激光加速驱动的高能微焦点x射线大视野ct成像装置
技术领域
1.本公开涉及成像技术领域,尤其涉及一种激光加速驱动的高能微焦点x射线大视野ct成像装置。
背景技术:
2.计算机断层成像技术(computed tomography,ct)是通过对以不同角度穿透物体的射线投影成像,从而获得物体截面信息的成像技术。其最开始应用于医学领域中,可以获得人体不同组织结构的三维图像信息。随着ct技术的不断发展,其应用逐渐拓展到了工业无损检测领域,在工业零部件的无损检测中发挥重要作用。
3.随着ct技术应用领域的扩展,对于ct成像装置的性能要求日益提升,比如空间分辨率的要求从毫米级逐渐提高到微米级、亚微米级,穿透厚度的要求也从毫米级逐渐增加到米级,检测对象也从医学或轻物质材料拓展至高密度的金属材料。
4.虽然相关技术中已有微焦点x光机可实现微米级别分辨率,但其能量较低、流强较小,这就意味着只能穿透有限厚度的物体,常用于医学领域;在工业无损检测领域中,检测件多为金属且尺寸较大,这就意味着ct成像装置需要高能x射线,同时兼备大视野特点。现有高能x射线ct装置主要采用基于加速器的高能x射线源,受限于毫米级别的电子束斑尺寸,相关技术中的ct成像装置其源尺寸只能达到毫米量级,无法获得毫米以下乃至百微米级的射线源尺寸,因此,难以应用于大型精密工件内部细小结构和裂纹的无损检测和测量。
5.为了满足高能高分辨的ct成像需求,一方面需要微焦点的高能x射线源,另一方面,适用于高能x射线的高分辨探测器也极为重要。大型工件的无损检测,往往需要覆盖较大的探测范围。然而受限于现有的探测技术、荧光材料制备工艺等因素,目前尚无同时兼顾大视野和高空间分辨的辐射探测方案。
技术实现要素:
6.本公开提出了一种激光加速驱动的高能微焦点x射线大视野ct成像装置。
7.根据本公开的一方面,提供了一种激光加速驱动的高能微焦点x射线大视野ct成像装置,包括:射线产生组件、准直组件、转台、探测器以及处理器;所述射线产生组件用于产生具有预设发散角的高能微焦点射线束;所述准直组件被设置在与所述高能微焦点射线束的出射方向垂直的平面上,所述准直组件包括一个给定尺寸的孔,或多个给定间隔和尺寸的孔,用于使所述高能微焦点射线束从多个孔分别出射,形成多个射线束子束,所述准直组件能够沿与所述出射方向垂直的方向平移;所述转台用于承载待测样品,并进行旋转,或者进行旋转和平移,使得从所述射线束子束能够照射所述待测样品的多个方位,所述转台位于所述准直组件与所述探测器之间;所述探测器用于接收穿过所述待测样品的射线束子束,并获得与所述射线束子束对应的第一图像,所述探测器能够沿与所述出射方向垂直的方向平移;所述处理器用于根据在所述转台进行旋转,以及所述准直组件和所述探测器平移过程中,或者所述转台进行旋转和平移的过程中,获得的多个第一图像,重建生成所述待
测样品的三维扫描图像。
8.在一种可能的实现方式中,射线产生组件包括激光组件、聚焦组件、复合转换靶组件、偏转组件和真空室,所述激光组件、所述聚焦组件、所述复合转换靶组件和所述偏转组件位于所述真空室中;所述激光组件用于产生激光脉冲;所述聚焦组件用于使所述激光脉冲聚焦于所述复合转换靶组件前沿,产生电子束及所述高能微焦点射线束;所述偏转组件用于使所述电子束偏转,使所述电子束偏离所述高能微焦点射线束的出射方向。
9.在一种可能的实现方式中,从所述多个孔分别出射的多个射线束子束构成扇形区域;其中,所述转台进行旋转,以及所述准直组件和所述探测器平移过程,包括:使所述扇形区域穿过所述待测样品所在区域的边缘;使所述转台承载所述待测样品在第一角度范围内按照特定角度间隔逐步旋转;使所述准直组件和所述探测器向着所述待测样品所在区域的另一边缘方向平移预设距离,使得所述扇形区域穿过所述待测样品;迭代执行使所述转台在第一角度范围内逐步旋转,以及使所述准直组件和所述探测器平移预设距离的处理,直到所述扇形区域穿过所述转台的轴心,或者所述扇形区域离开所述待测样品所在区域。
10.在一种可能的实现方式中,从所述多个孔分别出射的多个射线束子束构成扇形区域;其中,所述转台进行旋转和平移的过程,包括:使所述扇形区域穿过所述待测样品所在区域的边缘;使所述转台承载所述待测样品在第一角度范围内按照特定角度间隔逐步旋转;使所述转台平移预设距离,使得所述扇形区域穿过所述待测样品;迭代执行使所述转台在第一角度范围内逐步旋转,以及平移预设距离的处理,直到所述扇形区域穿过所述转台的轴心,或者所述扇形区域离开所述待测样品所在区域。
11.在一种可能的实现方式中,在停止迭代的条件为所述扇形区域穿过所述转台的轴心的情况下,所述第一角度为360
°
。
12.在一种可能的实现方式中,在停止迭代的条件为所述扇形区域离开所述待测样品所在区域的情况下,所述第一角度为180
