1.本实用新型涉及水果分级技术领域,特别是涉及一种分级设备。
背景技术:
2.水果,是指多汁且主要味觉为甜味和酸味,可食用的植物果实。水果不但含有丰富的维生素营养,而且能够促进消化,被广泛食用。
3.良好的商品分级可以使商品标准化,实行优级优价。例如对水果进行分级,还能剔除有病虫害和机械伤的产品,可以减少贮藏中的损失,减轻病虫害的传播。当前技术中的水果分级主要是以人工分级为主,通过人工对水果的大小以及表面瑕疵情况进行判断从而实现分级。该方法不但浪费人力资源,而且分级受分级人员主观判断,使得分级标准不统一,并且人工分级易对水果造成损伤。
4.由此可见,如何在对物体分级时解放人力资源,提供一种统一的分级标准是本领域技术人员亟待解决的问题。
技术实现要素:
5.本实用新型的目的是提供一种分级设备,用于在对物体分级时解放人力资源,提供一种统一的分级标准。
6.为解决上述技术问题,本实用新型提供一种分级设备,该设备包括:
7.第一摄像头、第二摄像头、传送装置、密封箱、处理器;
8.所述密封箱上设有进口和出口,所述进口的位置高于所述出口的位置;
9.所述传送装置连接所述进口和所述出口,所述传送装置包括两个平行设置的滑竿,两个所述滑竿之间镂空,用于将待分级物体由所述进口传送至所述出口;
10.所述第一摄像头和所述第二摄像头分别设置在所述密封箱两个不相邻面处,以采集所述待分级物体全方位的表面信息;
11.所述处理器连接所述第一摄像头和所述第二摄像头,以根据所述第一摄像头和所述第二摄像头采集的所述表面信息,对所述待分级物体进行分级。
12.优选的,还包括:
13.机械臂;
14.所述机械臂与所述处理器连接,由所述处理器根据分级结果控制,以将所述待分级物体分拣至对应位置。
15.优选的,还包括:
16.吸盘;
17.所述吸盘与所述处理器连接,由所述处理器根据分级结果控制,以将所述待分级物体分拣至对应位置。
18.优选的,还包括:
19.第一红外线传感器;
20.所述第一红外线传感器设置与所述密封箱的进口处,并与所述处理器连接,以在检测到所述待分级物体进入所述密封箱时输出信息至所述处理器,以使所述处理器在预设时间后控制所述第一摄像头和所述第二摄像头采集所述待分级物体的表面信息。
21.优选的,还包括:
22.卡扣;
23.所述卡扣设置在所述密封箱的进口处,并与所述处理器连接,由所述处理器在检测到所述待分级物体进入所述密封箱时启动,以阻止其他待分级物体进入所述密封箱。
24.优选的,还包括:
25.第二红外线传感器;
26.所述第二红外线传感器设置在所述密封箱的出口处,并与所述处理器连接,以使所述处理器在检测到所述待分级物体滚出所述密封箱时控制所述卡扣关闭。
27.优选的,所述第一摄像头和所述第二摄像头均为带有闪光灯的摄像头。
28.优选的,还包括:
29.第一光源和第二光源;
30.所述第一光源和所述第二光源对称设置于所述传送装置两侧。
31.优选的,还包括:
32.触摸屏;
33.所述触摸屏与所述处理器连接。
34.优选的,所述机械臂为支持6自由度的机械臂。
35.本实用新型所提供的分级设备,待分级物体从密封箱的进口进入,通过传送装置从密封箱的出口滚出。第一摄像头和第二摄像头设置在密封箱的两个不相邻面处,当待分级物体在滑竿上滚动时,第一摄像头和第二摄像头能够采集待分级物体全方位的表面信息。并将表面信息传输至处理器,处理器能够根据表面信息,对待分级物体的尺寸、表面瑕疵情况进行分析,从而对待分级物体进行分级。相对于当前技术中,对待分级物体进行人工识别判断后进行分级,采用本技术方案,由于使用两个平行设置的滑竿作为传送装置,尽可能减小待分级物体的遮挡面积,通过设置在密封箱两个不相邻面处的第一摄像头和第二摄像头,对进入密封箱的待分级物体进行拍摄以获取到待分级物体全方位的表面信息。通过处理器对表面信息进行处理,以根据待分级物体的尺寸、表面瑕疵情况对待分级物体进行分级。统一了待分级物体的分级标准,节省了人力资源,也避免了人工损伤待分级物体的情况。
