1.本发明涉及图像识别与计算机视觉技术领域,特别是涉及一种夜间地面火情自动识别方法、系统、电子设备及介质。
背景技术:
2.现有的烟雾火情探测主要依据烟雾、温度和亮光等进行判断,随着神经网络和机器学习方法的发展,一般采用基于图像卷积学习的方法进行火情检测。由于其基于数据先验与统计学,因此其算法的鲁棒性不佳。并且现有的使用深度学习的火情检测方法,大多不对像元所属地域,比如陆地、海洋等进行区分,可能导致检测结果的精度不够理想,误检率较高。
3.卫星微光成像仪具有很好的自然光源成像能力,可探测的最低辐射强度达到~10-9w·
cm-2
·
sr-1
·
μm-1
。而夜间火情在微光影像上有类似于城市灯光的特征,其辐射能量在微光成像仪的探测范围内。但是目前尚不存在采用卫星微光成像仪对火情进行检测的技术方案。
技术实现要素:
4.本发明的目的是提供一种夜间地面火情自动识别方法、系统、电子设备及介质,基于卫星微光成像仪,对获取到的微光观测图像数据进行自动火情识别,具有高精度、高可靠性的优点。
5.为实现上述目的,本发明提供了如下方案:
6.第一方面,本发明提供一种夜间地面火情自动识别方法,包括:
7.获取卫星微光成像仪输出的微光观测图像数据;所述微光观测图像数据包括多个像元的微光观测数据;
8.对所述微光观测图像数据分别进行夜间像元识别处理、陆地像元识别处理和云像元去除处理,以得到初步微光图像数据;
9.对所述初步微光图像数据进行火情像元的筛选,以得到疑似火情像元数据;
10.根据所述疑似火情像元数据,确定绝对火情像元数据和相对火情像元数据;所述绝对火情像元数据和所述相对火情像元数据构成夜间地面火情数据。
11.可选地,所述微光观测数据包括m13波段数据和m16波段数据;
12.对所述微光观测图像数据分别进行夜间像元识别处理、陆地像元识别处理和云像元去除处理,以得到初步微光图像数据,具体包括:
13.针对每个像元,判断所述像元的m13波段数据对应的太阳天顶角是否大于第一设定阈值,以得到第一结果;
14.若第一结果表示否,将所述像元剔除;
15.若第一结果表示是,则将所述像元标记为夜间像元;多个所述夜间像元构成夜间像元集合;
16.基于陆地/海洋静态地理数据库,对所述夜间像元集合进行匹配筛选,以得到夜间陆地像元集合;所述夜间陆地像元集合包括多个夜间陆地像元;
17.针对每个夜间陆地像元,判断所述夜间陆地像元的m16波段数据对应的亮温值是否小于第二设定阈值,以得到第二结果;
18.若所述第二结果表示是,则将所述夜间陆地像元剔除;
19.若所述第二结果表示否,则将所述夜间陆地像元标记为初步微光像元;多个所述初步微光像元构成初步微光图像数据。
20.可选地,所述微光观测数据包括dnb波段数据和m13波段数据;
21.对所述初步微光图像数据进行火情像元的筛选,以得到疑似火情像元数据,具体包括:
22.对所述初步微光图像数据中的dnb波段数据,进行第一直方图处理,以得到dnb波段辐射阈值;
23.对所述初步微光图像数据中m13波段数据对应的亮温值,进行第二直方图处理,以得到m13波段亮温阈值;
24.根据所述dnb波段辐射阈值和所述m13波段亮温阈值,从所述初步微光图像数据中提取出初级疑似火情像元集合;所述初级疑似火情像元集合包括多个初级疑似火情像元;所述初级疑似火情像元为所述初步微光图像数据中dnb波段数据大于所述dnb波段辐射阈值、且m13波段数据对应的亮温值大于所述m13波段亮温阈值的像元;
25.判断所述初级疑似火情像元的亮温差值是否大于第三设定阈值,以得到第三结果;所述初级疑似火情像元的亮温差值为初级疑似火情像元的m13波段数据对应的亮温值与m16波段数据对应的亮温值的差值;
26.若所述第三结果表示是,则将所述初级疑似火情像元标记为次级疑似火情像元;多个所述次级疑似火情像元构成疑似火情像元数据;
27.若所述第三结果表示否,则将所述初级疑似火情像元剔除。
28.可选地,所述疑似火情像元数据包括多个次级疑似火情像元;所述微光观测数据包括m13波段数据和m16波段数据;
29.根据所述疑似火情像元数据,确定绝对火情像元数据和相对火情像元数据,具体包括:
30.判断所述次级疑似火情像元的m13波段数据是否大于第四设定阈值,以得到第四结果;