°
或360
°
。
13.在一种可能的实现方式中,所述探测器包括多个探测单元,所述预设距离包括所述探测器平移的第一距离,在所述迭代的次数为奇数的情况下,所述第一距离大于所述探测单元之间的间隔距离,且小于探测单元的探测范围在所述探测器平移方向上的长度。
14.在一种可能的实现方式中,所述预设距离包括所述探测器平移的第二距离,在所述迭代的次数为偶数的情况下,根据所述第一距离、所述探测单元之间的间隔距离和所述探测区域在所述探测器平移方向上的长度,确定所述第二距离。
15.在一种可能的实现方式中,所述处理器进一步用于:对多个所述第一图像进行校正、配准和拼接,获得所述待测样品的各个方位的投影图像;根据所述投影图像,获得所述待测样品的三维扫描图像。
16.在一种可能的实现方式中,在停止迭代的条件为所述扇形区域的一侧穿过所述转台的轴心的情况下,所述处理器进一步用于:对所述投影图像进行重组处理,获得重组处理后的投影图像;根据所述重组处理后的投影图像,获得所述三维扫描图像。
17.在一种可能的实现方式中,所述复合转换靶组件包括气体靶和固体靶。
18.在一种可能的实现方式中,所述探测器包括一个或多个探测单元,所述探测单元包括平板探测器,或者闪烁体、光学相机和屏蔽体;所述闪烁体位于所述屏蔽体的开口处,所述光学相机位于屏蔽体内;所述闪烁体用于接收穿过所述待测样品的射线束子束,并产
生光学信号;所述光学相机用于采集所述光学信号,并获得所述第一图像。
19.根据本公开的实施例的激光加速驱动的高能微焦点x射线大视野ct成像装置,可通过准直组件的多个孔分别获得多个方位的射线束子束,使得射线束子束能够以多个角度照射多个方位的待测样品区域,并降低杂散信号导致的噪声;且可通过多个孔,从多个角度照射待测样品的局部区域,通过转台的转动,以及准直组件和探测器的平移,使能够探测到的方位增加,从而扩大检测区域的视野,使得成像装置可满足高分辨率和大视野的要求。
20.应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,而非限制本公开。根据下面参考附图对示例性实施例的详细说明,本公开的其它特征及方面将变得清楚。
附图说明
21.此处的附图被并入说明书中并构成本说明书的一部分,这些附图示出了符合本公开的实施例,并与说明书一起用于说明本公开的技术方案。
22.图1示出根据本公开实施例的激光加速驱动的高能微焦点x射线大视野ct成像装置的示意图;
23.图2示出根据本公开实施例的激光加速驱动的高能微焦点x射线大视野ct成像装置的平面示意图;
24.图3示出根据本公开实施例的转台旋转及准直组件和探测器平移过程的示意图;
25.图4示出根据本公开实施例的激光加速驱动的高能微焦点x射线大视野ct成像装置的应用示意图。
具体实施方式
26.以下将参考附图详细说明本公开的各种示例性实施例、特征和方面。附图中相同的附图标记表示功能相同或相似的元件。尽管在附图中示出了实施例的各种方面,但是除非特别指出,不必按比例绘制附图。
27.在这里专用的词“示例性”意为“用作例子、实施例或说明性”。这里作为“示例性”所说明的任何实施例不必解释为优于或好于其它实施例。
28.本文中术语“和/或”,仅仅是一种描述关联对象的关联关系,表示可以存在三种关系,例如,a和/或b,可以表示:单独存在a,同时存在a和b,单独存在b这三种情况。另外,本文中术语“至少一种”表示多种中的任意一种或多种中的至少两种的任意组合,例如,包括a、b、c中的至少一种,可以表示包括从a、b和c构成的集合中选择的任意一个或多个元素。
29.另外,为了更好地说明本公开,在下文的具体实施方式中给出了众多的具体细节。本领域技术人员应当理解,没有某些具体细节,本公开同样可以实施。在一些实例中,对于本领域技术人员熟知的方法、手段、元件和电路未作详细描述,以便于凸显本公开的主旨。
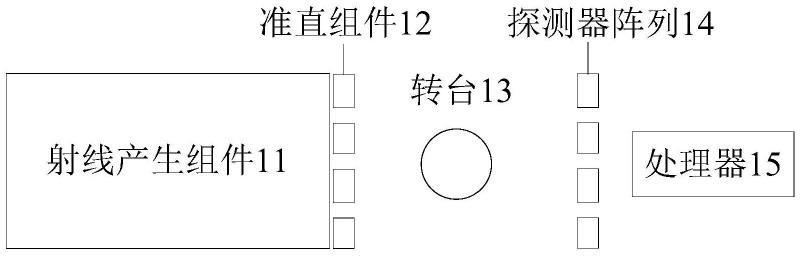
30.图1示出根据本公开实施例的激光加速驱动的高能微焦点x射线大视野ct成像装置的示意图,如图1所示,所示装置包括:射线产生组件11、准直组件12、转台13、探测器14以及处理器15;
31.所述射线产生组件11用于产生具有预设发散角的高能微焦点射线束;
32.所述准直组件12被设置在与所述高能微焦点射线束的出射方向垂直的平面上,所
述准直组件包括一个给定尺寸的孔,或多个给定间隔和尺寸的孔,用于使所述高能微焦点射线束从多个孔分别出射,形成多个射线束子束,所述准直组件能够沿与所述出射方向垂直的方向平移;
33.所述转台13用于承载待测样品,并进行旋转,或者进行旋转和平移,使得从所述射线束子束能够照射所述待测样品的多个方位,所述转台位于所述准直组件与所述探测器之间;
