1.本发明涉及一种分级机械操作装置,特别是涉及一种用于人参种子精准分级的机械操作装置,属于分级机械操作装置技术领域。
背景技术:
2.现有人参种植的人参种子加工,虽然国家和地方标准对人参种子的分级都有所规定,但是在实践生产操作中没有成型的机械化设备和装置,均使用人工网筛进行分级,在分级过程中不仅耗费人力,而且还存在分级不准确,等级偏差严重的问题,同时还存在分级时不能去除瘪粒以及杂质,还要在人工网筛分级后在进行人工风选,增加人力物力,同时还存在由于分级不清,引起的加工的人参种子在出苗参差不齐,存在着严重的生长优势竞争问题,生产的人参种苗会大小不一,进而影响后续的片培育人参种苗的分级。
3.而现有技术中如cn210906892u-一种人参种子筛选机要包括机架、h型连接架、u形连接架、接种盒、筛网整体、电机、连杆、摆杆、废种盒、偏心轮,所述的筛网整体通过四个摆杆悬挂在机架的顶部,u形连接架铰接在h型连接架上,电机的输出轴上安装有偏心轮,连杆的两端分别铰接在u形连接架和偏心轮上,各筛选网的出料端均设有接种盒;本实用新型实现了振动筛选以及平台式分离装置,自动化程度较高,极大地提高了人参种子的分级筛选效率,减轻了播种前的人力劳动强度,同时又不易伤种。从而有效解决了当前人参种子分级筛选效率低、以及作业劳动强度大的问题。
4.如上述现有技术虽然实现了分级筛选的功能但是还存在如下问题:
5.在使用的时候结构设计一直为倾斜的结构但是该设计会导致人参种子倒入以后倾斜结构会导致人参种子直接下落至收料仓内不便捷进行高精度的筛选,因为一些种子还没进行筛选就已经倒入至原料仓内;
6.在使用的时候虽然可以实现晃动的功能但是无法配合进行振动来提高筛分的效果并防堵塞;
7.在使用的时候相比水平振动筛选并没有滚筒筛选更加全面和效果高;
8.为此设计一种用于人参种子精准分级的机械操作装置来解决上述问题。
技术实现要素:
9.本发明的主要目的是为了提供一种用于人参种子精准分级的机械操作装置,将人参种子倒入至进料罩内,然后启动侧电动伸缩杆驱动支撑滑杆移动使其进料罩的输出端与第五筛选筒内端对接,人参种子他通过进料罩进入至第五筛选筒内,然后通过密封盖将第五筛选筒面向进料罩的一端密封,启动驱动电机调节u型架带动第五筛选筒、第四筛选筒、第三筛选筒、第二筛选筒和第一筛选筒进行旋转分选,通过驱动电机的运行进一步调节主动工型轮,通过主动工型轮带动传送带调节从动工型轮运动,通过从动工型轮调节转杆带动异形轮旋转撞击第一筛选筒并带动第一筛选筒震动筛选,通过第一筛选筒的运动产生的振动同步带动第一缓冲筒振动增加振动频率,并通过启动电动升降杆调节第一筛选筒的角
度进行晃动筛选,筛选完成后则启动电动升降杆调节第一筛选筒倾斜,使其第一筛选筒、第二筛选筒、第三筛选筒、第四筛选筒和第五筛选筒筛上的种子分别落入至第六收集仓、第五收集仓、第四收集仓、第三收集仓和第二收集仓内,通过推动l型支撑架配合第二缓冲筒和万向轮进行移动。
10.本发明的目的可以通过采用如下技术方案达到:
