1.本发明涉及导航技术领域,尤其涉及一种汽车夜间行驶导航定位系统。
背景技术:
2.从世界上第一辆汽车的诞生到现在,汽车业界的百花齐放和欣欣向荣,汽车是“改变世界的机器”、推动社会进步的车轮,已经成为人们日常生活中不可或缺的重要组成部分。汽车的普遍使用,将改变经济社会结构,形成一整套新的经济、文化、生活体系,改善人的生活质量,推进社会进步,促进了经济发展,但汽车作为家庭出行的交通工具,给人们的生活带来很大便利的同时,也存在一些的问题,例如在夜间行驶时,因夜间视线不清晰以及驾驶员不熟悉交通路线的情况下,将会给出行带来了不必要的麻烦,甚至存在交通隐患。因此,各种导航系统或导航仪应运而生,并利用车载gps(全球定位系统)配合电子地图来进行的,它能方便且准确地告诉驾驶者去往目的地的最短或者最快路径,是驾驶员的好帮手。
3.对于上述现有汽车应用的导航系统或导航仪中的车载gps导航系统,在工作时必须要同时接收到四颗或是四颗以上的有效卫星信号才能正确定位车辆位置,一旦当车辆行驶在隧道和城市的高楼群之间时,车载gps导航系统会因为卫星信号的衰减,而很难实现对车辆行驶的位置进行导航精准定位,从而给出行带来了不必要的麻烦,甚至在夜间行驶时,因视线差碰到障碍物时,还会严重造成交通隐患。
4.为此,本发明提供一种汽车夜间行驶导航定位系统来解决上述问题。
技术实现要素:
5.本发明的目的是为了解决现有技术中汽车用导航系统中的gps导航系统定位较差的问题,而提出的一种汽车夜间行驶导航定位系统。
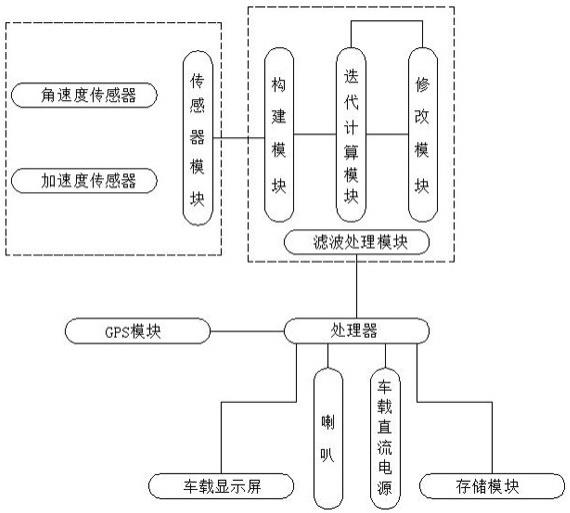
6.为了实现上述目的,本发明采用了如下技术方案:一种汽车夜间行驶导航定位系统,包括gps模块、传感器模块、滤波处理模块和处理器,所述传感器模块与滤波处理模块电连,所述gps模块、滤波处理模块均与处理器电连;所述gps模块,用于接收卫星信号,并采用gps定位算法计算车辆的当前位置作为实时定位数据;所述传感器模块,用于获取车辆角速度的量测信息和车辆速度的量测信息;所述滤波处理模块,用于对车辆的角速度量测信息和车辆速度的量测信息分别进行卡尔曼滤波,并在线调整卡尔曼滤波器参数得到降噪后的车辆的角速度量测信息和车辆速度的量测信息;所述处理器,用于利用车辆的角速度量测信息和车辆速度的量测信息进行导航解算,输出被测载体的导航信息;所述滤波处理模块包括构建模块、迭代计算模块和修改模块,其中:所述构建模块,用于建立关于传感器模块单输入单输出卡尔曼滤波状态观测方程;所述迭代计算模块,用于进行卡尔曼滤波迭代计算,并根据残差2χ检测法得到检测函数值与预先设定的阈值进行比较,得出被测载体的机动变化情况;所述修改模块,用于根据被测载体的机动变化情况调整卡尔曼滤波器的滤波增益矩阵数值和观测噪声方差矩阵的数
值,并将调整后的值反馈给迭代计算模块。
7.优选的,所述传感器模块包括角速度传感器、加速度传感器,其中:所述角速度传感器,用于获取车辆角速度的量测信息;所述加速度传感器,用于获取车辆速度的量测信息。
8.优选的,所述角速度传感器为三轴陀螺仪,所述加速度传感器采用三轴加速度传感器。
9.优选的,所述三轴陀螺仪是通过测量三维坐标系内陀螺转子的垂直轴与载体之间的夹角,并计算角速度,通过夹角和角速度来判别物体在三维空间的运动状态,同时测定上、下、左、右、前、后六个方向,最终可判断出载体的移动轨迹和加速度。