34.所述探测器14用于接收穿过所述待测样品的射线束子束,并获得与所述射线束子束对应的第一图像,所述探测器能够沿与所述出射方向垂直的方向平移;
35.所述处理器15用于根据在所述转台进行旋转,以及所述准直组件和所述探测器平移过程中,或者所述转台进行旋转和平移的过程中,获得的多个第一图像,重建生成所述待测样品的三维扫描图像。
36.根据本公开的实施例的激光加速驱动的高能微焦点x射线大视野ct成像装置,可通过准直组件的多个孔分别获得多个方位的射线束子束,使得射线束子束能够以多个角度照射多个方位的待测样品区域,并降低杂散信号导致的噪声;且可通过多个孔,从多个角度照射待测样品的局部区域,通过转台的转动,以及准直组件和探测器的平移,使能够探测到的方位增加,从而扩大检测区域的视野,使得成像装置可满足高分辨率和大视野的要求。
37.在一种可能的实现方式中,所述射线产生组件11可以是能够产生高能微焦点射线束的组件,例如,射线产生组件可以产生不同能量区间的x射线或伽马射线,本公开对射线的类型不做限制。
38.在一种可能的实现方式中,所述射线产生组件11产生的高能微焦点射线束具有一定的发散角,例如,高能微焦点射线束从射线源出射后,在平面图中可形成扇形,从准直组件的多个孔中分别出射时,多个孔分别出射的射线束子束仍可在平面图中可形成扇形。
39.在一种可能的实现方式中,所述射线产生组件11可以是能够产生x射线的任意设备,在示例中,所述射线产生组件11可以是基于激光等离子体加速技术的射线产生组件。
40.在一种可能的实现方式中,激光等离子体加速技术是一种可产生电子束并使电子束迅速加速的技术,当相对论光强的激光脉冲在低于临界密度的等离子体介质中传播时,可产生有质动力并使正负电荷分离,进而产生周期性变化的电场,即等离子体尾场。而电子则可在尾场中受纵向电场的作用加速。由于在等离子体中没有击穿阈值的限制,激光等离子体加速器可以达到比相关技术中的射频加速器高3个数量级的加速梯度,因此,可大大缩小加速器装备规模。同时由于等离子体尾场超小的加速结构(例如,十微米到百微米量级),加速获得的电子束自然具备一些显著的特性,例如,微米级的电子束斑尺寸。
41.在一种可能的实现方式中,当脉宽为飞秒级的激光脉冲聚焦到气体靶中的情况下,激光脉冲将气体电离为等离子体,并与等离子体相互作用可产生高能电子束,该微米级尺寸电子束轰击固体靶,电子束与材料中的原子发生库伦散射作用,产生韧致辐射,即可获得微焦点高能x射线,该韧致辐射源的源尺寸为微米级。此外,通过调节激光脉冲的脉宽、束腰半径和峰值功率等参数,以及转化靶(例如,气体靶和固体靶的长度、材质等)的参数,能够对高能x射线的源尺寸、能量和发散角进行调节。因此,基于激光等离子体加速技术的轫致辐射高能x射线源拥有能量高、参数可调节、焦斑尺寸小、成像分辨率高等诸多优势,并且,高能x射线束的方向性较好,可大幅减少周围环境的辐射剂量,降低辐射屏蔽需求。因
此,基于激光等离子体加速技术的高能x射线源在高能x射线微焦点、高分辨率成像应用中具有显著的技术优势。
42.在一种可能的实现方式中,在所述射线产生组件11为上述基于激光等离子体加速技术的高能x射线源的情况下,所述射线产生组件包括激光组件、聚焦组件、复合转换靶组件、偏转组件和真空室,所述激光组件、所述聚焦组件、所述复合转换靶组件和所述偏转组件位于所述真空室中;所述激光组件用于产生激光脉冲;所述聚焦组件用于使所述激光脉冲聚焦于所述复合转换靶组件前沿,产生电子束及所述高能微焦点射线束;所述偏转组件用于使所述电子束偏转,使所述电子束偏离所述射线的出射方向。
43.图2示出根据本公开实施例的激光加速驱动的高能微焦点x射线大视野ct成像装置的平面示意图,如图2所示,所述射线产生组件11为上述基于激光等离子体加速技术的高能x射线源,其中,所述射线产生组件11可包括真空室2,以及激光组件1、聚焦组件3、复合转换靶组件和偏转组件6,在示例中,所述复合转换靶组件可包括气体靶4和固体靶5。所述激光组件1、聚焦组件3、气体靶4、固体靶5和偏转组件6位于所述真空室2中,使得射线在真空环境中产生。
44.在一种可能的实现方式中,所述射线产生组件包括激光组件1,所述激光组件1可用于产生激光脉冲,例如,中心波长800nm左右,脉冲长度为20fs-30fs,峰值功率约为10tw-50tw,单脉冲能量0.5j-1.2j,光束直径为30mm-45mm的飞秒激光脉冲。本公开对激光组件产生的激光脉冲的具体参数不做限制。
45.在一种可能的实现方式中,上述激光脉冲经过聚焦组件3的聚焦作用,聚焦至气体靶4。所述聚焦组件3可以是离轴抛物面镜,其焦距为480mm,本公开对聚焦组件的具体类型和参数不做限制。