31.若所述第四结果表示是,则将所述次级疑似火情像元标记为绝对火情像元;多个所述绝对火情像元构成绝对火情像元数据;
32.若所述第四结果表示否,则根据所述次级疑似火情像元的m13波段数据和m16波段数据,确定相对火情像元数据。
33.可选地,根据所述次级疑似火情像元的m13波段数据和m16波段数据,确定相对火情像元数据,具体包括:
34.以所述次级疑似火情像元为中心,建立背景窗口,并提取所述背景窗口中的背景像元;
35.针对每个背景像元,判断所述背景像元是否满足预设火情测试条件组,以得到第
五结果;所述预设火情测试条件组包括第一条件、第二条件和第三条件;所述第一条件为根据所述次级疑似火情像元的亮温偏差、所述背景像元的亮温平均偏差和所述背景像元的亮温的平均绝对偏差确定;所述第二条件为根据所述次级疑似火情像元的亮温偏差和所述背景像元的亮温平均偏差确定;所述第三条件为根据所述次级疑似火情像元的m13波段数据对应的亮温值、所述背景像元的m13波段数据对应的亮温值和所述背景像元的m13波段数据对应的亮温值的绝对差值的平均值确定;所述次级疑似火情像元的亮温偏差表示次级疑似火情像元的m13波段数据对应的亮温值与m16波段数据对应的亮温值的差值;所述背景像元的亮温平均偏差表示背景像元的m13波段数据对应的亮温值与m16波段数据对应的亮温偏差的平均值;所述背景像元的亮温的平均绝对偏差表示背景像元的m13波段数据对应的亮温值与m16波段数据对应的亮温值的绝对差值的平均值;
36.若所述第五结果表示是,则将所述背景像元标记为相对火情像元;多个所述相对火情像元构成相对火情像元数据;
37.若所述第五结果表示否,则舍弃所述背景像元。
38.可选地,所述第一条件为δbt》δbtb 3.5δ(δbtb);
39.所述第二条件为δbt》δbtb 6k;
40.所述第三条件为bt
13
》bt
13b
3δ(bt
13b
);
41.其中,δbt表示次级疑似火情像元的亮温偏差,δbtb表示背景像元的亮温平均偏差,δ(δbtb)表示背景像元的亮温的平均绝对偏差;bt
13
表示次级疑似火情像元的m13波段数据对应的亮温值,bt
13b
表示背景像元的m13波段数据对应的亮温值,δ(bt
13b
)表示背景像元的m13波段数据对应的亮温值的绝对差值的平均值。
42.可选地,在对所述微光观测图像数据分别进行夜间像元识别处理、陆地像元识别处理和云像元去除处理,以得到初步微光图像数据步骤之前,还包括:
43.采用线性插值法对所述微光观测数据中的缺省值进行填充处理。
44.第二方面,本发明提供一种夜间地面火情自动识别系统,包括:
45.数据获取模块,用于获取卫星微光成像仪输出的微光观测图像数据;所述微光观测图像数据包括多个像元的微光观测数据;
46.像元初步处理模块,用于对所述微光观测图像数据分别进行夜间像元识别处理、陆地像元识别处理和云像元去除处理,以得到初步微光图像数据;
47.疑似火情确定模块,用于对所述初步微光图像数据进行火情像元的筛选,以得到疑似火情像元数据;
48.夜间火情确定模块,用于根据所述疑似火情像元数据,确定绝对火情像元数据和相对火情像元数据;所述绝对火情像元数据和所述相对火情像元数据构成夜间地面火情数据。
49.第三方面,本发明提供一种电子设备,包括存储器和处理器;
50.所述存储器用于存储计算机程序,所述处理器用于运行所述计算机程序以执行夜间地面火情自动识别方法。
51.本发明提供一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序;
52.所述计算机程序被处理器执行时实现夜间地面火情自动识别方法的步骤。
53.根据本发明提供的具体实施例,本发明公开了以下技术效果:
54.本发明提供了一种夜间地面火情自动识别方法、系统、电子设备及介质,获取卫星微光成像仪输出的微光观测图像数据;对上述微光观测图像数据依次进行夜间像元识别处理、陆地像元识别处理、云像元去除处理和火情像元的筛选,以得到疑似火情像元数据;最后对疑似火情像元数据进一步进行筛选,确定出绝对火情像元数据和相对火情像元数据。本发明利用火源在夜间可见光/近红外波段较强的辐射特性,结合卫星微光成像仪在4μm通道附近对热辐射的敏感度明显高于11μm通道附近的特性,提取夜间像元和陆地像元,剔除云像元,并对疑似火情像元做进一步的筛选和提取,从而快速得到准确可靠的夜间地面火情像元。
