1.本发明涉及无人机刚性集联结构领域,尤其涉及一种无人机用组合分离灵巧集联结构。
背景技术:
2.多旋翼无人机是一种高度通用的无人飞行器类型,其具有结构简单、机动性强的特点,可以实现垂直起降,并易于控制,如今已被广泛地运用于拍摄、探测、运输等民用与军用领域。
3.由于多旋翼无人机受到能量转换效率和推重比等因素的限制,其负载能力有限,无法运输质量较大的物体。以多个多旋翼无人机通过运动副集联后组成飞行平台,可以克服单个无人机负载小、欠驱动的缺点,扩大飞行器的接触力面积,显著提高无人机的负载能力。当任务场景变化时,可以根据需要,选择不同的无人机数量和组合形式,具有较强的需求适应能力。但目前尚缺乏一种可以将多个多旋翼无人机通过运动副集联后组成飞行平台的结构。
技术实现要素:
4.针对上述现有技术中的不足,本发明提供一种无人机用组合分离灵巧集联结构,可以将多个多旋翼无人机连接成一个完整的集联体,完成对大质量负载的运输。
5.为了实现上述目的,本发明提供一种无人机用组合分离灵巧集联结构,包括多个组合分离对接单元和一飞行平台;
6.每一所述组合分离对接单元包括一一级球铰连接件、一一级连杆、一二级连杆和一二级球铰连接件;所述一级球铰连接件螺接于一无人机底架上并连接所述一级连杆,所述一级连杆与所述二级连杆螺接,所述二级连杆的底部连接所述二级球铰连接件;
7.所述飞行平台包括一连接板、多个球铰座、一末端执行器连接装置、一连接装置紧固螺母和多个球铰座紧固螺母;所述连接板形成滑槽结构,所述球铰座通过球铰座紧固螺母螺接于所述滑槽结构上;所述末端执行器连接装置通过所述连接装置紧固螺母固定于所述连接板下表面的中部;
8.所述组合分离对接单元通过所述二级球铰连接件连接对应的所述球铰座。
9.优选地,所述一级连杆形成长槽;所述二级连杆的顶端连接有一销钉,所述销钉插设于所述长槽内并与一连杆紧固螺母螺接;所述二级连杆通过所述销钉和所述连杆紧固螺母连接位置和连接角度可调节地连接于所述一级连杆上。
10.优选地,所述一级球铰连接件和所述二级球铰连接件分别包括相连的一球销和一底座;所述一级球铰连接件的所述底座通过螺栓连接所述无人机底架,所述一级球铰连接件的所述球销连接所述一级连杆的顶部;所述二级球铰的所述球销连接所述二级连杆的底部,所述二级球铰的底座连接所述球铰座。
11.优选地,所述滑槽结构包括半径不同的若干组弧形滑槽和呈方形排布的四个直
槽;所述直槽和每组所述弧形滑槽围绕于所述末端执行器连接装置外围。
12.本发明由于采用了以上技术方案,使其具有以下有益效果:
13.本发明可以使多旋翼无人机在飞行过程中调整传递给飞行平台的力的角度,保证了集联体整体的自由度不减少。连杆伸缩部分,本发明采用两级固定的连杆通过紧固螺母组成一根长度可伸缩、角度可调节的连杆,方便改变多无人机刚性集联结构整体构型。调节飞行平台的受力部分,本发明采用将球铰座配置在飞行平台滑槽结构内的方式,可以改变球铰座的位置,安装方便且减少拆装次数,可以快速适应不同的集联形式和多种无人机的几何布局。物体抓取部分,无人机与飞行平台连接的组合分离对接单元,采用刚性连杆结构,保证飞行过程中的稳定性。
14.进一步的,本发明可以在放松连杆紧固螺母后调节一级连杆与二级连杆的角度和一级连杆的有效长度,并通过拧紧连杆紧固螺母固定所调节的角度以快速改变多无人机刚性集联结构的构型。
15.进一步的,球铰座可以调整在飞行平台滑槽结构内的位置,并通过球铰座紧固螺母固定位置,从而改变飞行平台中连接板的受力位置。
16.进一步的,末端执行器连接装置可以安装挂钩、线缆、连杆、机械臂、电磁吸盘等多种不同的末端执行器,以适应多种不同的任务场景。
附图说明
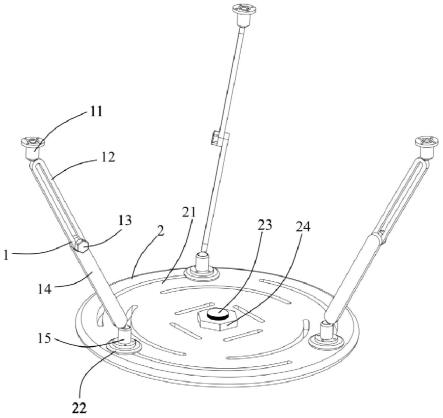
17.图1为本发明实施例一的无人机用组合分离灵巧集联结构的结构示意图;
18.图2为本发明实施例一的无人机用组合分离灵巧集联结构的正视图;
19.图3为本发明实施例一的一级球铰连接件与一级连杆的连接结构示意图;
