1.本发明涉及一种机械手技术,尤其涉及一种能够以少的限制来实施工件的取出探测的机械手系统和机械手。
背景技术:
2.作为拾放(pick and place)用的机械手,已知多指把持式、电磁吸附式、真空吸附式、伯努利式这样的各种机械手。在使用这些机械手来取出如网状物等这样的片状的透气性工件的情况下,多指把持式的机械手可能由于工件没有壁厚而无法取出。对于电磁吸附式的机械手,工件被限制为磁性体。对于真空吸附式的机械手,与工件之间因漏气而无法维持真空压力,从而无法吸引工件。因而,在这样的片状的透气性工件的情况下,一般使用利用通过喷出压缩空气而产生的负压来吸引工件的伯努利式的机械手。作为与这些机械手有关的技术,后述的内容是公知的。
3.在专利文献1中,记载有一种透气性工件取出/保持装置,该透气性工件取出/保持装置利用通过从压缩空气喷出喷嘴喷出压缩空气而产生的吸引力,来以非接触的方式吸引并取出透气性工件,并且由真空吸引喷嘴对所取出的透气性工件进行真空吸引来保持该透气性工件,由此能够将多张堆叠的透气性工件逐张地取出以及能够通过真空吸引来可靠地保持透气性工件。
4.在专利文献2中,记载了以下内容:在以电磁吸附的方式使堆叠的片状磁性材料上浮并分离的分离装置中,设置涡流式厚度探测机构,该涡流式厚度探测机构在片状磁性材料的一侧端面邻近地配置用于产生高频磁场的励磁线圈,并在与片状磁性材料相向的另一侧端面邻近地配置用于检测片状磁性材料的阻抗的检测线圈。
5.在专利文献3中记载有以下内容:在光掩模的抗静电方法中,为了利用电阻测定器来对将两个导通销打入光掩模并使其到达了导电膜的情形进行监视和检测,将与电阻测定器连接的电阻检测销并列设置于吸附盘,在导通销被吸附到吸附盘时,电阻检测销与导通销电接触。
6.现有技术文献
7.专利文献
8.专利文献1:日本特开2003-54774号公报
9.专利文献2:日本特开2010-254438号公报
10.专利文献3:日本特开平11-67647号公报
技术实现要素:
11.发明要解决的问题
12.在利用机械手取出工件时,存在不能够取出工件的情况、能够取出工件但取出了多个工件的情况、能够取出工件但保持状态不良的情况等。在这样的工件的取出探测(取出个数的探测、保持状态的探测等)中,也能够使用电磁感应式传感器、图像识别传感器等,但
存在如后述的问题点,有时无法进行应用。
13.电磁感应式接触传感器产生磁场来使工件磁化,通过测定由工件产生的磁场的磁通量来进行工件的取出探测,但工件被限制为磁性体。另外,适合于具备与传感器密合性好的平面的工件,但对于存在褶皱或存在凹凸这样的密合性差的工件无法准确地进行测定。另外,关于双头型的电磁感应式非接触传感器,在n极与s极的磁体间插入工件,使工件产生涡流,并测定由涡流产生的磁场的磁通量,但工件被限制为片状的平板工件。
14.另一方面,关于摄像机等图像识别传感器,需要根据工件的形状、周围的环境来切换用于图像识别、错误判定的参数,从而变得烦杂。另外,在片状的工件的情况下,若工件在彼此的外形一致的状态下紧贴,则有时无法判断是一张工件还是多张工件。并且,图像识别传感器会使系统整体变得高价,使机械手系统高成本化。
15.因此,寻求能够以少的限制来实施工件的取出探测的机械手技术。
16.用于解决问题的方案
17.本公开的一个方式提供一种机械手系统,该机械手系统具备:吸盘,其利用流体效应来吸引导电性工件;至少三个电极,所述至少三个电极配设于吸盘;以及电气特性测定器,其测定通过该电极中的任意两个电极与工件的接触而形成的电气回路的电气特性。
18.本公开的其它方式提供一种机械手,该机械手具备:吸盘,其利用流体效应来吸引导电性工件;以及电极,其从吸盘的吸引面突出,且能够根据与工件的接触而浮起。