附图说明
36.为了更清楚地说明本实用新型实施例,下面将对实施例中所需要使用的附图做简单的介绍,显而易见地,下面描述中的附图仅仅是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
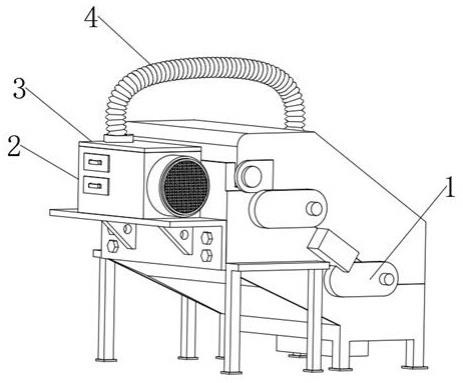
37.图1为本实用新型实施例提供的一种分级设备的结构图;
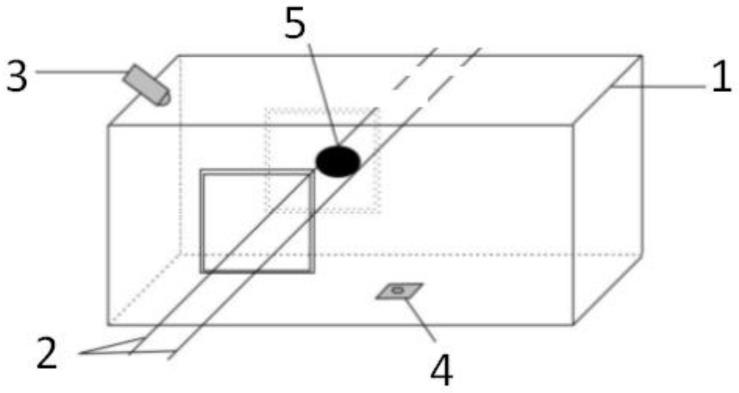
38.图2为本实用新型实施例提供的一种机械臂的结构图;
39.附图标记如下:1为密封箱,2为滑竿,3为第一摄像头,4为第二摄像头,5为待分级物体,6为一号舵机,7为二号舵机,8为三号舵机,9为四号舵机,10为五号舵机,11为六号舵
机。
具体实施方式
40.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下,所获得的所有其他实施例,都属于本实用新型保护范围。
41.本实用新型的核心是提供一种分级设备,用于在对物体分级时解放人力资源,提供一种统一的分级标准。
42.为了使本技术领域的人员更好地理解本实用新型方案,下面结合附图和具体实施方式对本实用新型作进一步的详细说明。
43.图1为本实用新型实施例提供的一种分级设备的结构图,如图1所示,该设备包括:
44.第一摄像头3、第二摄像头4、传送装置、密封箱1、处理器;
45.密封箱1上设有进口和出口,进口的位置高于出口的位置;
46.传送装置连接进口和出口,传送装置包括两个平行设置的滑竿2,两个滑竿2之间镂空,用于将待分级物体5由进口传送至出口;
47.第一摄像头3和第二摄像头4分别设置在密封箱1两个不相邻面处,以采集待分级物体5全方位的表面信息;
48.处理器连接第一摄像头3和第二摄像头4,以根据第一摄像头3和第二摄像头4采集的表面信息,对待分级物体5进行分级。
49.本实施例中是通过摄像头采集待分级物体5的表面信息,为了保证摄像头拍摄环境的统一性,在具体实施中,密封箱1由铝合金型材组成,表面采用黑色避光材质,待分级物体5通过滑竿2经过密封箱1,摄像头在待分级物体5在滑竿2上滑动的过程中拍摄。本实施例中的待分级物体5通常是苹果、芦柑等水果,由于待分级物体5种类、尺寸的不同,因此两个滑竿2的间距应当确保待分级物体5不会在滚动过程中掉落。可以理解的是,本实施例中待分级物体5的滚动速度取决于滑竿2的倾斜程度,本实施例中通过使密封箱1的进口高于出口实现对滑竿2倾斜程度的控制,在其他实施例中,当进口和出口同高度时则需调整传送装置的倾斜程度。同样的,为了保证拍摄的画面清晰,滑竿2的倾斜程度不能过大。本实施例中的传送装置用于将待分级物体从密封箱1的进口运输至出口,以在待分级物体5在密封箱1内时进行拍摄,本实施例中的传送装置可以与密封箱1的进口和出口物理连接,也可以是通过进口和出口,作为连接进口和出口的通道。如图1中示出的结构,滑竿2并不与密封箱1接触,而是经过进口和出口。
50.可以理解的是,本实施例中使用中间镂空的两个平行滑竿2作为传送装置,以尽可能的减少待分级物体5表面的遮挡面积。本实施例中的两个摄像头安装在密封箱1的两个不相邻的面上,以拍摄到待分级物体5全角度的表面信息。
