1.本发明涉及盾构隧道技术领域,具体地说涉及一种富水复杂地层盾构隧道掌子面破坏模式试验装置及方法。
背景技术:
2.随着我国城市地铁建设的快速发展、盾构隧道施工经验的持续积累,盾构技术随之不断强化,采用复合式盾构机进行盾构施工也越来越多的应用于上软下硬地层中。与均一地层相比,在“软硬不均”的地层中进行盾构掘进,施工普遍存在较大难度。以砂层-泥质粉砂岩复合地层为例,在这种地层进行盾构隧道施工,上部的粗颗粒土需要较大的掌子面支撑压力以满足稳定性要求,而下部的泥质粉砂岩,因自稳能力高,需要的掌子面支撑压力小,若遇到较大的压力则容易出现刀盘磨损、渣土高温失水而出现结泥饼等现象。
3.在现有技术中,对掌子面失稳的研究多局限于均质地层的盾构隧道掌子面稳定性分析,然而在实际工程中,隧道盾构难免会穿越复杂地层,其掌子面破坏模式则有待进一步明确。在公开号为cn 113432997 a提出的越江海盾构隧道掌子面土体三维破坏模式测试装置及方法中,虽然已经针对渗流情况下的地层对于盾构隧道掌子面土体变形及土压力的影响机理进行了测试评估,但是该测评系统不够全面和直观,既缺乏对于复杂地层及施工环境的多层变量因素考虑,又较难直接清晰显示出随试验的进展地层内部土体的变化。
技术实现要素:
4.本发明所要解决的技术问题是提供一种更加全面直观的富水复杂地层盾构隧道掌子面破坏模式试验装置及方法。
5.为了解决上述技术问题,本发明采用如下技术方案:富水复杂地层盾构隧道掌子面破坏模式试验装置,包括模型组单元、上部加载单元和盾构驱动单元;
6.所述模型组单元包括试验箱模型和隧道模型,所述试验箱模型由多块透明玻璃板密接拼装呈截面为矩形的不封顶式箱体结构,所述试验箱模型内的下部和上部依次填筑有泥质粉砂岩层和砾砂层,所述试验箱模型的一侧面并贴近背部的位置处开设有呈半圆形的掘进口,所述隧道模型呈截面为半圆形的半包围式弧形拱板结构,所述隧道模型置于所述试验箱模型内,并位于所述砾砂层和泥质粉砂岩层的分界线位置处,所述隧道模型的侧端焊接连通至所述掘进口,所述隧道模型的开口端抵触至背面的所述透明玻璃板;
7.所述上部加载单元包括水平加载梁、土压千斤顶和砼压层,所述砼压层压覆在所述砾砂层的顶部,所述砼压层上均匀开设有多个用于注入含有色荧光剂测试液的注水孔,所述土压千斤顶固定在所述水平加载梁的底部,并抵压至所述砼压层;
8.所述盾构驱动单元架设在所述试验箱模型设有所述掘进口的一侧,并穿过所述掘进口顶进至所述隧道模型内。
9.进一步地,所述上部加载单元还包括直线导轨柱,所述直线导轨柱具有多根,分别立于所述试验箱模型的四角,所述水平加载梁位于所述试验箱模型的上方,所述水平加载
梁与所述直线导轨柱滑动装配,所述土压千斤顶具有多个,呈阵列结构均匀固定在所述水平加载梁的底部。
10.进一步地,所述透明玻璃板采用有机防腐材质,相邻两块所述透明玻璃板的接边位置处固定有角钢包边,侧面的所述透明玻璃板上可拆卸安装有与所述掘进口吻合匹配的封口板,所述隧道模型采用不锈钢材质,所述隧道模型的开口朝向所述试验箱模型的背面,所述隧道模型的拱顶朝向所述试验箱模型的正面,所述隧道模型的截面长度小于所述试验箱模型的截面长度。
11.进一步地,所述盾构驱动单元包括反力架、水平千斤顶、支撑架、顶进杆和掘进挡板,所述反力架立于所述试验箱模型的侧端,并与所述隧道模型保持在同一水平线上,所述水平千斤顶具有多个,分别横向固定在所述反力架与所述支撑架之间,所述顶进杆横向固定在所述支撑架上,且顶部插接至所述掘进挡板的顶撑槽内,所述掘进挡板可穿过所述掘进口顶进至所述隧道模型内。