19.本公开的另一方式提供一种机械手,该机械手具备:吸盘,其利用流体效应来吸引导电性工件;至少三个电极,所述至少三个电极配设于吸盘;以及旋转触头,其能够将触点切换至该电极中的任意两个电极。
20.发明的效果
21.根据本公开的一个方式,机械手具备至少三个电极,由此能够探测工件的保持状态。另外,测定通过任意两个电极与工件的接触而形成的电气回路的电气特性,由此还能够探测工件的取出个数。由于通过测定电气特性来探测工件的取出,因此工件不被限制为磁性体,是导电体即可。并且,即使工件在彼此的外形一致的状态下紧贴,也能够进行工件的取出探测。因而,能够以少的限制来实施工件的取出探测(取出个数的探测、保持状态的探测等)。
22.根据本公开的其它方式,电极从吸盘突出,由此,即使是以非接触的方式保持工件的伯努利式的机械手,也能够实施工件的取出探测。另外,即使是存在褶皱或存在凹凸这样的密合性差的工件,由于电极能够依照工件形状而浮起,因此也能够以少的限制来实施工件的取出探测。
23.根据本公开的另一方式,由于旋转触头能够将触点切换至任意两个电极,因此即使电极的数量增加,也能够仅利用一个电气特性测定器来测定任意电极间的电气特性值。进而,能够以少的限制来实施工件的取出探测。
附图说明
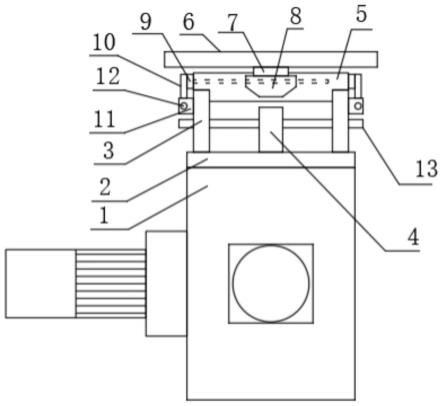
24.图1是示出一个实施方式中的机械手系统和机械手的立体图。
25.图2a是示出一个实施方式中的吸盘的底面的仰视图。
26.图2b是示出一个实施方式中的吸盘的a-a线截面的部分截面图。
27.图3a是示出具备面对面电极的吸盘的截面的部分截面图。
28.图3b是示出具备突出且能够浮起的电极的吸盘的截面的部分截面图。
29.图4是示出机械手系统的控制结构的一例的框图。
30.图5是示出电极为三个的情况下的电气回路的一例的框图。
31.图6是示出机械手系统的动作例的流程图。
32.图7是示出电极为四个的情况下的电气回路的一例的框图。
33.图8是示出电极为三个的情况下的旋转触头的结构例的俯视图。
34.图9是示出电极为三个的情况下的旋转触头的动作例的俯视图。
35.图10是示出电极为四个的情况下的旋转触头的结构例的俯视图。
36.图11是示出电极为四个的情况下的旋转触头的动作例的俯视图。
具体实施方式
37.下面,参照附图来对本公开的实施方式进行详细说明。在各附图中,对相同或类似的构成要素标注有相同或类似的附图标记。另外,下面记载的实施方式不对权利要求书中记载的发明的技术范围和用语的意义进行限定。
38.图1示出本实施方式中的机械手系统1。机械手系统1具备用于取出工件w的机械手10和将所取出的工件w向规定的位置搬送的搬送装置20。工件w是导电性工件即可,例如可以是金属制网状物等透气性工件,但也可以是触摸面板用导电性膜等非透气性工件。工件w是没有壁厚的片状的工件,但如果是比较轻量的工件,则也可以是有壁厚的工件。工件w被堆叠于载置装置50,但也可以不必被层叠。载置装置50可以是固定设置的工件贮存器,但也可以是搬送输送机、穿梭机、无人搬送车等可动的载置装置。机械手10是利用伯努利效应来吸引工件w的伯努利式的机械手,但也可以是真空吸附式的机械手。机械手10具备安装于搬送装置20的端部的掌部11和固定于掌部11且利用流体效应来吸引工件w的吸盘12。机械手10还具备电气特性测定器16和配设于吸盘12的至少三个电极13(参照图2a和图2b),该电气特性测定器16测定通过这些电极13中的任意两个电极13与工件w的接触而形成的电气回路的电气特性。搬送装置20是多关节机器人、并联杆型机器人等产业用机器人,但也可以是装载机、穿梭机、无人搬送车等搬送装置。
