的第三绝缘部件500同样的结构的第三绝缘部件500a。
81.中间部件200a在使主面200ab与前端部件161的主面161a邻接,且将各第一安装孔211a和各部件固定孔161c在旋转轴a6的方向对位了的状态下,配置于前端部件161。此时,第一绝缘部件300a在将各插通孔301a和各部件固定孔161c在旋转轴a6的方向对位了的状态下,配置于中间部件200a与前端部件161之间。此外,将前端部件161固定于端部法兰r63的螺栓162被预先从部件固定孔161c卸下。第三绝缘部件500a配置于锪孔部分211aa内,第三绝缘部件500a、第二绝缘部件400a、插通孔301a、部件固定孔161c以及法兰固定孔r63b排列为一列。螺栓231a的螺杆231ab按顺序插入至第三绝缘部件500a、第二绝缘部件400a、插通孔301a、部件固定孔161c以及法兰固定孔r63b,并拧入法兰固定孔r63b。法兰固定孔r63b用于中间部件200a及前端部件161的固定。
82.由此,中间部件200a以在中间部件200a与前端部件161之间夹着第一绝缘部件300a的状态固定于前端部件161。第三绝缘部件500a将螺栓231a的头部231aa和中间部件200a之间绝缘。第二绝缘部件400a将螺栓231a的螺杆231ab和中间部件200a之间绝缘。第一绝缘部件300a将中间部件200a和前端部件161之间绝缘。此外,如图7所示,也可以在头部
231aa与第三绝缘部件500a之间配置垫圈。
83.末端执行器2安装于已安装于前端部件161的绝缘单元100a。具体而言,末端执行器2在使安装部21的主面21b与中间部件200a的主面200aa邻接,且将各工具安装孔21c和各第二安装孔221a在旋转轴a6的方向对位了的状态下,配置于中间部件200a。并且,螺栓22按顺序插入至工具安装孔21c及第二安装孔221a,并拧入第二安装孔221a。由此,安装部21固定于中间部件200a。安装部21仅与中间部件200a导通。因此,末端执行器2经由绝缘单元100a而以与前端部件161电绝缘的状态安装于前端部件161。
84.第二安装孔221a的结构及配置与前端安装孔161d的结构及配置相同。因此,各种类的末端执行器2能够与安装于前端部件161的情况同样地安装于中间部件200a。
85.另外,在末端执行器2安装于中间部件200a的情形亦即第一情形、与末端执行器2直接安装于前端部件161的情形亦即第二情形之间,机械接口坐标系的变化得到抑制。
86.根据如上所述的实施方式2所涉及的绝缘单元100a,能够得到与实施方式1所涉及的绝缘单元100同样的效果。并且,中间部件200a由一个部件构成,所以能够减少部件件数。另外,在中间部件200a向前端部件161的螺栓固定中,使用在机器人臂1出厂前形成于前端部件161的部件固定孔161c,不需要在前端部件161形成新的孔。另外,中间部件200a向前端部件161安装后的第二安装孔221a的位置与前端安装孔161d的位置一致。另外,第一安装孔211a及第二安装孔221a分别与不同的孔亦即部件固定孔161c及前端安装孔161d对应,所以可以抑制螺栓231a与螺栓22的干涉。
87.另外,在本实施方式中,第一绝缘部件300a构成为不比在方向da的两侧邻接、具体而言、接触的中间部件200a及前端部件161向方向db突出,但并不限定于此。第一绝缘部件300a也可以比中间部件200a及前端部件161中的至少一个向方向db突出,也可以在第一绝缘部件300a的周缘的至少一部分突出。
88.(其他实施方式)
89.以上,对本公开的实施方式的例子进行了说明,但本公开并不限定于上述实施方式及变形例。即,能够在本公开的范围内进行各种变形及改进。例如,将各种变形实施于实施方式及变形例而得到的形态、以及组合不同的实施方式及变形例中的结构要素而构建的形态也包含于本公开的范围内。
90.例如在实施方式及变形例所涉及的绝缘单元中,也可以设置用于相对于前端部件161定位中间部件、绝缘部件以及末端执行器2的安装部21的定位部件。例如定位部件也可以是穿过前端部件161、中间部件、绝缘部件以及安装部21的销等棒状部件。
91.例如在绝缘单元100中,也可以是:将至少两个销插入至被形成于前端部件161的插入孔,绝缘部件300、第一中间部件210、第二中间部件220以及安装部21配置为使销穿过各自所形成的贯通孔。另外,在绝缘单元100a中,也可以是:将至少两个销插入至前端部件161的插入孔,绝缘部件300a、中间部件200a以及安装部21配置为使销穿过各自的贯通孔。由此,中间部件、绝缘部件以及安装部21相对于前端部件161在以旋转轴a6为中心的旋转方向被定位。并且,插入孔及贯通孔和销通过构成为相互紧密地嵌合而能够进行高精度的定位。销可以由具有电绝缘性的材料形成,在销具有导电性的情况下,也可以在插入孔及贯通孔与销之间配置具有电绝缘性的部件。