46.在一种可能的实现方式中,所述气体靶为气体喷嘴喷出的气体介质,其中,气体喷嘴的内径为0.5mm-3mm,喷出气体的压强为0.5mpa-5mpa。激光脉冲可使气体靶电离,产生电子束,并通过尾波场对电子束进行加速。使用该方式对电子束加速的加速梯度较高,可在很短的距离内大幅提高电子束的能量,因此,气体靶所占空间可以很小,即可产生具有较高能量的电子束。例如,可调整上述气体喷嘴的内径以及喷出气体的压强等参数,即可使电子束在0.1mev-100mev进行能量调节,换言之,使用上述参数的气体靶,即可产生具有0.1mev-100mev能量的电子束。本公开对气体喷嘴的参数以及电子束的能量参数不做限制。
47.在一种可能的实现方式中,以上产生的电子束可作用于固体靶5,从而产生高能x射线,上述固体靶5可以是厚度为1mm-5mm的金属钨,电子束作用于固体靶5后,可产生韧致辐射。在示例中,电子束可轰击固体靶5,并与固体靶中的原子发生库伦散射作用,产生韧致辐射,即x射线。本公开对固体靶的参数不做限制。
48.在一种可能的实现方式中,以上过程中,电子束的能量、固体靶5的材质和厚度均为可调的参数,因此,产生的高能x射线的能量、源尺寸和发散角也为可调的参数。在另一示例中,调节激光脉冲的脉冲长度、束腰半径和峰值功率等参数,也可实现对于射线的参数的调节。在示例中,以上过程产生的高能x射线的源尺寸为1μm-100μm,能量为0.1mev-100mev,发散角为10mrad-150mrad。本公开对射线的具体参数不做限制。
49.在一种可能的实现方式中,以上过程为激光脉冲与气体靶和固体靶组成的复合转换靶发生作用,产生高能微焦点射线束的过程,其中,复合转换靶也可由其他结构组成,不
限于气体靶和固体靶。
50.在一种可能的实现方式中,以上过程产生的高能微焦点射线束(例如,高能x射线)可与电子束(例如,与固体靶发生作用后残余的电子束)从固体靶中出射。也可去除残余的电子束,仅使高能微焦点射线束照射到准直组件12。在示例中,可使用偏转组件6使电子束发生偏转,例如,所述偏转组件6可以是二极磁铁,可使电子束发生偏转,且不影响高能微焦点射线束的传播方向。偏转后的电子束7未能运动至准直组件12的孔中,而高能微焦点射线束可沿原路径照射至准直组件12,并可从准直组件12的孔中出射。
51.在一种可能的实现方式中,以上基于激光等离子体加速技术的高能x射线源仅为示例,所述射线产生组件11可以是能够产生射线(例如,x射线、伽马射线等)的任意设备,本公开对射线产生组件的类型和结构不做限制。例如,将激光脉冲聚焦于气体靶中将气体电离为等离子体并发生相互作用,电子束在等离子体尾波场中被加速,并产生横向振荡以及发射betatron辐射,即x射线;又例如,由激光等离子体相互作用产生的电子束,与另一束激光相互对撞,发生逆康普顿散射,发射x射线。
52.在一种可能的实现方式中,准直组件12可设置在与射线的出射方向垂直的平面上,使得高能微焦点射线束可从准直组件12的多个孔中分别出射,形成多个射线束子束。由于高能微焦点射线束具有一定的发散角,因此,高能微焦点射线束在平面图中可形成扇形区域,从多个孔分别出射的射线束子束(例如,多个锥束的x射线)也可构成扇形区域。在示例中,准直组件12可由钨制成,准直组件12上可包括多个给定间隔和尺寸的方形孔。
53.在示例中,探测器14可包括一个或多个探测单元,即,探测器14可以是由探测器单元组成的探测阵列,方形孔的尺寸和数量可与探测器14的探测单元尺寸和数量对应,例如,每个锥束的射线束子束可与探测器14中的一个探测单元对应。一个锥束的射线束子束从设定好的孔径中出射后,由于存在发散角,出射的射线束子束可呈现发散的扇形的形状,即,射线束子束的前端相对于从孔中出射时范围更大,而射线束子束在到达探测单元的位置时,探测单元可捕获该锥束的全部射线束子束,基于这种关系(例如,散射角、距离等关系),可确定孔的孔径。本公开对准直组件12的制造材料,以及孔的形状和尺寸不做限制。
54.在示例中,探测器14也可仅包括一个尺寸较大的探测器,相对应,准直组件只包含一个方形孔,从而可直接以单个锥束射线进行成像。
55.在一种可能的实现方式中,转台13可承载待测样品,可使转台携带待测样品进行旋转,使得各个锥束的射线束子束能够照射到各个方位的待测样品。所述转台的轴心可位于高能微焦点射线束的正中心,多个锥束的射线束子束可照射到待测样品,且在转台旋转时,多个锥束的射线束子束可照射到不同方位的待测样品。在示例中,所述转台的直径为80cm,可承载100kg的待测样品。本公开对转台的尺寸和承重能力不做限制。