11.一种用于人参种子精准分级的机械操作装置,包括l型支撑架,所述l型支撑架的底部设有多组缓冲移动轮组件,所述l型支撑架的内侧顶部处铰接有旋转驱动组件,该旋转驱动组件的输出端安装有多级筛选筒组件,所述旋转驱动组件的顶部处安装有工型轮传送组件,且工型轮传送组件的输出端安装有异形轮组件,该异形轮组件与所述多级筛选筒组件相互接触,所述l型支撑架的顶部处设有与所述多级筛选筒组件相互配合的种子收集筒组件,所述l型支撑架的顶端部处安装有电动升降调节架组件,所述电动升降调节架组件的输出端与所述多级筛选筒组件的端底部处铰接,所述l型支撑架的顶端部处设有水平调节组件,该电动升降调节架组件侧顶部处安装有进料罩组件。
12.优选的,缓冲移动轮组件包括支撑腿、第二缓冲筒和万向轮以及第二连接条板,所述l型支撑架的底部安装有多组支撑腿,所述支撑腿的底部处安装有第二连接条板,该第二连接条板的底部处安装有第二缓冲筒,所述第二缓冲筒的底部安装有万向轮。
13.优选的,旋转驱动组件包括侧铰接座、驱动电机和u型架,所述l型支撑架的内侧顶部处铰接有侧铰接座,所述侧铰接座的端部处安装有驱动电机,所述驱动电机的输出端安装有u型架,所述u型架的端部处安装有多级筛选筒组件。
14.优选的,多级筛选筒组件包括第一筛选筒、第二筛选筒、第三筛选筒、第四筛选筒、第五筛选筒和侧固定环,所述侧固定环的外端部处安装有第一筛选筒,且所述第一筛选筒内逐层套设有第二筛选筒、第三筛选筒、第四筛选筒和第五筛选筒,且所述第二筛选筒、第三筛选筒、第四筛选筒和第五筛选筒的端部与所述侧固定环上固定。
15.优选的,工型轮传送组件包括从动工型轮、传送带和主动工型轮,所述驱动电机的输出端的外侧安装有主动工型轮,所述主动工型轮的外部套设有传送带,且所述传送带的内顶部处套设有从动工型轮,所述从动工型轮的侧中部处贯穿安装有异形轮组件。
16.优选的,所述异形轮组件包括转杆和异形轮,所述从动工型轮的中部贯穿设有转杆,且所述转杆的端部处安装有异形轮,且所述异形轮的锥部与所述第一筛选筒的外侧接触,所述侧铰接座的顶部处安装有连接侧板,一组转杆的端部通过轴承固定在所述连接侧板的内上方处。
17.优选的,种子收集筒组件包括第一收集仓、第五收集仓、第四收集仓、第三收集仓和第二收集仓以及以及第六收集仓,所述第一收集仓、第六收集仓、第五收集仓、第四收集仓、第三收集仓和第二收集仓依次排列安装在所述l型支撑架的内顶部处且面向所述多级筛选筒组件错落分布设置。
18.优选的,电动升降调节架组件包括电动升降杆、第一缓冲筒、第一连接条板和垂铰接座,所述l型支撑架的内顶端部处安装有电动升降杆,且所述电动升降杆的顶部处安装有第一缓冲筒,所述第一缓冲筒的顶部安装有第一连接条板,且第一连接条板的顶部铰接有垂铰接座,所述垂铰接座的顶部安装在所述外轴承套的底部处。
19.优选的,水平调节组件包括侧电动伸缩杆和滑动条,所述垂铰接座的侧顶端部处
安装有滑动条,且所述滑动条的一端安装有侧电动伸缩杆;
20.进料罩组件包括支撑滑杆和进料罩,所述侧电动伸缩杆的输出端安装有可在所述滑动条上滑动的支撑滑杆,所述支撑滑杆的顶部处安装有进料罩,所述进料罩面向所述第五筛选筒。
21.优选的,该机械操作装置还包括如下使用方法:
22.步骤一:启动电动升降杆调节外轴承套倾斜角。
23.步骤二:将人参种子倒入至进料罩内,然后启动侧电动伸缩杆驱动支撑滑杆移动使其进料罩的输出端与第五筛选筒内端对接;
24.步骤三:人参种子他通过进料罩进入至第五筛选筒内,然后通过密封盖将第五筛选筒面向进料罩的一端密封;
25.步骤四:启动驱动电机调节u型架带动第五筛选筒、第四筛选筒、第三筛选筒、第二筛选筒和第一筛选筒进行旋转分选;