39.图2a示出吸盘12的底面,图2b示出图2a的吸盘12的a-a线截面。在伯努利式的机械手的情况下,吸盘12可以是具备喷出压缩空气等流体的喷嘴12a的非接触式吸盘,在真空吸附式的机械手的情况下,吸盘12可以是具备用于在与工件之间产生真空压力的喷嘴的吸附盘。在伯努利式的情况下,在喷嘴12a的侧周面等间隔地配设多个喷嘴孔12b,将压缩空气等流体从喷嘴孔12b向外周方向喷出,来使喷嘴12a的正下方产生比大气压低的负压区域,由此吸盘12以非接触的方式吸引工件。
40.电极13经由电线14与电气特性测定器16(参照图1)分别连接。电气特性测定器16测定通过任意两个电极13与工件的接触而形成的电气回路的电气特性。电气特性例如可以是电阻,但也可以是电导率、电流等。通过测定电气特性,能够探测工件的取出个数。例如在取出一张图1所示的金属制网状物的工件的情况下,电阻约为0.8ω,在两张被一起取出的情况下,电阻约为0.4ω,在三张被一起取出的情况下,电阻约为0.3ω。也就是说,张数越多,则电阻越下降(或者,电导率或电流越增大),因此能够探测工件的取出个数。
41.电极13可以沿吸盘12的周向、尤其是沿喷嘴12a的外周方向以等间隔的方式配置。通过具备至少三个电极13,能够探测工件的保持状态是否良好。例如在电极13的任何组合都能够探测到工件的情况下,能够判定为工件的保持状态良好,在电极13的一部分组合能够探测到工件的情况下,能够判定为工件的保持状态不良,在电极13的任何组合都不能够探测到工件的情况下,能够判定为未能取出工件。由于能够像这样通过测定电气特性来进行工件的取出探测(取出个数的探测、保持状态的探测等),因此工件不被限定为磁性体,而可以是导电体。另外,即使工件在彼此的外形一致的状态下紧贴,也能够进行工件的取出探测。因而,能够以少的限制来实施工件的取出探测。
42.机械手10可以还具备在吸引了工件时抑制工件的位置偏移的位置偏移抑制垫15。位置偏移抑制垫15例如可以由软质橡胶、海绵等柔软材料形成,且具备不使工件发生相对移动的表面粗糙度或高的摩擦系数。位置偏移抑制垫15的表面15a优选从吸盘12的吸引面12c突出。由此,能够在不损伤工件的情况下抑制工件相对于吸盘12的横向偏移。
43.电极13的前端可以至少从吸盘12的吸引面12c突出,或者在具备位置偏移抑制垫15的情况下,从位置偏移抑制垫15的表面15a突出。由此,即使是以非接触的方式保持工件的伯努利式的机械手,也能够实施工件的取出探测。另外,在通过吸附来保持工件的真空吸附式的机械手的情况下,也可以将电极13的前端以与吸盘12的吸引面12c或位置偏移抑制垫15的表面15a一致的方式进行定位。
44.并且,优选的是电极13能够根据与工件的接触而浮起。例如,可以是,准备用于存放电极13的电极筒13a,在电极筒13a中配置弹簧13b并通过弹簧13b对电极13施力,利用卡定构件13c将电极筒13a卡定于吸盘12的侧壁等,并使电极13从吸盘12的吸引面12c或位置偏移抑制垫15的表面15a突出。由此,根据电极13与工件的接触,电极13被弹簧13b施力的同时向吸盘12中缩回(即,浮起),从而工件与电极13及位置偏移抑制垫15这双方接触。对于存在褶皱或存在凹凸这样的密合性差的工件,电极13能够依照工件形状而浮起,因此也能够以少的限制来实施工件的取出探测。
45.图3a示出具备面对面电极13的吸盘12的一部分截面,图3b示出具备突出且能够浮起的电极13的吸盘12的一部分截面。如图3a所示,关于以与吸盘12的吸引面12c或位置偏移抑制垫的表面15a一致的方式进行了定位的电极13,电极13有时不与存在褶皱这样的工件w接触,在该情况下,无法实施工件w的取出探测。另一方面,如图3b所示,关于从吸盘12的吸引面12c或位置偏移抑制垫的表面15a突出且能够向箭头方向浮起的电极13,即使是存在褶皱或存在凹凸这样的密合性差的工件w,由于电极13能够依照工件形状而浮起,因此也能够实施工件w的取出探测。