12.进一步地,所述掘进挡板采用截面呈半圆形的透明有机玻璃板,所述掘进挡板的外圈围设有密封胶圈,所述隧道模型的内壁面固定贴覆有防水密封层,所述掘进挡板与所述隧道模型滑动吻合匹配。
13.进一步地,所述模型组单元还包括注射管和渣土改良层,所述渣土改良层预设在所述隧道模型内靠近所述掘进口的位置处,所述掘进挡板沿所述隧道模型向内推进所述渣土改良层,将所述隧道模型内的所述砾砂层、泥质粉砂岩层向前盾构掘进,所述渣土改良层的截面与所述掘进挡板的截面大小吻合,所述掘进挡板上沿外弧边均匀间隔分布有多个透水孔,所述注射管穿过任一所述透水孔插入所述渣土改良层内,用于向所述渣土改良层注射土体改良剂。
14.进一步地,还包括无线采集单元,所述无线采集单元包括位移传感器、土压传感器和孔隙水压传感器,所述位移传感器、土压传感器和孔隙水压传感器均具有多个,分别间隔埋设于所述砾砂层与所述泥质粉砂岩层内。
15.进一步地,所述无线采集单元还包括土压力盒,所述土压力盒安装在位于所述掘进挡板正面的安装槽内,所述隧道模型内不设有所述位移传感器或所述土压传感器或所述孔隙水压传感器。
16.进一步地,还包括测试单元,所述测试单元包括摄像机模组、紫外线模组、泛光灯和计算机,所述摄像机模组与所述紫外线模组并排架设于所述试验箱模型的背面,并均朝向所述试验箱模型和隧道模型内的土层,所述泛光灯架设于所述摄像机模组、紫外线模组的背后,并朝向所述试验箱模型,所述摄像机模组和紫外线模组分别经由数据传输线连接至所述计算机,所述无线采集单元无线连接至所述计算机。
17.富水复杂地层盾构隧道掌子面破坏模式试验方法,包括以下步骤:
18.s1:布置所述模型组单元:所述试验箱模型内的土样以占所述隧道模型开挖面土层不同比例划分,下部填筑所述泥质粉砂岩层,上部填筑砾砂层,并在所述隧道模型的内部且贴近所述掘进口的位置处预填渣土改良层,同时,围绕所述隧道模型分别在所述砾砂层和泥质粉砂岩层内预埋多个均无线连接至所述计算机的所述位移传感器、土压传感器和孔隙水压传感器,且保持同一断面上的各传感器间隔分布;
19.s2:按照上述试验装置的要求分别在所述试验箱模型的上方、侧面、背面依次布置
上部加载单元、盾构驱动单元和测试单元;
20.s3:启动所述水平千斤顶,经由所述顶进杆驱动所述掘进挡板从所述掘进口顶进至所述隧道模型内,模拟在所述隧道模型内的盾构开挖,并通过调节而改变顶进力度大小,同时,在掘进的过程中通过所述注射管向所述渣土改良层内补充土体改良剂;
21.s4:启动所述直线导轨柱上的电动直线导轨模块,驱动所述水平加载梁下压所述土压千斤顶,所述土压千斤顶同步下推所述砼压层,模拟向所述试验箱模型内的土体施加压力或者卸载压力,并通过调节而改变下压土体的荷载压力大小;
22.s5:将含有色荧光剂的测试液从所述注水孔内注入至所述试验箱模型内的土体之中,利用所述紫外线模组照射土体,同时,所述摄像机模组自所述掘进挡板顶进至所述隧道模组内起,即开始拍摄记录,对所述试验箱模型和隧道模组内的土体破坏模式、含有色荧光剂测试液的流向自动进行摄像,并将视频数据上传至所述计算机中进行piv图像分析,一方面,观察并检测所述隧道模型掌子面受到所述盾构驱动单元的主动破坏程度、所述上部加载单元的被动破坏程度,另一方面,观察并检测荧光剂在土体内不同位置的含量,判断测试液的渗流方向及流量;