51.在具体实施中,本实施例中的处理器为树莓派,利用opencv对摄像头采集的表面信息进行分析,opencv是一个基于bsd许可发行的跨平台计算机视觉和机器学习软件库,可以运行在linux、windows、android和mac os操作系统上。提供了python、ruby、matlab等语言的接口,能够实现图像处理和计算机视觉方面的很多通用算法。通过表面信息分辨待分
级物体5的尺寸和表面瑕疵程度,实现对待分级物体5的分级。
52.本实用新型实施例提供的分级设备,待分级物体从密封箱的进口进入,通过传送装置从密封箱的出口滚出。第一摄像头和第二摄像头设置在密封箱的两个不相邻面处,当待分级物体在滑竿上滚动时,第一摄像头和第二摄像头能够采集待分级物体全方位的表面信息。并将表面信息传输至处理器,处理器能够根据表面信息,对待分级物体的尺寸、表面瑕疵情况进行分析,从而对待分级物体进行分级。相对于当前技术中,对待分级物体进行人工识别判断后进行分级,采用本技术方案,由于使用两个平行设置的滑竿作为传送装置,尽可能减小待分级物体的遮挡面积,通过设置在密封箱两个不相邻面处的第一摄像头和第二摄像头,对进入密封箱的待分级物体进行拍摄以获取到待分级物体全方位的表面信息。通过处理器对表面信息进行处理,以根据待分级物体的尺寸、表面瑕疵情况对待分级物体进行分级。统一了待分级物体的分级标准,节省了人力资源,也避免了人工损伤待分级物体的情况。
53.上述实施例中介绍的分级设备实现了对待分级物体5的分级,在具体实施中,为了实现水果分级的自动化流程,在本实施例中,分级设备还包括:
54.机械臂;
55.机械臂与处理器连接,由处理器根据分级结果控制,以将待分级物体5分拣至对应位置。
56.机械臂是指高精度,多输入多输出、高度非线性、强耦合的复杂系统。图2为本实用新型实施例提供的一种机械臂的结构图,如图2所示,该机械臂包括6个舵机,其能实现6自由度的运动,提高动作灵活性,扩大工作空间范围,可以很灵活的绕过障碍物。其中,一号舵机6与二号舵机7共同组成机械臂的大臂,三号舵机8与四号舵机9组成机械臂的小臂,五号舵机10与六号舵机11组成机械臂的机械手。本实施例中,待分级物体5经过滑竿2滚出密封箱1后会传送至目标位置,处理器通过pwm控制模块控制机械臂在目标位置捡起待分级物体5并根据分级结果放入指定地点。
57.本实施例通过机械臂将待分级物体放入指定地点,实现了分级的自动化流程。
58.在具体实施中,通过机械臂运送水果会存在对水果造成损伤的情况,因此,本实施例中的分级设备还包括:
59.吸盘;
60.吸盘与处理器连接,由处理器根据分级结果控制,以将待分级物体5分拣至对应位置。
61.本实施例中使用吸盘运输水果实现分级放置,以在运输时避免对待分级物体造成损伤。
62.可以理解的是,本实施例中的摄像头是在待分级物体5在密封箱1中滚动过程中进行拍摄的,处理器对拍摄到的照片进行分析。本实施例中的两个摄像头已实现了对待分级物体5全方位的拍摄,为了节省能源消耗,两个摄像头只需同一时间各拍摄一张待分级物体5的照片即可。为了确保摄像头能够准确的拍摄到待分级物体5,在上述实施例的基础上,在本实施例中,分级设备还包括:
63.第一红外线传感器;
64.第一红外线传感器设置与密封箱1的进口处,并与处理器连接,以在检测到待分级
物体5进入密封箱1时输出信息至处理器,以使处理器在预设时间后控制第一摄像头3和第二摄像头4采集待分级物体5的表面信息。
65.本实施例中的第一红外线传感器安装在密封箱1的进口处并与处理器连接,处理器在检测到待分级物体5进入密封箱1后,控制摄像头在一定的延时后进行拍摄,以准确拍摄到全部的待分级物体5。
66.本实施例通过第一红外线传感器识别待分级物体进入密封箱的时间,反馈给处理器后使处理器设定一定的延时以在待分级物体滚动到预设位置后控制摄像头进行拍摄,实现两个摄像头各拍摄一张照片就能采集到待分级物体全部的表面信息。
