一种用于转运生物样本的智能化深低温冰箱agv
技术领域
1.本发明属于生物样本低温存储设备领域,尤其涉及涉及一种用于转运生物样本的智能化深低温冰箱agv。
背景技术:
2.目前深低温的生物样本存储方式多种多样,也广泛应用于医院、生物库、疫站、科研院所等机构。但是对于存取过程的样本环境无法保证温度与湿度环境,因此在设备转运、转接过程中容易造成样本的反复冻融及试管外壳霜冻的情况。
3.目前也有利用周转桶内存放样本,再由设备或者人工转运周转桶实现样本的转移。但是周转桶转接转接成本较高且转运样本数量较少,运行效率不高。
技术实现要素:
4.本发明主要解决的技术问题是提供一种用于转运生物样本的智能化深低温冰箱agv,全流程的低温与密封环境提升样本安全性,全流程的自动化可全天候作业,提高整体效率,可执行复合任务,提高样本的流量作业效率。
5.为解决上述技术问题,本发明采用的一个技术方案是:提供一种用于转运生物样本的智能化深低温冰箱agv,包括底座、冰箱本体、抓手部件以及出入库对接系统,所述冰箱本体对应固定在底座顶部,所述冰箱本体包括壳体、压缩机、蒸发器和风扇、双向自动开合门以及翻盖,所述壳体前侧顶部设置有控制触摸屏,后侧顶部设置有对接装置,所述壳体内部前侧设置有安装槽并分别安装有压缩机、蒸发器和风扇,所述壳体内部后侧设置有样品存放区和转运区,所述样品存放区和转运区通过双向自动开合门分隔,所述壳体顶部后侧设置有与转运区对应的翻盖,所述抓手部件设置于转运区分别与样品存放区和出入库对接系统对应。
6.在本发明一个较佳实施例中,所述底座为agv智能搬运机器人或amr自主移动机器人,导航采用slam 二维码组合形式。
7.在本发明一个较佳实施例中,所述样品存放区叠放设置有10-15组试管架,且任一所述试管架底部通过定位板定位支撑。
8.在本发明一个较佳实施例中,所述抓手部件包括纵向直线模组、旋转模组以及多级伸缩爪。
9.在本发明一个较佳实施例中,所述纵向直线模组纵向固定在转运区一侧,所述旋转模组水平设置于纵向直线模组的升降端,所述多级伸缩爪水平设置于旋转模组上。
10.在本发明一个较佳实施例中,所述出入库对接系统包括滑移密封门、对接通道、弹性自适应挡板和密封条。
11.在本发明一个较佳实施例中,所述对接通道水平连通设置于壳体后侧的转运区顶部,所述滑移密封门纵向移动设置于转运区与对接通道对应密封,所述对接通道外侧通过环形设置的弹性自适应挡板连接设置有密封条。
12.本发明的有益效果是:本发明指出的一种用于转运生物样本的智能化深低温冰箱agv,全流程的低温与密封环境提升样本安全性,全流程的自动化可全天候作业,提高整体效率,可执行复合任务,提高样本的流量作业效率。
附图说明
13.为了更清楚地说明本发明实施例中的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其它的附图,其中:图1是本发明一种用于转运生物样本的智能化深低温冰箱agv一较佳实施例的立体图;图2是本发明一种用于转运生物样本的智能化深低温冰箱agv一较佳实施例的局部剖视图;图3是本发明一种用于转运生物样本的智能化深低温冰箱agv一较佳实施例的出入库对接系统对接的剖视图。
具体实施方式
14.下面将对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅是本发明的一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其它实施例,都属于本发明保护的范围。