23.s6:随着所述上部加载单元的下压作业及所述盾构驱动单元的掘进作业的开展,所述位移传感器、土压传感器、孔隙水压传感器和土压力盒分别实时采集并及时向所述计算机传送测得的试验数据,所述计算机结合视频数据进行模拟比对、分析处理,得到所述隧道模型掌子面的位移——荷载曲线变化规律图,判断掌子面极限支护力;
24.s7:待所述掘进挡板掘进至所述隧道模型内的预设位置,停止所述上部加载单元和盾构驱动单元,重置所述试验箱模型内的布局,重复上述s-s,得到准确可靠的试验结果,真实全面模拟不同施工工环境下对盾构隧道掌子面的水、土压力以及三维土体破坏模式的影响。
25.本发明的有益效果体现在:
26.本发明中,针对不同上部加载压力、不同推进力、不同地层占比、不同水位、不同覆土厚度等一种或多种因素,全面真实地模拟隧道掌子面主动破坏及被动破坏的失稳情况,配合荧光剂示踪的方法检测地下水渗流作用路径,直观清晰地展示富水复杂地层盾构隧道时土体变化,不仅试验操作简单、易于实现,而且便于研究施工相关机理,丰富了富水复杂地层盾构隧道掌子面土体三维破坏模式及评估掌子面土压力的理论研究,为城市地铁施工的高效安全进行提供了更加全面直观、真实可靠的科学依据。
附图说明
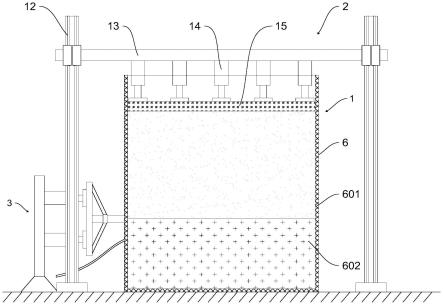
27.图1是本发明一实施例的试验装置整体结构正视图。
28.图2是本发明一实施例的盾构驱动单元顶进至模型组单元内的背面透视图。
29.图3是本发明一实施例的模型组单元与测试单元的侧面透视图。
30.图4是本发明一实施例的掘进挡板的正视图。
31.附图中各部件的标记为:1、模型组单元;2、上部加载单元;3、盾构驱动单元;4、无线采集单元;5、测试单元;6、试验箱模型;601、角钢包边;602、透明玻璃板;603、掘进口;604、封口板;7、隧道模型;701、防水密封层;8、注射管;9、砾砂层;10、泥质粉砂岩层;11、渣土改良层;12、直线导轨柱;13、水平加载梁;14、土压千斤顶;15、砼压层;1501、注水孔;
1502、钢筋;16、反力架;17、水平千斤顶;18、支撑架;19、顶进杆;20、掘进挡板;2001、安装槽;2002、顶撑槽;2003、透水孔;2004、密封胶圈;21、位移传感器;22、土压传感器;23、孔隙水压传感器;24、土压力盒;25、摄像机模组;26、紫外线模组;27、泛光灯;28、计算机。
具体实施方式
32.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明的一部分实施例,而不是全部的实施例。需要说明,若本发明实施例中有涉及方向性指示(诸如上、下、左、右、前、后
……
),则该方向性指示仅用于解释在某一特定姿态(如附图所示)下各部件之间的相对位置关系、运动情况等,如果该特定姿态发生改变时,则该方向性指示也相应地随之改变;本发明涉及到的元器件设备及模块均为现有技术,可通过购买的途径得到。
33.参见图1-图4。
34.本发明提供了富水复杂地层盾构隧道掌子面破坏模式试验装置,包括模型组单元1、上部加载单元2和盾构驱动单元3;