附图说明
55.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
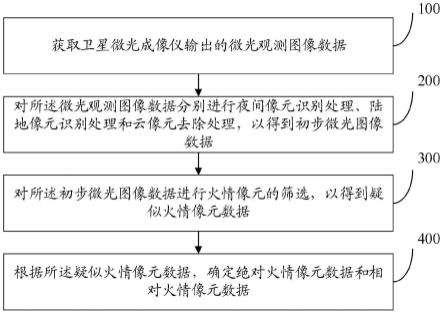
56.图1为本发明夜间地面火情自动识别方法的流程示意图;
57.图2为本发明实施例中火情检测数对比图;
58.图3为本发明夜间地面火情自动识别系统的结构示意图。
具体实施方式
59.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
60.为使本发明的目的、特征和优点能够更加明显易懂,下面结合附图和具体实施方式对本发明作进一步详细的说明。
61.实施例一
62.如图1所示,本实施例提供一种夜间地面火情自动识别方法,包括:
63.步骤100,获取卫星微光成像仪输出的微光观测图像数据;所述微光观测图像数据包括多个像元的微光观测数据;所述微光观测数据包括m13波段数据、m16波段数据和dnb波段数据。其中,m13波段数据、m16波段数据和dnb波段数据均为sdr(sensor data records)级别数据;sdr(sensor data records)是指上述波段的一种数据格式或级别,后文默认均使用上述三种波段的sdr级别数据。
64.在步骤200之前,夜间地面火情自动识别方法,还包括:
65.采用线性插值法对所述微光观测数据中的缺省值进行填充处理。具体地,卫星微光成像仪在进行数据处理时,对于缺失值一般填充为999.9和-999.9,而这些数据并无实际含义,为了保证数据的有效性以及减少后续计算的复杂度,需要对这些缺失值进行处理。
66.m13波段数据、m16波段数据和dnb波段数据中的缺失值主要为obpt(onboard pixel trim,在轨像元修整)类型,该类型缺失值是由数据获取过程中的“蝴蝶结效应”所造
成的,因此采用线性插值的方法对此类缺失值进行填充处理。
67.在具体实际应用中,还可对经过线性插值之后得到的数据进行空间匹配。
68.步骤200,对所述微光观测图像数据分别进行夜间像元识别处理、陆地像元识别处理和云像元去除处理,以得到初步微光图像数据。
69.步骤200具体包括:
70.(1)针对每个像元,判断所述像元的m13波段数据对应的太阳天顶角是否大于第一设定阈值,以得到第一结果;具体地,所述第一设定阈值为100
°
。
71.若第一结果表示否,则表示所述像元为白天或者晨昏时段,将所述像元剔除,以排除干扰;若第一结果表示是,则将所述像元标记为夜间像元;多个所述夜间像元构成夜间像元集合。
72.(2)基于陆地/海洋静态地理数据库,对所述夜间像元集合进行匹配筛选,以得到夜间陆地像元集合,保证火情检测背景为地面;所述夜间陆地像元集合包括多个夜间陆地像元。
73.具体地,陆地/海洋静态地理数据库包括经纬度信息和陆地、水体标识,而陆地、水体标识定义了地球上哪些位置是陆地,哪些位置是水体。微光观测图像数据中还包括图像的经纬度信息,通过将图像的经纬度信息与陆地/海洋静态地理数据库中的经纬度信息进行匹配,根据所述陆地/海洋静态地理数据库中的陆地、水体标识,与微光观测图像数据进行比对,从而确定陆地像元和水体像元,将水体像元剔除仅保留陆地像元,能够避免水体像元对下一步数据处理的干扰。
74.(3)云是影响火情检测的重要干扰因素云覆盖区域传感器接收到的地物光谱信息被污染,从而会影响对火情的检测。为有效消除云对提取结果的干扰,还需进行云识别,达到去云的目的。因此,进行如下步骤的处理:
75.针对每个夜间陆地像元,判断所述夜间陆地像元的m16波段数据对应的亮温值是否小于第二设定阈值,以得到第二结果;所述第二设定阈值为265k。
76.若所述第二结果表示是,则表示有云像元存在,数据不准确,将所述夜间陆地像元剔除;若所述第二结果表示否,则将所述夜间陆地像元标记为初步微光像元;多个所述初步微光像元构成初步微光图像数据。
77.步骤300,对所述初步微光图像数据进行火情像元的筛选,以得到疑似火情像元数据。
