1.本发明涉及充电控制技术领域,具体涉及面向低速无人车的自动充电装置及自动充电方法。
背景技术:
2.近年来,随着机器人、无人驾驶技术的发展,更多的无人化场景得以落地,但车辆自动充电问题随之出现,不能满足自动充电的设备本质上并不能被称为无人化设备,基于此各家厂商也提供了自己的无人驾驶自动充电方案。
3.速度低于50km/h的无人设备即为低速无人设备。现阶段基于多向室内机器人,扫地机器人等均为室内充电,依靠视觉识别达到较为精准的定位,但室外低速无人车的充电设备精准闭环、安全等问题室内充电设备很难达到要求。
技术实现要素:
4.有鉴于此,本发明提供了一种面向低速无人车的自动充电装置及自动充电方法,是一种面向室外的双触点的安全低成本的自动充电方法,能够满足目前阶段室外低速无人车的自动充电需求。
5.为达到上述目的,本发明的技术方案为:面向低速无人车的自动充电装置,包括车端电路和充电桩端电路;
6.车端电路包括车载电池、车载控制器以及触点;车载电池的正负极通过车载控制器连接至触点。
7.充电桩端电路包括充电器接口、充电桩控制器以及触板;触板通过充电桩控制器连接至充电器接口。
8.充电时,触板与触点接触连接。
9.进一步地,车端电路还包括车端继电器,所述车端继电器包括车端第一继电器k1、车端第二继电器k3以及车端第三继电器k5。
10.车载电池接口的正极通过车端第一继电器k1和车端第二继电器k3连接触点的正极;车载电池接口的负极通过车端第三继电器k5连接触点的负极;k1、k3和k5均由车载控制器控制;
11.进一步地,充电桩端电路还包括充电桩段继电器包括充电桩端第一继电器k2、充电桩端第二继电器k4以及充电桩第三继电器k6。
12.充电器接口的正极通过第一继电器k2、充电桩端第二继电器k4连接触板的正极;充电机接口的负极通过充电桩第三继电器k6连接触板的负极;k2、k4和k6均由充电桩控制器控制。
13.本发明另外一个实施例还提供了面向低速无人车的自动充电装置自动充电方法,采用上述面向低速无人车的自动充电装置进行自动充电,该方法包括如下步骤:
14.步骤一:充电桩控制器上电启动之后k4、k6继电器吸合至常开端no此时触板与控
制器信号路接通,充电桩控制器实时发送等待充电信号,此时触板只有3v信号电流。
15.步骤二:车端控制器上电启动之后k3、k5继电器吸合至常开端no,此时触点与控制器信号路接通,并等待设备电量过低触发的自动充电指令。
16.步骤三:接收到用户的充电指令之后开始抓取充电桩端信号,用以保证车辆触点与触板连接可靠性,当接收到充电桩端信号之后向用户端反馈当前触板触点已可靠连接。
17.步骤四:车载控制器端向充电桩控制器端发送握手同步信号,充电桩端接收到信号之后反馈给车载端准备就绪信号,同时关闭k4、k6继电器,常闭端nc与公共端com接通,延时设定时间之后吸合k2继电器,触板此时与充电器接通。
18.步骤五:当车载端接收到充电桩端就绪信号之后关闭k3、k5继电器,常闭端nc与公共端com接通,为保证通讯时间差造成的两端动作不同步同样延时设定时间之后吸合继电器k1,此时电池与触点接通,通过之前步骤的触板触点连接确认,此时电池与充电器已完成连接,开始正式充电,同时回路中已经开始有充电电流。
19.步骤六:车载控制器与充电桩端控制器分别从各自探针处拿取回路电流,通过预设阈值判断当前回路充电电流是否正常,当发现电流超过阈值立马关闭k1和k2,同时实时向用户端上报充电状态及当前回路电流值。
20.步骤五:接收到停止充电指令或者触板触点连接中断,即车载控制器与充电桩端控制器检测到充电回路无电流,立即切断车端与桩端供电回路,即关闭k1和k2,等待一段时间后k3、k5、k4、k6再次吸合切换回通信电路,等待下次握手,车载控制器向用户端上报一次。
21.进一步地,延时设定时间为延时3s。
22.有益效果:
23.1、本发明提供了一种面向低速无人车的自动充电装置,是一种面向室外的双触点的安全低成本的自动充电装置,能够满足目前阶段室外低速无人车的自动充电需求。
24.2、本发明提供了一种低速无人车自主充电控制装置,该装置能够实现大型室外低速无人车的自动充电功能,保证了只有充电时才会有电流,且当充电时发生意外原因导致短路或断路时可以采取相应的措施,保证人员及设备安全。提供了一种双触点式多场景自动充电可行性方案。