35.所述模型组单元1包括试验箱模型6和隧道模型7,所述试验箱模型6由多块透明玻璃板602密接拼装呈截面为矩形的不封顶式箱体结构,所述试验箱模型6内的下部和上部依次填筑有泥质粉砂岩层10和砾砂层9,所述试验箱模型6的一侧面并贴近背部的位置处开设有呈半圆形的掘进口603,所述隧道模型7呈截面为半圆形的半包围式弧形拱板结构,所述隧道模型7置于所述试验箱模型6内,并位于所述砾砂层9和泥质粉砂岩层10的分界线位置处,所述隧道模型7的侧端焊接连通至所述掘进口603,所述隧道模型7的开口端抵触至背面的所述透明玻璃板602;
36.所述上部加载单元2包括水平加载梁13、土压千斤顶14和砼压层15,所述砼压层15压覆在所述砾砂层9的顶部,所述砼压层15上均匀开设有多个用于注入含有色荧光剂测试液的注水孔1501,所述土压千斤顶14固定在所述水平加载梁13的底部,并抵压至所述砼压层15;
37.所述盾构驱动单元3架设在所述试验箱模型6设有所述掘进口603的一侧,并穿过所述掘进口603顶进至所述隧道模型7内。
38.本发明中,针对不同上部加载压力、不同推进力、不同地层占比、不同水位、不同覆土厚度等一种或多种因素,全面真实地模拟隧道掌子面主动破坏及被动破坏的失稳情况,配合荧光剂示踪的方法检测地下水渗流作用路径,直观清晰地展示富水复杂地层盾构隧道时土体变化,不仅试验操作简单、易于实现,而且便于研究施工相关机理,丰富了富水复杂地层盾构隧道掌子面土体三维破坏模式及评估掌子面土压力的理论研究,为城市地铁施工的高效安全进行提供了更加全面直观、真实可靠的科学依据。
39.在一实施例中,所述上部加载单元2还包括直线导轨柱12,所述直线导轨柱12具有多根,分别立于所述试验箱模型6的四角,所述水平加载梁13位于所述试验箱模型6的上方,所述水平加载梁13与所述直线导轨柱12滑动装配,所述土压千斤顶14具有多个,呈阵列结构均匀固定在所述水平加载梁13的底部。这样设计,启动所述直线导轨柱12上的电动直线导轨模块,驱动所述水平加载梁13下压所述土压千斤顶14,所述土压千斤顶14同步下推所述砼压层15,模拟向所述试验箱模型6内的土体施加压力或者卸载压力,并通过调节而改变
下压土体的荷载压力大小,可实现对所述试验箱模型6内土体施加多级荷载,真实模拟实际施工过程中的路面荷载。
40.在一实施例中,所述砼压层15的内部均匀间隔穿设有多根钢筋1502。这样设计,有助于提高所述砼压层15的整体结构硬度和强度,防止被压碎。
41.在一实施例中,所述透明玻璃板602采用有机防腐材质,相邻两块所述透明玻璃板602的接边位置处固定有角钢包边601,侧面的所述透明玻璃板602上可拆卸安装有与所述掘进口603吻合匹配的封口板604,所述隧道模型7采用不锈钢材质,所述隧道模型7的开口朝向所述试验箱模型6的背面,所述隧道模型7的拱顶朝向所述试验箱模型6的正面,所述隧道模型7的截面长度小于所述试验箱模型6的截面长度。这样设计,所述角钢包边601可增强所述试验箱模型6的结构强度,在试验过程中,试验人员透过所述透明玻璃板602即可直接清晰地观察到所述试验箱模型6、隧道模型7内的土体随着盾构掘进作业开展而发生的变化情况,在试验开始时,拆卸下所述封口板604即可,反之,在试验完毕后,安装上所述封口板604即可。
42.在一实施例中,所述盾构驱动单元3包括反力架16、水平千斤顶17、支撑架18、顶进杆19和掘进挡板20,所述反力架16立于所述试验箱模型6的侧端,并与所述隧道模型7保持在同一水平线上,所述水平千斤顶17具有多个,分别横向固定在所述反力架16与所述支撑架18之间,所述顶进杆19横向固定在所述支撑架18上,且顶部插接至所述掘进挡板20的顶撑槽2002内,所述掘进挡板20可穿过所述掘进口603顶进至所述隧道模型7内。这样设计,启动所述水平千斤顶17,经由所述顶进杆19驱动所述掘进挡板20从所述掘进口603顶进至所述隧道模型7内,模拟在所述隧道模型7内的盾构开挖,并通过调节而改变顶进力度大小,实现所述盾构驱动单元3对所述隧道模型7掌子面的主动破坏。