78.步骤300具体包括:
79.(1)考虑到夜间火情在dnb波段的辐射值高于背景像元,因此考虑引入dnb波段辐射阈值联合红外亮温(亮温差)阈值完成疑似火情的筛选。
80.具体地,对所述初步微光图像数据中的dnb波段数据,进行第一直方图处理,以得到dnb波段辐射阈值。
81.在实际应用中,考虑到采用固定的亮温阈值条件(通常为bt
13
》305k)无法检测出较冷的火源,因此对所述初步微光图像数据中m13波段数据对应的亮温值,进行第二直方图处理,找到火情与背景bt
13
亮温的分割点,即得到m13波段亮温阈值。
82.根据所述dnb波段辐射阈值和所述m13波段亮温阈值,从所述初步微光图像数据中提取出初级疑似火情像元集合;所述初级疑似火情像元集合包括多个初级疑似火情像元;
所述初级疑似火情像元为所述初步微光图像数据中dnb波段数据大于所述dnb波段辐射阈值、且m13波段数据对应的亮温值大于所述m13波段亮温阈值的像元,该像元对应步骤200中已被标记为初步微光像元的像元。
83.(2)火情在中波红外4μm波段(m13波段)附近有较强的红外辐射,而在热红外12μm波段(m16波段)附近辐射相对较弱,可通过设定m13(4.05μm)和m16通道的亮温差阈值条件δbt》10k筛选疑似火情。即:
84.判断所述初级疑似火情像元的亮温差值是否大于第三设定阈值,以得到第三结果;所述初级疑似火情像元的亮温差值为初级疑似火情像元的m13波段数据对应的亮温值与m16波段数据对应的亮温值的差值;所述第三设定阈值为10k。
85.若所述第三结果表示是,则将所述初级疑似火情像元标记为次级疑似火情像元;多个所述次级疑似火情像元构成疑似火情像元数据;若所述第三结果表示否,则将所述初级疑似火情像元剔除。
86.步骤400,根据所述疑似火情像元数据,确定绝对火情像元数据和相对火情像元数据;所述绝对火情像元数据和所述相对火情像元数据构成夜间地面火情数据。
87.步骤400,具体包括:
88.(1)在疑似火情筛选的基础上进行绝对火情阈值测试,设置较高的亮温阈值,仅由非常明确的火点像元触发。
89.优选地,将第四设定阈值设置为320k,判断所述次级疑似火情像元的m13波段数据是否大于第四设定阈值,即bt
13
》320k,以得到第四结果;若所述第四结果表示是,则将所述次级疑似火情像元标记为绝对火情像元;多个所述绝对火情像元构成绝对火情像元数据。若所述第四结果表示否,则根据所述次级疑似火情像元的m13波段数据和m16波段数据,确定相对火情像元数据。
90.(2)上述(1)中的绝对火情阈值测试只能检验出部分明确的火点像元,可能漏判部分潜在的火点。需要通过相对火情阈值测试进一步检测相对火点像元,步骤如下:
91.a)以所述次级疑似火情像元为中心,建立背景窗口,并提取所述背景窗口中的背景像元;具体地,建立n
×
n个像元的背景窗口。其中,奇数n∈[3-21],n取值为能够使得有效的背景像元的数量大于8且达到背景窗口像元的像元总数25%的最小整数。
[0092]
b)针对每个背景像元,判断所述背景像元是否满足预设火情测试条件组,以得到第五结果;所述预设火情测试条件组包括第一条件、第二条件和第三条件。
[0093]
所述第一条件为根据所述次级疑似火情像元的亮温偏差δbt、所述背景像元的亮温平均偏差δbtb和所述背景像元的亮温的平均绝对偏差δ(δbtb)确定,即δbt》δbtb 3.5δ(δbtb);所述第二条件为根据所述次级疑似火情像元的亮温偏差δbt和所述背景像元的亮温平均偏差δbtb确定,即δbt》δbtb 6k;所述第三条件为根据所述次级疑似火情像元的m13波段数据对应的亮温值bt
13
、所述背景像元的m13波段数据对应的亮温值bt
13b
和所述背景像元的m13波段数据对应的亮温值的绝对差值的平均值δ(bt
13b
)确定,即bt
13
》bt
13b
3δ(bt
13b
)。
[0094]
所述次级疑似火情像元的亮温偏差δbt表示次级疑似火情像元的m13波段数据对应的亮温值与m16波段数据对应的亮温值的差值,即bt
13-bt
16
;所述背景像元的亮温平均偏差δbtb表示背景像元的m13波段数据对应的亮温值与m16波段数据对应的亮温偏差的平均