92.此外,也可以不构成为一个销穿过前端部件161、中间部件、绝缘部件以及安装部
21的全部,而构成为穿过一部分。例如,也可以构成为一个销仅穿过前端部件161、中间部件以及安装部21中的在旋转轴a6的方向相邻的部件,在相邻的部件分别配置销。
93.另外,在实施方式及变形例中,机器人臂1是垂直多关节型的机器人臂,但并不限定于此,也可以是能够进行末端执行器2的安装的任何机器人臂。例如,机器人臂1也可以是水平多关节型、极坐标型、圆筒坐标型、直角坐标型或者其他型式的机器人臂。
94.另外,在实施方式及变形例中,固定各部件的螺栓是金属制,具有导电性,但并不限定于此,也可以使用非导电性的螺栓。该情况下,也可以省略第二绝缘部件400及400a、以及第三绝缘部件500及500a。
95.另外,本公开的技术的各形态例列举如下。本公开的一个形态所涉及的绝缘单元夹装配置于机器人臂的前端部件与安装于上述前端部件的末端执行器之间,具备:中间部件,固定于上述前端部件且能够进行上述末端执行器的安装;和绝缘部件,配置于上述中间部件与上述前端部件之间且将上述中间部件和上述前端部件之间绝缘,上述中间部件具有:至少一个第一安装孔,供将上述中间部件固定于上述前端部件的第一螺栓插入;和至少一个第二安装孔,供将上述末端执行器固定于上述中间部件的第二螺栓插入,上述第一安装孔及上述第二安装孔配置为在上述中间部件固定至上述前端部件的状态下,上述第二安装孔各自的位置与预先形成于上述前端部件的上述末端执行器安装用的前端安装孔各自的位置一致。
96.根据上述形态,在机器人臂的前端部件与中间部件之间配置了绝缘部件的状态下,中间部件使用第一螺栓来安装于前端部件,从而绝缘部件安装于前端部件。此时,不需要前端部件的装卸等机器人臂的结构上的变更,并且中间部件的固定是螺栓固定,所以安装作业简易。并且,中间部件安装后的第二安装孔的位置与前端部件的前端安装孔的位置一致。由此,可以抑制安装至第二安装孔的情况下的末端执行器的位置及朝向与安装至前端安装孔的情况下的末端执行器的位置及朝向之间的误差。因此,通过简易的作业,就能够维持末端执行器的安装精度地将绝缘部件安装于机器人臂。
97.在本公开的一个形态所涉及的绝缘单元中,也可以是:上述前端部件能够以上述机器人臂的旋转轴为中心地旋转,上述第一安装孔及上述第二安装孔配置为在上述中间部件固定至上述前端部件的状态下,上述第二安装孔各自的以上述旋转轴为中心的相位与上述前端安装孔各自的以上述旋转轴为中心的相位一致。
98.根据上述形态,可以抑制安装至中间部件的第二安装孔的情况下的末端执行器的相位与安装至前端安装孔的情况下的末端执行器的相位之间的误差。因此,可以维持以旋转轴为中心的旋转方向上的末端执行器的安装精度。
99.在本公开的一个形态所涉及的绝缘单元中,也可以是:上述第二安装孔是能够与上述第二螺栓螺纹拧合且不贯通上述中间部件的螺纹孔。
100.根据上述形态,可以抑制第二螺栓贯通中间部件而与前端部件接触并导通。因此,能够可靠地绝缘。
101.在本公开的一个形态所涉及的绝缘单元中,也可以是:上述中间部件包括:第一中间部件,具有第三安装孔和配置为位置与上述前端安装孔一致的上述第一安装孔,且该第一中间部件固定于上述前端部件;和第二中间部件,具有配置为位置与上述第一安装孔一致的上述第二安装孔、和配置为位置与上述第三安装孔一致的第四安装孔,且该第二中间
部件固定于上述第一中间部件,上述第一螺栓为了将上述第一中间部件固定于上述前端部件而插入至上述第一安装孔及上述前端安装孔,第三螺栓为了将上述第二中间部件固定于上述第一中间部件而插入至上述第三安装孔及上述第四安装孔。
102.根据上述形态,第一中间部件通过已插入至第一安装孔和前端安装孔的第一螺栓来固定于前端部件。第二中间部件通过已插入至第四安装孔和第三安装孔的第三螺栓来固定于第一中间部件。末端执行器通过已插入至第二安装孔的第二螺栓来固定于第二中间部件。由此,能够进行利用了前端部件的前端安装孔的第一及第二中间部件的简易安装。另外,第一安装孔和第二安装孔配置于不同的部件,所以可以抑制固定第一中间部件的第一螺栓与固定末端执行器的第二螺栓的干涉。
103.在本公开的一个形态所涉及的绝缘单元中,也可以是:上述绝缘部件配置于上述第一中间部件与上述前端部件之间。
104.根据上述形态,绝缘部件通过将第一中间部件和前端部件之间绝缘,而能够将末端执行器和机器人臂之间绝缘。
105.在本公开的一个形态所涉及的绝缘单元中,也可以是:上述绝缘部件配置于上述第一中间部件与上述第二中间部件之间。