43.在一实施例中,所述掘进挡板20采用截面呈半圆形的透明有机玻璃板,所述掘进挡板20的外圈围设有密封胶圈2004,所述隧道模型7的内壁面固定贴覆有防水密封层701,所述掘进挡板20与所述隧道模型7滑动吻合匹配。这样设计,在试验过程中,所述掘进挡板20不会遮挡试验人员对所述隧道模型7内部的观察视线,所述密封胶圈2004与所述防水密封层701配合使用,有效防止测试过程中出现渣土从边缘渗漏的情况。
44.在一实施例中,所述模型组单元1还包括注射管8和渣土改良层11,所述渣土改良层11预设在所述隧道模型7内靠近所述掘进口603的位置处,所述掘进挡板20沿所述隧道模型7向内推进所述渣土改良层11,将所述隧道模型7内的所述砾砂层9、泥质粉砂岩层10向前盾构掘进,所述渣土改良层11的截面与所述掘进挡板20的截面大小吻合,所述掘进挡板20上沿外弧边均匀间隔分布有多个透水孔2003,所述注射管8穿过任一所述透水孔2003插入所述渣土改良层11内,用于向所述渣土改良层11注射土体改良剂。这样设计,在掘进的过程中通过所述注射管8向所述渣土改良层11内补充土体改良剂,通过所述渣土改良层11传递压力,土体改良剂用于改善土体的流塑性和开挖面的稳定性。
45.在一实施例中,还包括无线采集单元4,所述无线采集单元4包括位移传感器21、土压传感器22和孔隙水压传感器23,所述位移传感器21、土压传感器22和孔隙水压传感器23均具有多个,分别间隔埋设于所述砾砂层9与所述泥质粉砂岩层10内。这样设计,随着所述上部加载单元2的下压作业及所述盾构驱动单元3的掘进作业的开展,所述位移传感器21、土压传感器22、孔隙水压传感器23分别实时采集并及时向所述计算机28传送测得的试验数
据,所述计算机28经过模拟比对、分析处理,得到关于不同上部加载压力、不同推进力、不同地层占比、不同水位、不同覆土厚度等一种或多种因素的影响下,隧道掌子面主动破坏及被动破坏的失稳情况。
46.在一实施例中,所述无线采集单元4还包括土压力盒24,所述土压力盒24安装在位于所述掘进挡板20正面的安装槽2001内,所述隧道模型7内不设有所述位移传感器21或所述土压传感器22或所述孔隙水压传感器23。这样设计,所述土压力盒24实时采集并及时向所述计算机28传送所述掘进挡板20在盾构隧道过程中承受的土压,得到所述隧道模型7掌子面的位移——荷载曲线变化规律图,判断掌子面极限支护力。
47.在一实施例中,还包括测试单元5,所述测试单元5包括摄像机模组25、紫外线模组26、泛光灯27和计算机28,所述摄像机模组25与所述紫外线模组26并排架设于所述试验箱模型6的背面,并均朝向所述试验箱模型6和隧道模型7内的土层,所述泛光灯27架设于所述摄像机模组25、紫外线模组26的背后,并朝向所述试验箱模型6,所述摄像机模组25和紫外线模组26分别经由数据传输线连接至所述计算机28,所述无线采集单元4无线连接至所述计算机28。