26.步骤五:通过驱动电机的运行进一步调节主动工型轮,通过主动工型轮带动传送带调节从动工型轮运动,通过从动工型轮调节转杆带动异形轮旋转撞击第一筛选筒并带动第一筛选筒震动筛选;
27.步骤六:通过第一筛选筒的运动产生的振动同步带动第一缓冲筒振动增加振动频率,并通过启动电动升降杆调节第一筛选筒的角度进行晃动筛选;
28.步骤七:筛选完成后则启动电动升降杆调节第一筛选筒倾斜,使其第一筛选筒、第二筛选筒、第三筛选筒、第四筛选筒和第五筛选筒筛上的种子分别落入至第六收集仓、第五收集仓、第四收集仓、第三收集仓和第二收集仓内;
29.步骤八:通过推动l型支撑架配合第二缓冲筒和万向轮进行移动。
30.本发明的有益技术效果:
31.本发明提供的一种用于人参种子精准分级的机械操作装置,将人参种子倒入至进料罩内,然后启动侧电动伸缩杆驱动支撑滑杆移动使其进料罩的输出端与第五筛选筒内端对接,人参种子他通过进料罩进入至第五筛选筒内,然后通过密封盖将第五筛选筒面向进料罩的一端密封,启动驱动电机调节u型架带动第五筛选筒、第四筛选筒、第三筛选筒、第二筛选筒和第一筛选筒进行旋转分选,通过驱动电机的运行进一步调节主动工型轮,通过主动工型轮带动传送带调节从动工型轮运动,通过从动工型轮调节转杆带动异形轮旋转撞击第一筛选筒并带动第一筛选筒震动筛选,通过第一筛选筒的运动产生的振动同步带动第一缓冲筒振动增加振动频率,并通过启动电动升降杆调节第一筛选筒的角度进行晃动筛选,筛选完成后则启动电动升降杆调节第一筛选筒倾斜,使其第一筛选筒、第二筛选筒、第三筛选筒、第四筛选筒和第五筛选筒筛上的种子分别落入至第六收集仓、第五收集仓、第四收集仓、第三收集仓和第二收集仓内,通过推动l型支撑架配合第二缓冲筒和万向轮进行移动。
附图说明
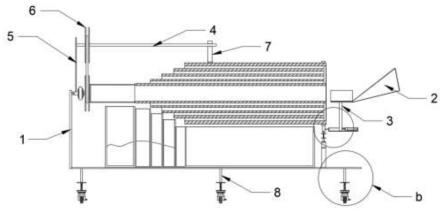
32.图1为按照本发明的一种用于人参种子精准分级的机械操作装置的一优选实施例的装置整体结构示意图;
33.图2为按照本发明的一种用于人参种子精准分级的机械操作装置的一优选实施例的驱动组件、工型轮传动组件和异形轮撞击组件组合结构示意图;
34.图3为按照本发明的一种用于人参种子精准分级的机械操作装置的一优选实施例的筛选滚筒组件结构示意图;
35.图4为按照本发明的一种用于人参种子精准分级的机械操作装置的一优选实施例的a处结构放大图;
36.图5为按照本发明的一种用于人参种子精准分级的机械操作装置的一优选实施例的b处结构放大图;
37.图6为按照本发明的一种用于人参种子精准分级的机械操作装置的一优选实施例的种子收集仓组件结构示意图。
38.图中:1-l型支撑架,2-进料罩,3-支撑滑杆,4-转杆,5-连接侧板,6-从动工型轮,7-异形轮,8-支撑腿,9-u型架,10-主动工型轮,11-传送带,12-驱动电机,13-侧铰接座,14-第一筛选筒,15-第二筛选筒,16-第三筛选筒,17-第四筛选筒,18-第五筛选筒,19-侧固定环,20-外轴承套,21-垂铰接座,22-第一连接条板,23-第一缓冲筒,24-电动升降杆,25-第一收集仓,26-侧电动伸缩杆,27-滑动条,28-万向轮,29-第二缓冲筒,30-第二收集仓,31-第三收集仓,32-第四收集仓,33-第五收集仓,34-第六收集仓。