56.在一种可能的实现方式中,准直组件12和探测器14均可沿与出射方向垂直的方向平移,从而在平移过程中获得更多视角的待测样品的图像,增大探测视野。探测器14可获得转台旋转以及准直组件和探测器平移过程中的多个第一图像。
57.在一种可能的实现方式中,在转台13旋转过程中,待测样品可以以不同的方位面向高能微焦点射线束的各个锥束的射线束子束,从而在转台13旋转的过程中,探测器14可基于穿过待测样品的各个锥束的射线束子束,获得第一图像,且在转台13旋转到不同角度时,基于各个锥束获得的第一图像可不同。在转台旋转完成180
°
或360
°
角度范围时,各个锥
束的射线束子束均可照射到待测样品的各个方位,从而可使探测器14获取到待测样品的各个方位的第一图像。
58.在一种可能的实现方式中,进一步地,准直组件12和探测器14均可沿与出射方向垂直的方向平移,在平移过程中,可改变各个锥束的射线束子束的出射角度和部位,转台13可在准直组件12和探测器14的平移过程中,进行旋转,从而使不同出射角度的射线束子束可照射到待测样品的各个方位,从而可使探测器14获取到不同角度的射线束子束照射待测样品时,待测样品各个方位的第一图像。当然,转台13也可沿与出射方向垂直的方向平移,且每次平移后可进行旋转,从而使不同出射角度的射线束子束可照射到待测样品的各个方位,使探测器14获取到不同角度的射线束子束照射待测样品时,待测样品各个方位的第一图像。
59.在一种可能的实现方式中,从所述多个孔分别出射的射线束子束构成扇形区域;所述转台进行旋转,以及所述准直组件和所述探测器平移过程,包括:使所述扇形区域穿过所述待测样品所在区域的边缘;使所述转台承载所述待测样品在第一角度范围内按照特定角度间隔逐步旋转;使所述准直组件和所述探测器向着所述待测样品所在区域的另一边缘方向平移预设距离,使得所述扇形区域穿过所述待测样品;迭代执行使所述转台在第一角度范围内按照特定角度间隔逐步旋转,以及使所述准直组件和所述探测器平移预设距离的处理,直到所述扇形区域穿过所述转台的轴心,或者所述扇形区域离开所述待测样品所在区域。
60.图3示出根据本公开实施例的转台旋转及准直组件和探测器平移过程的示意图,如图3所示,在转台旋转及准直组件12和探测器14平移过程开始时,探测器14位于位置1,准直组件12位于与位置1相应的位置,使得从准直组件12出射的射线束子束构成的扇形区域的一侧与待测样品所在区域的边缘相切。在示例中,所述待测样品可以是切面为圆形的样品,例如,圆柱体样品,球形样品等,扇形区域的一侧可与待测样品的圆形切面的边缘相切。在另一示例中,待测样品是切面为其它形状的样品,则扇形区域的一侧可与待测样品的切面形状的外接圆的边缘相切。本公开对待测样品的具体形状不做限制。
61.在一种可能的实现方式中,在探测器14位于位置1,准直组件12位于与位置1相应的位置时,使转台13承载待测样品在第一角度范围内按照特定角度间隔逐步旋转。所述第一角度可包括180
°
或360
°
。
62.在一种可能的实现方式中,在进行上述旋转的过程中,特定角度间隔可设置为0.5
°‑1°
,可每转动0.5
°‑1°
,通过探测器14获取一次图像,即,可获取到转动0.5
°‑1°
方位时的第一图像。在第一角度范围内逐步旋转的过程中,可获得多次第一图像,且每次均可获得多个第一图像,例如,每次可获得与每个锥束的射线束子束对应的第一图像。
63.在一种可能的实现方式中,在第一角度范围内完成旋转后,可使得准直组件12和探测器14平移预设距离,使得扇形区域的一侧穿过待测样品。如图3所示,探测器14移动到位置2(与位置1在竖直方向上平齐的位置),且基于高能微焦点射线束的发散角以及准直组件12和探测器14之间的距离,准直组件12也进行相应地平移,使得从准直组件12的孔中出射的各锥束的射线束子束仍与探测器14中的探测单元保持对应关系。由于在与出射方向垂直的方向上进行了平移,则在此情况下,从孔中出射的各锥束的射线束子束形成的扇形区域也出现了移动,扇形区域的一侧穿过待测样品所在的区域。
64.在一种可能的实现方式中,在进行上述平移后,可再次使转台13进行旋转,例如,在第一角度范围内逐步旋转,且每旋转0.5
°‑1°
,通过探测器14获取一次第一图像,在旋转完成第一角度后,则可获取到待测样品的多个方位的第一图像。在进行上述平移后,从孔中出射的各锥束的射线束子束与平移之前的各锥束的射线束子束对待测样品的照射角度是不同的,照射部位也是不同的,因此,经过平移,可获取更多方位下的第一图像。