106.根据上述形态,绝缘部件配置于第一中间部件与第二中间部件之间,即,配置于第二中间部件与前端部件之间。绝缘部件将第一中间部件和第二中间部件之间绝缘,由此,将第二中间部件和前端部件之间绝缘,进而能够将末端执行器和机器人臂之间绝缘。
107.在本公开的一个形态所涉及的绝缘单元中,也可以是:上述前端安装孔是能够与上述第一螺栓螺纹拧合的螺纹孔,上述第一安装孔是贯通上述第一中间部件的孔,上述第二安装孔是能够与上述第二螺栓螺纹拧合且不贯通上述第二中间部件的螺纹孔,上述第三安装孔是能够与上述第三螺栓螺纹拧合且不贯通上述第一中间部件的螺纹孔,上述第四安装孔是贯通上述第二中间部件的孔。
108.根据上述形态,第一中间部件通过向前端安装孔的螺纹固定来固定于前端部件,第二中间部件通过向第三安装孔的螺纹固定来固定于第一中间部件,末端执行器通过向第二安装孔的螺纹固定来固定于第二中间部件。因此,各部件及末端执行器的固定作业简易。并且可以抑制各螺栓贯通第二安装孔或第三安装孔而与第一中间部件或前端部件接触。
109.在本公开的一个形态所涉及的绝缘单元中,也可以是:上述前端部件具有:上述前端安装孔;和至少一个部件固定孔,供将上述前端部件固定于上述机器人臂的螺栓插入,上述第一安装孔分别配置为位置与上述部件固定孔一致,上述第一螺栓为了将上述中间部件固定于上述前端部件而插入至上述第一安装孔及上述部件固定孔。
110.根据上述形态,中间部件通过已插入至第一安装孔和部件固定孔的第一螺栓来固定于前端部件。中间部件使用与前端安装孔不同的部件固定孔来固定于前端部件。因此,可以抑制第一螺栓与第二螺栓的干涉。
111.在本公开的一个形态所涉及的绝缘单元中,也可以是:上述第一安装孔是贯通上述中间部件的孔。
112.根据上述形态,中间部件通过第一螺栓穿过来固定于前端部件。因此,中间部件的固定作业简易。
113.在本公开的一个形态所涉及的绝缘单元中,也可以是:上述绝缘部件比在第一方
向在上述绝缘部件的两侧邻接的上述前端部件及上述中间部件中的至少一个向第二方向突出,上述第一方向是上述前端部件及上述中间部件夹着上述绝缘部件的方向,上述第二方向是与上述第一方向交叉的方向。
114.根据上述形态,绝缘部件比前端部件及中间部件中的在两侧邻接的部件中的至少一个向第二方向突出。因此,可以抑制导电性的物体堆积于绝缘部件的在第二方向上的缘而使两侧的部件导通的情况。
115.在本公开的一个形态所涉及的绝缘单元中,也可以是:上述前端部件具有构成与上述末端执行器的机械接口的面,且上述前端部件是上述机器人臂的一部分。
116.根据上述形态,绝缘单元能够夹装于构成机械接口的面与末端执行器之间,将两者之间绝缘。
117.在本公开的一个形态所涉及的绝缘单元中,也可以是:上述前端部件能够以上述机器人臂的旋转轴为中心地旋转,上述前端部件与对上述前端部件给予旋转驱动力的驱动装置连接。
118.根据上述形态,前端部件能够构成能够进行机器人臂的动作的强度部件。并且,前端部件与驱动装置连接。绝缘部件通过将这样的前端部件和末端执行器之间绝缘,而能够将末端执行器和驱动装置之间绝缘。
119.本公开的一个形态所涉及的机器人在上述机器人臂的上述前端部件具备本公开的一个形态所涉及的绝缘单元。根据上述形态,能够得到与本公开的一个形态所涉及的绝缘单元同样的效果。
120.另外,在上述中使用的序数、数量等数字全部是为了对本公开的技术具体地进行说明而例示的,本公开不受例示的数字限制。另外,结构要素间的连接关系是为了对本公开的技术具体地进行说明而例示的,实现本公开的功能的连接关系并不限定于此。
121.本公开能够在不从其本质特征的精神脱离的的情况下以各种形式实施,像这样,本公开的范围由所附的权利要求定义而不由说明书的记载定义,所以本实施方式是例示性的而不是限定性的。权利要求及处于其范围内的全部变更、或者权利要求及其范围内的等同物被权利要求所包含。
122.附图标记说明
[0123]1…
机器人臂;2
…
末端执行器;22
…
螺栓(第二螺栓);100、100a
…
绝缘单元;161
…
前端部件;161c
…
部件固定孔;161d
…
前端安装孔;200、200a
…
中间部件;210
…
第一中间部件;211、211a
…
第一安装孔;212
…
第三安装孔;220
…
第二中间部件;221、221a
…
第二安装孔;222
…
第四安装孔;231、231a
…
螺栓(第一螺栓);232
…
螺栓(第三螺栓);300、300a
…
第一绝缘部件;301、301a
…
插通孔;1000
…
机器人;d6
…
臂驱动装置(驱动装置);m6
…
电动马达(驱动装置);r6
…
减速器(驱动装置)。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。