具体实施方式
39.为使本领域技术人员更加清楚和明确本发明的技术方案,下面结合实施例及附图对本发明作进一步详细的描述,但本发明的实施方式不限于此。
40.如图1-图6所示,本实施例提供的一种用于人参种子精准分级的机械操作装置,包括l型支撑架1,l型支撑架1的底部设有多组缓冲移动轮组件,l型支撑架1的内侧顶部处铰接有旋转驱动组件,该旋转驱动组件的输出端安装有多级筛选筒组件,旋转驱动组件的顶部处安装有工型轮传送组件,且工型轮传送组件的输出端安装有异形轮组件,该异形轮组件与多级筛选筒组件相互接触,l型支撑架1的顶部处设有与多级筛选筒组件相互配合的种子收集筒组件,l型支撑架1的顶端部处安装有电动升降调节架组件,电动升降调节架组件的输出端与多级筛选筒组件的端底部处铰接,l型支撑架1的顶端部处设有水平调节组件,该电动升降调节架组件侧顶部处安装有进料罩组件。
41.将人参种子倒入至进料罩2内,然后启动侧电动伸缩杆26驱动支撑滑杆3移动使其进料罩2的输出端与第五筛选筒18内端对接,人参种子他通过进料罩2进入至第五筛选筒18内,然后通过密封盖将第五筛选筒18面向进料罩2的一端密封,启动驱动电机12调节u型架9带动第五筛选筒18、第四筛选筒17、第三筛选筒16、第二筛选筒15和第一筛选筒14进行旋转分选,通过驱动电机12的运行进一步调节主动工型轮10,通过主动工型轮10带动传送带11调节从动工型轮6运动,通过从动工型轮6调节转杆4带动异形轮7旋转撞击第一筛选筒14并带动第一筛选筒14震动筛选,通过第一筛选筒14的运动产生的振动同步带动第一缓冲筒23振动增加振动频率,并通过启动电动升降杆24调节第一筛选筒14的角度进行晃动筛选,筛选完成后则启动电动升降杆24调节第一筛选筒14倾斜,使其第一筛选筒14、第二筛选筒15、第三筛选筒16、第四筛选筒17和第五筛选筒18筛上的种子分别落入至第六收集仓34、第五收集仓33、第四收集仓32、第三收集仓31和第二收集仓30内,通过推动l型支撑架1配合第二缓冲筒29和万向轮28进行移动。
42.在本实施例中,缓冲移动轮组件包括支撑腿8、第二缓冲筒29和万向轮28以及第二
连接条板,l型支撑架1的底部安装有多组支撑腿8,支撑腿8的底部处安装有第二连接条板,该第二连接条板的底部处安装有第二缓冲筒29,第二缓冲筒29的底部安装有万向轮28。
43.在本实施例中,旋转驱动组件包括侧铰接座13、驱动电机12和u型架9,l型支撑架1的内侧顶部处铰接有侧铰接座13,侧铰接座13的端部处安装有驱动电机12,驱动电机12的输出端安装有u型架9,u型架9的端部处安装有多级筛选筒组件。
44.在本实施例中,多级筛选筒组件包括第一筛选筒14、第二筛选筒15、第三筛选筒16、第四筛选筒17、第五筛选筒18和侧固定环19,侧固定环19的外端部处安装有第一筛选筒14,且第一筛选筒14内逐层套设有第二筛选筒15、第三筛选筒16、第四筛选筒17和第五筛选筒18,且第二筛选筒15、第三筛选筒16、第四筛选筒17和第五筛选筒18的端部与侧固定环19上固定。
45.在本实施例中,工型轮传送组件包括从动工型轮6、传送带11和主动工型轮10,驱动电机12的输出端的外侧安装有主动工型轮10,主动工型轮10的外部套设有传送带11,且传送带11的内顶部处套设有从动工型轮6,从动工型轮6的侧中部处贯穿安装有异形轮组件。