65.在一种可能的实现方式中,在旋转完成第一角度后,可再次将进行准直组件12和探测器14平移(例如,将探测器14平移至位置3,并对准直组件进行相应地平移),并在平移后使转台13在第一角度范围内逐步旋转,从而通过探测器14获取更多视野下的第一图像。迭代执行使转台13在第一角度范围内逐步旋转,以及使准直组件12和探测器14平移预设距离的处理,直到扇形区域穿过转台的轴心,或者扇形区域离开所述待测样品所在区域。则通过平移和旋转的处理,可使各个锥束的射线束子束以各种角度和各种位置照射待测样品,且待测样品在旋转过程中,还可使各个锥束的射线束子束照射到待测样品的各个方位,从而可获得对于待测样品的完整的视野,从而,获得的第一图像可包括所述待测样品的完整视野的图像。
66.在一种可能的实现方式中,如果停止迭代的条件为扇形区域穿过转台的轴心,则可能出现各个锥束的射线束子束未照射到的角度及方位。因此,在这种情况下,可基于旋转过程中的对称性,来确定未照射到的角度及方位中待测样品的视野。从而,为使旋转过程具有对称性,即为了保持投影视野的完整性,在停止迭代的条件为所述扇形区域穿过所述转台的轴心的情况下,所述第一角度为360
°
。即,在每次转台旋转的过程中,可在360
°
范围内逐步旋转,使得待测样品旋转完整一周,则可利用对称性,通过各个锥束的射线束子束照射过的角度中待测样品的视野,来确定未照射过的方位中,待测样品的视野,即,基于各个锥束的射线束子束照射过的角度中,获取的第一图像,来确定未照射过的方位中的第一图像,使得最终获得的待测样品各角度下的投影视野是完整的。
67.在一种可能的实现方式中,如果停止迭代的条件为扇形区域离开待测样品所在区域,则通过上述平移,可使各个锥束的射线束子束完整地照射过待测样品的各个方位,不存在未照射到的方位。因此,在停止迭代的条件为所述扇形区域离开所述待测样品所在区域的情况下,所述第一角度为180
°
或360
°
。即,即使转台13每次仅在180
°
范围内逐步旋转,各锥束的射线束子束照射到待测样品的方位是不完整的,即局部区域,经过上述多次平移,该锥束的射线束子束可照射到各角度下之前未照射到的待测样品的方位,从而使得获得的待测样品的视野是完整的,即,每次在180
°
范围内逐步旋转,获得的第一图像即可足够完成重建三维扫描图像的任务。当然,在停止迭代的条件为扇形区域的一侧离开待测样品所在区域的情况下,第一角度也可为360
°
,来进一步增加投影数据集的大小,提高重建三维扫描图像的品质。
68.在一种可能的实现方式中,在上述对准直组件12和探测器14平移的过程中,平移的距离为预设距离。在示例中,所述探测器包括多个探测单元,所述预设距离包括所述探测器平移的第一距离,在所述迭代的次数为奇数的情况下,所述第一距离大于所述探测单元之间的间隔距离,且小于探测单元的探测范围在所述探测器平移方向上的长度。如图3所示,在第一次平移时(或奇数次平移时),探测器14平移的距离为δd(即,第一距离),根据高能微焦点射线束的发散角,以及准直组件12和探测器14之间的距离等参数,可计算出准直
组件12平移的距离δd
′
,使得通过准直组件12的各个孔出射的各锥束的射线束子束与探测器14中的探测单元保持对应关系。进一步地,为了使平移后各个锥束能够有效地照射到平移以前未照射的角度,也使探测器14中的各探测单元能够探测到有效的视野,即,使平移后的探测单元的探测范围能够覆盖平移前探测单元的盲区(即,探测单元之间的间隔),则探测器14的平移距离δd大于探测单元之间的间隔距离,从而可使平移后的探测单元的探测范围能够覆盖平移前探测单元之间的间隔距离。同时,为了避免角度的遗漏,使得最终获得的待测样品的视野完整,探测器14的平移距离δd小于探测单元的探测范围在探测器平移方向上的长度(例如,探测单元的镜头、探头等敏感部件在平移方向上的长度)。即,l
′
《δd《l,其中,l
′
为探测单元之间的间隔距离,l为探测单元的在平移方向上的长度。
69.在一种可能的实现方式中,进一步地,为了减少平移前后完全重叠的第一图像,或者减少平移前后获取的第一图像中重叠区域的占比,可在第二次平移时(或偶数次平移时),增大移动距离。所述预设距离包括所述探测器平移的第二距离,在所述迭代的次数为偶数的情况下,根据所述第一距离、所述探测单元之间的间隔距离和所述探测区域在所述探测器平移方向上的长度,确定所述第二距离。在示例中,如图3所示,在进行偶数次平移时,可使平移距离(即,第二距离)等于第一距离δd,探测单元之间的间隔距离l
′
以及探测区域在探测器平移方向上的长度l之和,即,第二距离的等于δd l l
′
。可减少平移前后完全重叠的第一图像,或者减少平移前后获取的第一图像中重叠区域的占比,从而在视野完整的情况下,减少获取到的第一图像的数量,进而减少对第一图像进行处理的资源占用,提升对第一图像进行处理的处理效率。