46.图4示出机械手系统1的控制结构的一例。机械手系统1还具备控制机械手10和搬送装置20的控制装置30。控制装置30是具备cpu(central processing unit:中央处理单元)、fpga(field-programmable gate array:现场可编程门阵列)、asic(application specific integrated circuit:专用集成电路)等处理器或半导体集成电路的计算机装置。控制装置30具备:判定部31,其基于电气特性来判定工件的取出探测(取出个数的探测、保持状态的探测等);流体控制部33,其基于判定部31的判定结果来控制流体调整装置17;以及搬送控制部32,其基于判定部31的判定结果来控制搬送装置20。
47.例如判定部31可以通过任意两个电极13间的电气特性的实测值与基准值的比较
来判定工件的取出个数,并通过任意两个电极13间的电气特性的实测值与基准值的比较的组合来判定工件的保持状态是否良好。图5示出电极为三个的情况下的电气回路的一例。在该例中,机械手10具备三个电气特性测定器,第一电气特性测定器16测定电极a-b间的电气特性值(第一特性值),第二电气特性测定器16测定电极b-c间的电气特性值(第二特性值),第三电气特性测定器16测定电极c-a间的电气特性值(第三特性值)。此外,希望注意,在图5中,粗实线表示正极侧的电线,细实线表示负极侧的电线。第一特性值至第三特性值被控制装置30(判定部31)适当地读取并使用。判定部31例如可以按照下表所示的逻辑判定式,使用第一特性值至第三特性值来判定工件的取出个数、以及工件的保持状态是否良好。
48.[表1]
[0049][0050]
再次参照图4,流体控制部33可以根据由判定部31探测到的工件的取出个数来向
流体调整装置17发出流体的流压或流量的调整指令。流体调整装置17例如可以是能够调整流体的流压或流量的电磁阀,可以配设在与吸盘连接的空气管上。流体调整装置17基于流体控制部33的调整指令来调整流体的流压或流量。例如流体调整装置17可以是,在探测到取出多个的情况下,使流体的流压或流量减小,在探测到取出零个的情况下,使流体的流压或流量增大。流体调整装置17可以重复进行流压或流量的调整直到工件为一个为止。
[0051]
搬送控制部32可以根据由判定部31探测到的工件的保持状态是否良好来向搬送装置20发出工件的搬送速度的调整指令。搬送装置20基于搬送控制部32的调整指令来调整工件的搬送速度。例如搬送装置20可以是,在探测到工件的保持状态不良的情况下,使工件的搬送速度下降,在探测到工件的保持状态良好的情况下,使工件的搬送速度增加。
[0052]
图6示出机械手系统的动作例。首先,作为事先准备,按照每个工件的品种,(1)测定通过任意两个电极13与一个工件的接触而形成的电气回路的基准特性值并将其设定于控制装置30(判定部31),(2)测定吸引一个工件所需的基准流压或基准流量并将其设定于控制装置30(判定部31)。
[0053]
在步骤s10中,操作者向控制装置30输入工件的品种编号,由此控制装置30读出预先设定的基准特性值、以及基准流压或基准流量。在步骤s11中,控制装置30使搬送装置20移动到工件的上方。在步骤s12中,控制装置30使搬送装置20下降并移动到工件的取出位置。在步骤s13中,控制装置30使流体调整装置17调整为与工件的品种编号相应的基准流压或基准流量并产生吸引力。
[0054]