46.在本实施例中,异形轮组件包括转杆4和异形轮7,从动工型轮6的中部贯穿设有转杆4,且转杆4的端部处安装有异形轮7,且异形轮7的锥部与第一筛选筒14的外侧接触,侧铰接座13的顶部处安装有连接侧板5,一组转杆4的端部通过轴承固定在连接侧板5的内上方处。
47.在本实施例中,种子收集筒组件包括第一收集仓25、第六收集仓34、第五收集仓33、第四收集仓32、第三收集仓31以及第二收集仓30,第一收集仓25、第六收集仓34、第五收集仓33、第四收集仓32、第三收集仓31和第二收集仓30依次排列安装在l型支撑架1的内顶部处且面向多级筛选筒组件错落分布设置。
48.在本实施例中,电动升降调节架组件包括电动升降杆24、第一缓冲筒23、第一连接条板22和垂铰接座21,l型支撑架1的内顶端部处安装有电动升降杆24,且电动升降杆24的顶部处安装有第一缓冲筒23,第一缓冲筒23的顶部安装有第一连接条板22,且第一连接条板22的顶部铰接有垂铰接座21,垂铰接座21的顶部安装在外轴承套20的底部处。
49.在本实施例中,水平调节组件包括侧电动伸缩杆26和滑动条27,所述垂铰接座21的侧顶端部处安装有滑动条27,且滑动条27的一端安装有侧电动伸缩杆26;
50.进料罩组件包括支撑滑杆3和进料罩2,侧电动伸缩杆26的输出端安装有可在滑动条27上滑动的支撑滑杆3,支撑滑杆3的顶部处安装有进料罩2,进料罩2面向第五筛选筒18。
51.在本实施例中,该机械操作装置还包括如下使用方法:
52.步骤一:步骤一:启动电动升降杆24调节外轴承套20倾斜角。
53.步骤二:将人参种子倒入至进料罩2内,然后启动侧电动伸缩杆26驱动支撑滑杆3移动使其进料罩2的输出端与第五筛选筒18内端对接;
54.步骤三:人参种子他通过进料罩2进入至第五筛选筒18内,然后通过密封盖将第五筛选筒18面向进料罩2的一端密封;
55.步骤四:启动驱动电机12调节u型架9带动第五筛选筒18、第四筛选筒17、第三筛选筒16、第二筛选筒15和第一筛选筒14进行旋转分选;
56.步骤五:通过驱动电机12的运行进一步调节主动工型轮10,通过主动工型轮10带
动传送带11调节从动工型轮6运动,通过从动工型轮6调节转杆4带动异形轮7旋转撞击第一筛选筒14并带动第一筛选筒14震动筛选;
57.步骤六:通过第一筛选筒14的运动产生的振动同步带动第一缓冲筒23振动增加振动频率,并通过启动电动升降杆24调节第一筛选筒14的角度进行晃动筛选;
58.步骤七:筛选完成后则启动电动升降杆24调节第一筛选筒14倾斜,使其第一筛选筒14、第二筛选筒15、第三筛选筒16、第四筛选筒17和第五筛选筒18筛上的种子分别落入至第六收集仓34、第五收集仓33、第四收集仓32、第三收集仓31和第二收集仓30内;
59.步骤八:通过推动l型支撑架1配合第二缓冲筒29和万向轮28进行移动。
60.以上,仅为本发明进一步的实施例,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明所公开的范围内,根据本发明的技术方案及其构思加以等同替换或改变,都属于本发明的保护范围。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。