20.图4为本发明实施例一的二级球铰连接件与球铰座的连接结构示意图;
21.图5为本发明实施例一的末端执行器连接装置与连接装置紧固螺母的连接结构示意图;
22.图6为本发明实施例一的组合分离对接单元的结构示意图;
23.图7为本发明实施例一的飞行平台的结构示意图;
24.图8为本发明实施例一的组合分离对接单元与飞行平台的连接结构示意图;
25.图9为本发明实施例二的无人机用组合分离灵巧集联结构的结构示意图;
26.图10为本发明实施例三的无人机用组合分离灵巧集联结构的结构示意图。
具体实施方式
27.下面根据附图图1~图10,给出本发明的较佳实施例,并予以详细描述,使能更好地理解本发明的功能、特点。
28.请参阅图1~图8,本发明实施例一的一种无人机用组合分离灵巧集联结构,包括多个组合分离对接单元1和一飞行平台2;
29.每一组合分离对接单元1包括一一级球铰连接件11、一一级连杆12、一二级连杆14和一二级球铰连接件15;一级球铰连接件11螺接于一无人机底架上并连接一级连杆12,一级连杆12与二级连杆14螺接,二级连杆14的底部连接二级球铰连接件15;
30.飞行平台2包括一连接板21、多个球铰座22、一末端执行器连接装置23、一连接装
置紧固螺母24和多个球铰座紧固螺母25;连接板21形成滑槽结构,球铰座22通过球铰座紧固螺母25螺接于滑槽结构上;末端执行器连接装置23通过连接装置紧固螺母24固定于连接板21下表面的中部;
31.组合分离对接单元1通过二级球铰连接件15连接对应的球铰座22。
32.一级连杆12形成长槽;二级连杆14的顶端连接有一销钉,销钉插设于长槽内并与一连杆紧固螺母13螺接;二级连杆14通过销钉和连杆紧固螺母13连接位置和连接角度可调节地连接于一级连杆12上。可通过调松连杆紧固螺母13来调节一级连杆12的有效长度和二级连杆14的角度,并通过拧紧连杆紧固螺母13固定所调节的角度以快速改变多无人机刚性集联结构的构型。
33.一级球铰连接件11和二级球铰连接件15分别包括相连的一球销和一底座;一级球铰连接件11的底座通过螺栓连接无人机底架,一级球铰连接件11的球销连接一级连杆12的顶部;二级球铰的球销连接二级连杆14的底部,二级球铰的底座连接球铰座22。可通过调松球铰座紧固螺母25来调节球铰座22在滑槽结构中的位置,进而改变飞行平台2中连接板21的受力位置。
34.滑槽结构包括半径不同的两组弧形滑槽和呈方形排布的四个直槽;直槽和每组弧形滑槽围绕于末端执行器连接装置23外围。
35.本实施例中,三组合分离对接单元1通过球铰座22连接于最外围的三弧形滑槽上。
36.请参阅图9,本发明实施例二的一种无人机用组合分离灵巧集联结构,其结构与实施例一基本相同,其区别在于,三组合分离对接单元1通过球铰座22连接于内侧的三弧形滑槽上,组合分离对接单元1的一级连杆12和二级连杆14呈交叉放置,组成的长连杆进行弯折。
37.请参阅图10,本发明实施例三的一种无人机用组合分离灵巧集联结构,其结构与实施例一基本相同,其区别在于,四组合分离对接单元1通过球铰座22连接于最内侧的四直槽上;组合分离对接单元1的一级连杆12和二级连杆14呈重叠放置,组成的长连杆进行收缩。
38.其他实施例中,可改变一级连杆12和二级连杆14之间的相对角度和二级连杆14销钉在一级连杆12长槽内的相对位置,进而改变组合分离对接单元1连杆的长度和形状。
39.其他实施例中,可改变飞行平台2中球铰座22的数目和其所处在滑槽结构内的位置,进而改变多无人机集联的集联形式和几何布局。
40.其他实施例中,可改变飞行平台2中末端执行器的类型,如连杆、线缆、挂钩、机械臂、电磁吸盘等,以抓取不同类型的负载,适应多种不同的任务场景。
41.以上结合附图实施例对本发明进行了详细说明,本领域中普通技术人员可根据上述说明对本发明做出种种变化例。因而,实施例中的某些细节不应构成对本发明的限定,本发明将以所附权利要求书界定的范围作为本发明的保护范围。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。