在步骤s14中,控制装置30基于任意两个电极13间的电气特性来判定工件的取出个数。在步骤s14中探测到取出零个的情况下,进入步骤s15,流体调整装置17使流体的流压或流量增大来提高工件的吸引力。在步骤s14中探测到取出多个的情况下,进入步骤s16,流体调整装置17使流体的流压或流量减小来降低工件的吸引力。然后,返回步骤s14,控制装置30再次基于任意两个电极13间的电气特性来判定工件的取出个数。重复进行步骤s14~步骤s16的处理直至取出一个工件为止。
[0055]
在步骤s14中探测到取出一个的情况下,进入步骤s17,控制装置30基于任意两个电极13间的电气特性的组合来判定工件的保持状态是否良好。在步骤s17中探测到保持状态不良的情况下,进入步骤s18,搬送装置20使工件的搬送速度降低,使得在搬送时不会震掉工件。在步骤s17中探测到保持状态良好的情况下,进入步骤s19,搬送装置20使工件的搬送速度增加,使得在搬送时高速地搬送工件。然后,在步骤s20中,搬送装置20向规定的位置搬送工件。此外,步骤s14的取出个数的判定和步骤s17的保持状态是否良好的判定也可以同时进行。
[0056]
图7示出电极为四个的情况下的电气回路的一例。在该例中,机械手10具备四个电气特性测定器,第一电气特性测定器16测定电极a-d间的第一特性值,第二电气特性测定器16测定电极d-c间的第二特性值,第三电气特性测定器16测定电极a-c间的第三特性值,第四电气特性测定器16测定电极a-b间的第四特性值,第五电气特性测定器16测定电极d-b间的第五特性值,第六电气特性测定器16测定电极c-b间的第六特性值。此外,希望注意,在图7中,粗实线表示正极侧的电线,细实线表示负极侧的电线。第一特性值至第六特性值被控制装置30(判定部31)适当地读取并使用。在这样的电气回路的结构中,电极的数量越多,则电气特性测定器的数量越庞大。因而,期望机械手10是能够将触点瞬时切换至任意两个电
极从而利用一个电气特性值测定器来测定电气特性值的结构(例如后述的旋转触头)。
[0057]
图8示出电极13为三个的情况下的旋转触头40的结构例。旋转触头40具备根据电极13的配置而具备规定的中心角的多个端子40a、40b。例如,在沿吸盘12的周向等间隔地配置有三个电极13的情况下,旋转触头40可以具备具有120
°
的中心角的两个端子40a、40b。此外,希望注意,在图8中,黑色的箭头表示正极侧的端子40a,灰色的箭头表示负极侧的端子40b。旋转触头40构成为,例如通过马达等驱动源(未图示)而被控制旋转角,并且将触点瞬时切换至任意两个电极13。此外,驱动源可以由控制装置30控制。
[0058]
图9示出电极13为三个的情况下的旋转触头40的动作例。例如在初始状态下,事先将旋转触头40定位为不与任何电极13接触的旋转角。在吸盘12吸引了工件时,将旋转触头40的触点切换为电极a-b间来测定电气特性值(第一特性值),接着将旋转触头40的触点切换为电极b-c间来测定电气特性值(第二特性值),接下来将旋转触头40的触点切换为电极c-a间来测定电气特性值(第三特性值)。由于旋转触头40能够像这样将触点切换至任意两个电极13,因此即使电极13的数量增加,也能够仅利用一个电气特性测定器16来测定三个特性值(第一特性值至第三特性值)。进而,能够以少的限制来实施工件的取出探测。
[0059]
图10示出电极13为四个的情况下的旋转触头40的结构例。例如,在沿吸盘12的周向等间隔地配置有四个电极13的情况下,旋转触头40可以具备具有90
°
的中心角的两个端子41a、41b和具有180
°