67.在具体实施中,应当有多个物体需要分级,而受限于摄像头的拍摄面积以及处理器的分析能力,为了保证分级的精度,一张照片只能对一个待分级物体5进行分级,因此需要保证进入密封箱1进行拍摄的待分级物体5只有一个,因此在上述实施例的基础上,在本实施例中,还包括:
68.卡扣;
69.卡扣设置在密封箱1的进口处,并与处理器连接,由处理器在检测到待分级物体5进入密封箱1时启动,以阻止其他待分级物体5进入密封箱1。
70.本实施例通过安装在密封箱进口的卡扣,实现对进入密封箱的待分级物体的控制,当处理器通过第一红外线传感器检测到一个待分级物体进入密封箱后,可以控制卡扣启动以阻止其他的待分级物体进入,以保证只拍摄一个待分级物体的照片。
71.在上述实施例中,处理器控制卡扣启动以保证密封箱1中只拍摄一个待分级物体5,可以根据待分级物体5的滚动速度设置一定时间后控制卡扣关闭,以对下一个待分级物体5进行分级。而由于待分级物体5尺寸、重量的不同,影响滚动速度,处理器通过固定时间控制卡扣关闭不能完全控制密封箱1中只有一个待分级物体5,因此,在本实施例中,分级设备还包括:
72.第二红外线传感器;
73.第二红外线传感器设置在密封箱1的出口处,并与处理器连接,以使处理器在检测到待分级物体5滚出密封箱1时控制卡扣关闭。
74.本实施例通过第二红外线传感器检测待分级物体滚出密封箱的时间,以使处理器控制卡扣关闭以放入下一个待分级物体进行分级。
75.在具体实施中,为了保证拍摄环境的统一性常使用黑色避光材质包装密封箱1,而密封箱1内的光线不足会使摄像头拍摄的照片不清晰,透过密封箱1进口和出口的光线不足以补充光线。
76.因此,在上述实施例的基础上,在本实施例中,第一摄像头3和第二摄像头4均为带有闪光灯的摄像头。
77.本实施例中的摄像头为带闪光灯的摄像头,在拍摄时进行补光,提高拍摄照片的清晰度。
78.除了使用闪光灯作为补光器件外,还可以在密封箱1中放置固定的光源进行补光。在本实施例中,分级设备还包括:
79.第一光源和第二光源;
80.第一光源和第二光源对称设置于传送装置两侧。
81.本实施例中使用固定发光的光源进行补光,为了保证补光的均匀和一致,实现更好的补光效果,两个光源对称设置在传送装置两侧。
82.在上述实施例的基础上,在本实施例中,分级设备还包括:
83.触摸屏;
84.触摸屏与处理器连接。
85.本实施例中的触摸屏与处理器连接,可以接收处理器反馈的信息,对摄像头拍摄的照片以及最后的分级结果进行显示。同样的,触摸屏还作为人机交互设备,实现技术人员对分级流程的控制,例如控制启动停止等。
86.以上对本实用新型所提供的分级设备进行了详细介绍。说明书中各个实施例采用递进的方式描述,每个实施例重点说明的都是与其他实施例的不同之处,各个实施例之间相同相似部分互相参见即可。对于实施例公开的装置而言,由于其与实施例公开的方法相对应,所以描述的比较简单,相关之处参见方法部分说明即可。应当指出,对于本技术领域的普通技术人员来说,在不脱离本实用新型原理的前提下,还可以对本实用新型进行若干改进和修饰,这些改进和修饰也落入本实用新型权利要求的保护范围内。
87.还需要说明的是,在本说明书中,诸如第一和第二等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。而且,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。在没有更多限制的情况下,由语句“包括一个
……”
限定的要素,并不排除在包括所述要素的过程、方法、物品或者设备中还存在另外的相同要素。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。