25.3、本发明针对上述装置提供了一种低速无人车自主充电控制方法,针对室外无人化设备的自动充电,保证了只有充电时才会有电流,且当充电时发生意外原因导致短路或断路时可以采取相应的措施,保证人员及设备安全。提供了一种双触点式多场景自动充电可行性方案。
附图说明
26.图1为本发明电路原理图,relay为继电器,其中k1、k2为单刀单掷继电器,k3、k4、k5、k6为单刀双掷继电器,u1为车载端控制器,u2为充电桩端控制器,p2为车载电池接口p6为电池充电器接口,p4为触点,p5为触板,两个探针用以测量回路电流。
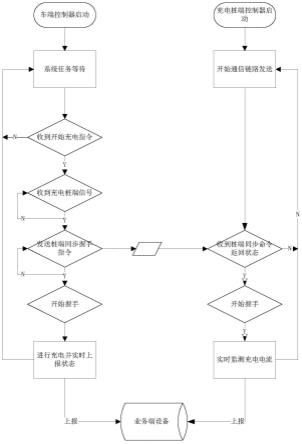
27.图2为本发明流程图。
具体实施方式
28.下面结合附图并举实施例,对本发明进行详细描述。
29.本发明提供了一种面向低速无人车的自动充电装置,如图1所示,包括车端电路和充电桩端电路。
30.车端电路包括车载电池、车载控制器以及触点;车载电池的正负极通过车载控制器连接至触点。
31.充电桩端电路包括充电器接口、充电桩控制器以及触板;触板通过充电桩控制器连接至充电器接口。
32.充电时,触板与触点接触连接。
33.车端电路还包括车端继电器,所述车端继电器包括车端第一继电器k1、车端第二继电器k3以及车端第三继电器k5。
34.车载电池接口的正极通过车端第一继电器k1和车端第二继电器k3连接触点的正极;车载电池接口的负极通过车端第三继电器k5连接触点的负极;k1、k3和k5均由车载控制器控制;
35.充电桩端电路还包括充电桩段继电器包括充电桩端第一继电器k2、充电桩端第二继电器k4以及充电桩第三继电器k6。
36.充电器接口的正极通过第一继电器k2、充电桩端第二继电器k4连接触板的正极;充电机接口的负极通过充电桩第三继电器k6连接触板的负极;k2、k4和k6均由充电桩控制器控制。
37.如图2所示,是本发明实施例提供的一种面向低速无人车的自动充电方法,是一种面向室外的双触点的安全低成本的自动充电方法,能够满足目前阶段室外低速无人车的自动充电需求。
38.为达到上述目的,本发明的技术方案为:
39.一种面向低速无人车的自动充电方法,针对室外无人化设备的自动充电,该方法包括如下步骤:
40.步骤一:充电桩端控制器上电启动之后k4、k6继电器吸合至常开端(no)此时触板与控制器信号路接通,充电桩控制器实时发送等待充电信号,此时触板只有3v左右信号电流。
41.步骤二:车端控制器上电启动之后k3、k5继电器吸合至常开端(no),此时触点与控制器信号路接通,并等待设备电量过低触发的自动充电指令。
42.步骤三:接收到用户的充电指令之后开始抓取充电桩端信号,用以保证车辆触点与触板连接可靠性,当接收到充电桩端信号之后向用户端反馈当前触板触点已可靠连接。
43.步骤四:车载控制器端向充电桩控制器端发送握手同步信号,充电桩端接收到信号之后反馈给车载端准备就绪信号,同时关闭k4、k6继电器,常闭端(nc)与公共端(com)接通,延时3s之后吸合k2继电器,触板此时与充电器接通。
44.步骤五:当车载端接收到充电桩端就绪信号之后关闭k3、k5继电器,常闭端(nc)与公共端(com)接通,为保证通讯时间差造成的两端动作不同步同样延时3s之后吸合继电器k1,此时电池与触点接通,通过之前步骤的触板触点连接确认,此时电池与充电器已完成连接,开始正式充电,同时回路中已经开始有充电电流。
45.步骤六:车载控制器与充电桩端控制器分别从各自探针处拿取回路电流,通过预设阈值判断当前回路充电电流是否正常,当发现电流超过阈值立马关闭k1、k2。同时实时向用户端上报充电状态及当前回路电流值。
46.步骤五:接收到停止充电指令或者触板触点连接中断(即车载控制器与充电桩端控制器检测到充电回路无电流)立即切断车端与桩端供电回路(关闭k1、k2),等待一段时间后k3、k5、k4、k6再次吸合切换回通信电路,等待下次握手,车载控制器向用户端上报一次故障。
47.综上所述,以上仅为本发明的较佳实施例而已,并非用于限定本发明的保护范围。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。