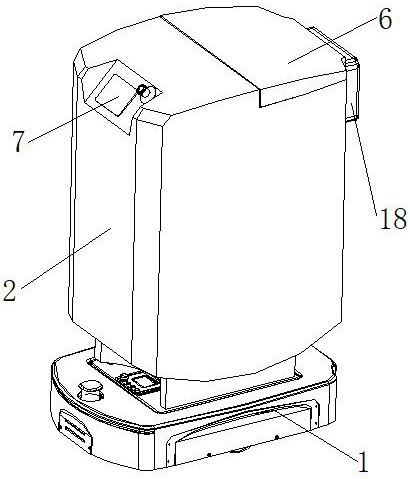
15.请参阅图1结合图2-图3所示,本发明实施例包括:一种用于转运生物样本的智能化深低温冰箱agv,包括底座1、冰箱本体、抓手部件以及出入库对接系统。
16.其中,所述冰箱本体对应固定在底座1顶部,所述底座1为agv智能搬运机器人或amr自主移动机器人,导航采用slam 二维码组合形式,定位精准,自动转接方便。
17.所述冰箱本体包括壳体2、压缩机3、蒸发器和风扇4、双向自动开合门5以及翻盖6。
18.所述壳体2前侧顶部设置有控制触摸屏7,方便设定相关参数,后侧顶部设置有对接装置,用以与其他设备对接口8对接。
19.所述壳体2内部前侧设置有安装槽9并分别安装有压缩机3、蒸发器和风扇4,采用上述组件形成制冷组件,温度可以控制在-40~-80℃的深低温区,可以有效保证样本安全。
20.所述壳体2内部后侧设置有样品存放区10和转运区11,所述样品存放区10和转运区11通过双向自动开合门5分隔,所述样品存放区10即为深低温区,叠放设置有10-15组试管架12,且任一所述试管架12底部通过定位板13定位支撑,用以方便叠放。双向自动开合门5用于保持样品存放区10内部低温,待有抓取任务指令时,门自动打开,抓取任务结束后自动关闭。同时,可携带多组试管架12一次对接执行多个任务样本,对于作业流量较大的场合,可提高效率节省设备投资。
21.所述壳体2顶部后侧设置有与转运区11对应的翻盖6,用以方便存放样品至样品存放区10。
22.所述抓手部件设置于转运区11分别与样品存放区10和出入库对接系统对应,用以将样品存放区10的样品抓取并通过出入库对接系统送至其他设备对接口8。
23.所述抓手部件包括纵向直线模组14、旋转模组15以及多级伸缩爪16。
24.所述纵向直线模组14纵向固定在转运区11一侧,用以提供纵向移动的驱动。所述旋转模组15水平设置于纵向直线模组14的升降端,用以提供水平旋转的驱动。所述多级伸缩爪16水平设置于旋转模组15上,多级伸缩爪16可匹配方盒及sbs多种试管架12的抓取。借助于多级伸缩爪16的伸缩距离接近于2倍的本体长度,可直接从样品存放区10内部抓取试管架12转接到其他设备内部(比如冰箱、挑管机),无需其他过渡转接设备,调高作业效率。
25.所述出入库对接系统包括滑移密封门17、对接通道18、弹性自适应挡板19和密封条20。
26.所述对接通道18水平连通设置于壳体2后侧的转运区11顶部,所述滑移密封门17纵向移动设置于转运区11与对接通道18对应密封,在无任务时候保持关闭状态,保证内部冷量不外泄。所述对接通道18外侧通过环形设置的弹性自适应挡板19连接设置有密封条20,当底座1靠近其他转接设备时,密封条20在弹性自适应挡板19作用下会紧贴设备表面,从而使得外部空气无法进入,此时其他设备对接口8的设备端密封门21翻入对接通道18,双向自动开合门5自动打开,抓手部件对样品可进行存取作业。
27.综上所述,本发明指出的一种用于转运生物样本的智能化深低温冰箱agv,全流程的低温与密封环境提升样本安全性,全流程的自动化可全天候作业,提高整体效率,可执行复合任务,提高样本的流量作业效率。
28.以上所述仅为本发明的实施例,并非因此限制本发明的专利范围,凡是利用本发明说明书内容所作的等效结构或等效流程变换,或直接或间接运用在其它相关的技术领域,均同理包括在本发明的专利保护范围内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。