70.以上迭代的次数为奇数和偶数的情况下确定的平移距离仅为示例,平移距离也可以是其他距离,例如,不论迭代的次数为奇数还是偶数,第一距离均可为大于探测单元之间的间隔距离,且小于探测单元的探测范围在探测器平移方向上的长度的距离。本公开对第一距离的具体数值不做限制。
71.当然,所述探测器也可仅包括一个较大的探测器,因此,不存在上述探测单元之间的间隔距离。在这种情况下,探测器平移的距离可根据高能微焦点射线束的发散角、探测器探测区域等距离来确定。本公开对探测器的平移距离的确定方式不做限制。
72.在一种可能的实现方式中,如上所述,转台也可进行平移,例如,以上旋转和平移的过程可由转台自身来完成。所述转台进行旋转和平移的过程,包括:使所述扇形区域穿过所述待测样品所在区域的边缘;使所述转台承载所述待测样品在第一角度范围内按照特定角度间隔逐步旋转;使所述转台平移预设距离,使得所述扇形区域穿过所述待测样品;迭代执行使所述转台在第一角度范围内逐步旋转,以及平移预设距离的处理,直到所述扇形区域穿过所述转台的轴心,或者所述扇形区域离开所述待测样品所在区域。
73.在一种可能的实现方式中,在这种情况下,转台旋转的过程如上所述,在此不再赘述。转台平移可代替准直组件和探测器的平移,即,转台的平移,也可使得探测器探测到更多方位下的待测样品。使得在转台进行旋转和平移的过程中,也可获得对于待测样品的完整的视野,在这种情况下,在所述转台进行旋转和平移的过程中,获得的所述第一图像包括所述待测样品的完整视野的图像。
74.在示例中,转台进旋转,且准直组件和探测器进行平移的过程,与所述转台自身进行旋转和平移的过程,对于获取待测样品的完整视野,以及获取待测样品的完整视野下的
图像来说,可以是等效的,即,两种过程中所获得的第一图像可以是相同的。在这种情况下,以上准直组件和探测器的平移距离可由探测单元之间的间隔距离、探测区域在探测器平移方向上的长度等因素来确定,则在转台自身进行旋转和平移的过程中,转台平移的距离可由转台的位置以及转台与准直组件和探测器之间的距离以及角度关系等因素来确定。使得以上两种过程中获得的第一图像是相同的,换言之,使得两种过程是等效的。即,转台平移的距离也可根据所述高能微焦点射线束的发散角、探测器探测区域、射线源-转台-探测器距离等来确定。本公开对转台的平移距离的确定方式不做限制。
75.在一种可能的实现方式中,如上所述,探测器14可以是高分辨率探测器,可包括一个或多个探测单元,在探测单元获取第一图像时,探测单元可将穿过待测样品的射线束子束,转换为图像数据,获得第一图像。所述探测器包括一个或多个探测单元,所述探测单元包括平板探测器,或者包括闪烁体、光学相机和屏蔽体;所述闪烁体位于所述屏蔽体的开口处,所述光学相机位于屏蔽体内;所述闪烁体用于接收穿过所述待测样品的射线束子束,并产生光学信号;所述光学相机用于采集所述光学信号,并获得所述第一图像。
76.在一种可能的实现方式中,如图2所示,探测单元可包括闪烁体8,屏蔽体9和光学相机10。所述屏蔽体9可以是铅制成的屏蔽体,可减少光学相机周围环境的信号造成的干扰。闪烁体8可位于屏蔽体9的开口处,可用于在受到射线的照射时,产生光学信号,例如,可见光信号,且闪烁体8与光学相机10耦合,即,闪烁体8产生光学信号时,光学相机10即可采集光学信号,从而获得第一图像。在其它示例中,探测单元也可为平板探测器,例如,x射线平板探测单元,本公开对探测单元的类型不做限制。
77.在一种可能的实现方式中,如果探测器仅包括一个尺寸较大的探测器,该探测器也可包括闪烁体、屏蔽体和光学相机等部件,本公开对探测器的结构不做限制。
78.在一种可能的实现方式中,在获得第一图像后,处理器15可对多个第一图像进行处理,从而得到待测样品的三维扫描图像。如上所述,经过平移和旋转过程,探测器14可获得待测样品的多个角度、多个方位的第一图像,使得待测样品的视野完整。处理器15可基于上述多个第一图像,来获得待测样品的完整的三维扫描图像。
79.在一种可能的实现方式中,所述处理器进一步用于:对多个所述第一图像进行校正、配准和拼接,获得所述待测样品的各个角度、各个方位的投影图像;根据所述投影图像,获得所述待测样品的三维扫描图像。
80.在一种可能的实现方式中,可对多个第一图像进行校正、配准和拼接,例如,可对第一图像进行畸变校正处理,并进行配准处理,可基于配准处理确定第一图像之间的关系,例如,各第一图像的拍摄角度、方位之间的相对关系。
81.在一种可能的实现方式中,在进行上述配准后,可对第一图像进行拼接,获得与待测样品的多个方位对应的投影图像。例如,对待测样品接受各角度的射线束子束照射,并将旋转过程中获得的图像进行拼接,可获得与待测样品的各个角度、各个方位对应的投影图像。在示例中,每个锥束的射线束子束均可获得待测样品旋转一周的过程中的多张第一图像,将多张第一图像进行上述处理后,则可获得与该锥束各角度对应的投影图像,即,与各角度下待测样品完整视野的dr(digital radiography,数字化成像)投影图像,该投影图像中包括了待测样品各个方位的视角。进一步地,可根据各角度下投影图像(例如,dr投影图像),获得所述三维扫描图像。