这样设计,将含有色荧光剂的测试液从所述注水孔1501内注入至所述试验箱模型6内的土体之中,利用所述紫外线模组26照射土体,同时,所述摄像机模组25自所述掘进挡板20顶进至所述隧道模组7内起,即开始拍摄记录,对所述试验箱模型6和隧道模组7内的土体破坏模式、含有色荧光剂测试液的流向自动进行摄像,并将视频数据上传至所述计算机28中进行piv图像分析,一方面,观察并检测所述隧道模型7掌子面受到所述盾构驱动单元3的主动破坏程度、所述上部加载单元2的被动破坏程度,另一方面,观察并检测荧光剂在土体内不同位置的含量,判断测试液的渗流方向及流量,若图像结果过于粗糙,则通过调整所述泛光灯27的位置及光照角度,反复试验,直至得到清晰理想的分析结果。
48.富水复杂地层盾构隧道掌子面破坏模式试验方法,包括以下步骤:
49.s1:布置所述模型组单元1:所述试验箱模型6内的土样以占所述隧道模型7开挖面土层不同比例划分,下部填筑所述泥质粉砂岩层10,上部填筑砾砂层9,并在所述隧道模型7的内部且贴近所述掘进口603的位置处预填渣土改良层11,同时,围绕所述隧道模型7分别在所述砾砂层9和泥质粉砂岩层10内预埋多个均无线连接至所述计算机28的所述位移传感器21、土压传感器22和孔隙水压传感器23,且保持同一断面上的各传感器间隔分布;
50.s2:按照上述试验装置的要求分别在所述试验箱模型6的上方、侧面、背面依次布置上部加载单元2、盾构驱动单元3和测试单元5;
51.s3:启动所述水平千斤顶17,经由所述顶进杆19驱动所述掘进挡板20从所述掘进口603顶进至所述隧道模型7内,模拟在所述隧道模型7内的盾构开挖,并通过调节而改变顶进力度大小,同时,在掘进的过程中通过所述注射管8向所述渣土改良层11内补充土体改良剂;
52.s4:启动所述直线导轨柱12上的电动直线导轨模块,驱动所述水平加载梁13下压所述土压千斤顶14,所述土压千斤顶14同步下推所述砼压层15,模拟向所述试验箱模型6内的土体施加压力或者卸载压力,并通过调节而改变下压土体的荷载压力大小;
53.s5:将含有色荧光剂的测试液从所述注水孔1501内注入至所述试验箱模型6内的土体之中,利用所述紫外线模组26照射土体,同时,所述摄像机模组25自所述掘进挡板20顶进至所述隧道模组7内起,即开始拍摄记录,对所述试验箱模型6和隧道模组7内的土体破坏
模式、含有色荧光剂测试液的流向自动进行摄像,并将视频数据上传至所述计算机28中进行piv图像分析,一方面,观察并检测所述隧道模型7掌子面受到所述盾构驱动单元3的主动破坏程度、所述上部加载单元2的被动破坏程度,另一方面,观察并检测荧光剂在土体内不同位置的含量,判断测试液的渗流方向及流量;
54.s6:随着所述上部加载单元2的下压作业及所述盾构驱动单元3的掘进作业的开展,所述位移传感器21、土压传感器22、孔隙水压传感器23和土压力盒24分别实时采集并及时向所述计算机28传送测得的试验数据,所述计算机28结合视频数据进行模拟比对、分析处理,得到所述隧道模型7掌子面的位移——荷载曲线变化规律图,判断掌子面极限支护力;
55.s7:待所述掘进挡板20掘进至所述隧道模型7内的预设位置,停止所述上部加载单元2和盾构驱动单元3,重置所述试验箱模型6内的布局,重复上述s1-s6,得到准确可靠的试验结果,真实全面模拟不同施工工环境下对盾构隧道掌子面的水、土压力以及三维土体破坏模式的影响。
56.应当理解本文所述的例子和实施方式仅为了说明,并不用于限制本发明,本领域技术人员可根据它做出各种修改或变化,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。