的中心角的两个端子42a、42b。此外,希望注意,在图10中,黑色的箭头表示正极侧的端子41a、41b,灰色的箭头表示负极侧的端子42a、42b。旋转触头40例如通过马达等驱动源(未图示)而被控制旋转角,并且将触点瞬时切换至任意两个电极13。此外,驱动源可以由控制装置30控制。
[0060]
图11示出电极13为四个的情况下的旋转触头40的动作例。例如在初始状态下,事先将旋转触头40定位为不与任何电极13接触的旋转角。在吸盘12吸引了工件时,将旋转触头40的触点切换为电极b-c间来测定电气特性值(第六特性值),接着将旋转触头40的触点切换为电极b-d间来测定电气特性值(第五特性值),接下来将旋转触头40的触点切换为电极c-d间来测定电气特性值(第二特性值),再将旋转触头40的触点切换为电极c-a间来测定电气特性值(第三特性值),接着将旋转触头40的触点切换为电极d-a间来测定电气特性值(第一特性值),接下来将旋转触头40的触点切换为电极b-d间来测定电气特性值(第五特性值),再将旋转触头40的触点切换为电极a-b间来测定电气特性值(第四特性值),接着将旋转触头40的触点切换为电极a-c间来测定电气特性值(第三特性值)。此外,在该动作例中,重复地测定了第五特性值和第三特性值,但可以以不重复的方式来控制旋转触头40的旋转角。由于旋转触头40能够像这样将触点切换至任意两个电极13,因此即使电极13的数量增加,也能够仅利用一个电气特性测定器16来测定六个特性值(第一特性值至第六特性值)。进而,能够以少的限制来实施工件的取出探测。
[0061]
根据上面的实施方式,机械手10具备至少三个电极13,由此能够探测工件的保持状态。另外,测定通过任意两个电极13与工件的接触而形成的电气回路的电气特性,由此还能够探测工件的取出个数。由于通过测定电气特性来探测工件的取出,因此工件不被限制为磁性体,是导电体即可。并且,即使工件在彼此的外形一致的状态下紧贴,也能够进行工件的取出探测。因而,能够以少的限制来实施工件的取出探测(取出个数的探测、保持状态的探测等)。
[0062]
另外,电极13从吸盘12突出,由此,即使是以非接触的方式保持工件的伯努利式的机械手,也能够实施工件的取出探测。另外,即使是存在褶皱或存在凹凸这样的密合性差的工件,由于电极13能够依照工件形状而浮起,因此也能够以少的限制来实施工件的取出探测。
[0063]
并且,由于旋转触头40能够将触点切换至任意两个电极13,因此即使电极13的数量增加,也能够仅利用一个电气特性测定器16来测定任意电极间的电气特性值。进而,能够以少的限制来实施工件的取出探测。
[0064]
此外,由上述的处理器执行的程序、用于执行上述的流程图的程序既可以记录于计算机可读取的非暂态记录介质、例如cd-rom等来被提供,或者也可以从wan(wide area network:广域网)或lan(local area network:局域网)上的服务器装置经由有线或无线来被分发并提供。
[0065]
在本说明书中对各种实施方式进行了说明,但希望认识到,本发明不限定于上述的实施方式,能够在权利要求书所记载的范围内进行各种变更。
[0066]
附图标记说明
[0067]
1:机械手系统;10:机械手;11:掌部;12:吸盘;12a:喷嘴;12b:喷嘴孔;12c:吸引面;13:电极;13a:电极筒;13b:弹簧;13c:卡定构件;14:电线;15:位置偏移抑制垫;15a:表面;16:电气特性测定器;17:流体调整装置;20:搬送装置;30:控制装置;31:判定部;32:搬送控制部;40:旋转触头;40a、40b:端子;41a、41b:端子;42a、42b:端子;50:载置装置;w:工件。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。