82.在一种可能的实现方式中,在停止迭代的条件为所述扇形区域的一侧穿过所述转台的轴心的情况下,所述处理器进一步用于:对所述投影图像进行重组处理,获得重组处理后的投影图像;根据所述重组处理后的投影图像,获得所述三维扫描图像。
83.在一种可能的实现方式中,如上所述,如果停止迭代的条件为扇形区域的一侧穿过转台的轴心,各锥束的射线束子束照射到待测样品的方位是不完整的,可能出现各个锥束的射线束子束未照射到的角度及方位。但可旋转过程中的对称性,来确定未照射到的角度及方位中待测样品的视野,从而使得获得的待测样品的视野是完整。在这种情况下,可基于探测单元位置和投影角度对投影图像进行重组处理,使得旋转一周的过程中各射线束子束照射到待测样品的各个角度各个方位的投影图像,基于旋转过程中的对称性重组处理为具有待测样品完整视野的180
°
范围内投影图像(例如,dr投影图像)。进而可基于投影图像获得三维扫描图像。本公开对图像重建算法不做限制。
84.根据本公开的实施例的激光加速驱动的高能微焦点x射线大视野ct成像装置,可通过射线产生组件产生高能微焦点射线束,提升三维扫描图像的分辨率。可通过准直组件的多个孔分别获得多个角度的射线束子束,同时利用高灵敏高空间分辨率的探测阵列系统进行局部区域的辐射图像采集,且搭配转台旋转以及准直组件及探测器平移的ct扫描方式,使能够探测到的方位进一步增加,扩大探测视野。并在平移过程中对平移距离进行设置,减少重复和遗漏,结合图像校正和图像拼接技术等从而获得待测样品在各角度下完整视野的投影图像(即dr投影图像),并通过ct重建获得待测样品的三维扫描图像,从而实现高分辨率和大视野的要求。这种基于探测阵列——图像拼接的ct装置,既可解决高能微焦点x射线源对空间分辨率和辐射剂量的严苛要求,同时也能避免现有辐射探测中高灵敏、高空间分辨率的大面积高能x射线探测系统技术瓶颈,最终实现具备大视野和高空间分辨率高能x射线辐射成像需求。
85.图4示出根据本公开实施例的激光加速驱动的高能微焦点x射线大视野ct成像装置的应用示意图,如图4所示,射线产生组件可设置在箱体中,所述射线产生组件可以是基于激光等离子体加速技术的高能x射线源。在箱体中,还可包括控制温度和湿度的空调等组件。
86.在一种可能的实现方式中,准直组件可设置在x射线的出口处,且包括多个孔,x射线可从多个孔中分别出射,行程多个锥束的射线束子束。
87.在一种可能的实现方式中,转台可位于准直组件和探测器之间,可承载待测样品进行旋转,还可进行高度的调节。
88.在一种可能的实现方式中,探测器可接收穿过待测样品的射线束子束,并通过闪烁体将射线转换为可见光信号,并通过光学相机检测可见光信号,获得多个第一图像。
89.在一种可能的实现方式中,在检测过程中,可调整准直组件和探测器的位置,使得多个锥束的射线束子束形成的扇形区域的一侧与待测样品所在区域相切,并使转台在360
°
范围内逐步旋转,每隔0.5
°‑1°
,可获取一次第一图像,在旋转结束时,可获取多个第一图像。
90.在一种可能的实现方式中,在旋转后,可使准直组件和探测器进行平移,使得扇形区域的一侧穿过待测样品所在区域,且再次使转台在360
°
范围内逐步旋转,在旋转过程中,获取多个第一图像。
91.在一种可能的实现方式中,可迭代执行上述旋转和平移过程,并获取多个第一图像,在平移过程中,奇数次平移时,探测器的平移距离为δd,且l
′
《δd《l,其中,l
′
为探测单元之间的间隔距离,l为探测单元的在平移方向上的长度。偶数次平移时,探测器的平移距离为δd l l
′
。以上迭代过程直到扇形区域的一侧离开待测样品所在区域时停止。在上述过程后,可获得多个第一图像,使得待测样品的视野完整。
92.在一种可能的实现方式中,可通过处理器来对第一图像进行处理,以重建待测样品的三维扫描图像。
93.以上已经描述了本公开的各实施例,上述说明是示例性的,并非穷尽性的,并且也不限于所披露的各实施例。在不偏离所说明的各实施例的范围和精神的情况下,对于本技术领域的普通技术人员来说许多修改和变更都是显而易见的。本文中所用术语的选择,旨在最好地解释各实施例的原理、实际应用或对市场中的技术的改进,或者使本技术领域的其它普通技术人员能理解本文披露的各实施例。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。