值,即bt
13b-bt
16b
;所述背景像元的亮温的平均绝对偏差δ(δbtb)表示背景像元的m13波段数据对应的亮温值与m16波段数据对应的亮温值的绝对差值的平均值;所述背景像元的m13波段数据对应的亮温值的绝对差值的平均值δ(bt
13b
)表示背景像元的m13波段数据对应的亮温值与m13波段数据对应的亮温平均值的绝对差值的平均值。
[0095]
通过上述三个条件的连续判别,能够消除由于下垫面地物类型不同和火点规模变化对背景温度计算带来的影响,以保证火点提取精度和算法在大范围火点监测中的适用性。
[0096]
c)若所述第五结果表示是,则将所述背景像元标记为相对火情像元;多个所述相对火情像元构成相对火情像元数据;若所述第五结果表示否,则舍弃所述背景像元。
[0097]
在一个具体实施例中,以发生在某地的森林大火为样例,通过将本发明火情检测结果与npp/viirs官方发布的火情产品做对比(二者的时空范围可以完全匹配),可得本发明检测出的绝对火情像元和相对火情像元与npp/viirs官方产品火情地理位置基本吻合。根据图2示出的火情检测数对比图,可清楚得知:该地的火情在2020年3月30日覆盖的范围最广,火情像元数最多,达到21个。随后两天火势减小,火情像元数分别减少到19个和7个。但在4月2日火势有所反弹,火情像元数增加至15个,随后在4月3日火情基本可到控制,火情像元数减少至1个。并且,图2中本算法火情像元数与npp/viirs官方产品折线图走势基本一致,且二者火情检测数量差异不超过3个像元,表明本算法具有可行性。
[0098]
本发明利用火源在夜间可见光/近红外波段较强的辐射特性,结合卫星在4μm通道附近对热辐射的敏感度明显高于11μm通道附近的特性,采用多通道阈值法区分地面火情与其他特征物,发展以目标物微光辐射特性为基础的夜间地面火情自动识别多通道阈值方法。
[0099]
实施例二
[0100]
如图3所示,为了执行上述实施例一对应的方法,以实现相应的功能和技术效果,本实施例提供了一种夜间地面火情自动识别系统,包括:
[0101]
数据获取模块101,用于获取卫星微光成像仪输出的微光观测图像数据;所述微光观测图像数据包括多个像元的微光观测数据;所述微光观测数据包括m13波段数据、m16波段数据和dnb波段数据。
[0102]
像元初步处理模块201,用于对所述微光观测图像数据分别进行夜间像元识别处理、陆地像元识别处理和云像元去除处理,以得到初步微光图像数据。
[0103]
疑似火情确定模块301,用于对所述初步微光图像数据进行火情像元的筛选,以得到疑似火情像元数据。
[0104]
夜间火情确定模块401,用于根据所述疑似火情像元数据,确定绝对火情像元数据和相对火情像元数据;所述绝对火情像元数据和所述相对火情像元数据构成夜间地面火情数据。
[0105]
实施例三
[0106]
本实施例提供一种电子设备,包括存储器和处理器;所述存储器用于存储计算机程序,所述处理器用于运行所述计算机程序以执行实施例一的夜间地面火情自动识别方法。
[0107]
可选地,所述电子设备为服务器。
[0108]
另外,本实施例还提供一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序;所述计算机程序被处理器执行时实现实施例一的夜间地面火情自动识别方法的步骤。
[0109]
综上,本发明通过引入夜间dnb波段动态辐射阈值和m13通道动态亮温阈值,改进当前火情识别效果,提升夜间地面火情的识别准确率。
[0110]
本说明书中各个实施例采用递进的方式描述,每个实施例重点说明的都是与其他实施例的不同之处,各个实施例之间相同相似部分互相参见即可。
[0111]
本文中应用了具体个例对本发明的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本发明的方法及其核心思想;同时,对于本领域的一般技术人员,依据本发明的思想,在具体实施方式及应用范围上均会有改变之处。综上所述,本说明书内容不应理解为对本发明的限制。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。