10.优选的,所述三轴加速度传感器是感知任意方向上加速度,通过测量载体在某个轴向的受力情况,计算出轴向的加速度大小和方向。
11.优选的,所述处理器设置dp1.2、pciem.2、type-c、usb3.0数据传输和显示接口,且pciem.2为bkey,用于高速wi-fi和ssd存储设备扩展,并支持九类扩展接口。
12.优选的,还包括存储模块、车载显示屏和喇叭,所述存储模块、车载显示屏、喇叭均与处理器电连;所述存储模块,用于保存导航引擎、地图数据以及gps模块计算出的实时位置;所述车载显示屏,用于显示车辆的当前位置、当前行驶速度、当前时间、离目的地的距离以及需要的时间;所述喇叭,用于对车辆的行进方向进行提示。
13.优选的,还包括9v-36v的车载直流电源,所述车载直流电源与处理器电连。
14.与现有技术相比,本发明提供了一种汽车夜间行驶导航定位系统,具备以下有益效果:1、该汽车夜间行驶导航定位系统,通过基于角速度传感器和加速度传感器工作过程无需卫星定位,所以处理器能够依据角速度传感器获取车辆的角速度变化量,得到车辆的运行方向,和加速度传感器获取车辆的速度变化量,得到车辆行进的距离,即可实现该系统在无需卫星定位的情况下,仍可以实现对车辆的精准实时导航定位,同时当gps模块在接收到4颗以上gps卫星的卫星信号时,gps模块可与角速度传感器和加速度传感器组成的传感器模块同时配合使用,进一步提高该汽车用导航系统对车辆定位的精确度。
15.2、该汽车夜间行驶导航定位系统,通过构建模块、迭代计算模块和修改模块构成的滤波处理模块,对角速度传感器和加速度传感器测数据中的随机噪声进行了有效的处理,使角速度传感器对车辆获取的角速度变化量和加速度传感器对车辆获取的速度变化量更为精确,并避免当gps模块在接收小于4颗gps卫星的卫星信号或没有时,可通过角速度传感器获取车辆角速度的量测信息和加速度传感器获取车辆速度的量测信息,也能精准实现对车辆的导航定位。
附图说明
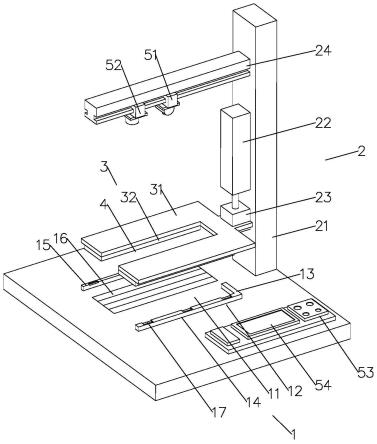
16.图1为本发明提出的一种汽车夜间行驶导航定位系统的原理连接框图;图2为本发明提出的一种汽车夜间行驶导航定位系统的gps模块与gps卫星之间的位置关系示意图。
具体实施方式
17.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。
18.在本发明的描述中,需要理解的是,术语“上”、“下”、“前”、“后”、“左”、“右”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
19.实施例1:参照图1-图2,一种汽车夜间行驶导航定位系统,包括gps模块、传感器模块、滤波处理模块和处理器,传感器模块与滤波处理模块电连,gps模块、滤波处理模块均与处理器电连;gps模块,用于接收卫星信号,并采用gps定位算法计算车辆的当前位置作为实时定位数据;传感器模块,用于获取车辆角速度的量测信息和车辆速度的量测信息;滤波处理模块,用于对车辆的角速度量测信息和车辆速度的量测信息分别进行卡尔曼滤波,并在线调整卡尔曼滤波器参数得到降噪后的车辆的角速度量测信息和车辆速度的量测信息;处理器,用于利用车辆的角速度量测信息和车辆速度的量测信息进行导航解算,输出被测载体的导航信息;滤波处理模块包括构建模块、迭代计算模块和修改模块,其中:构建模块,用于建立关于传感器模块单输入单输出卡尔曼滤波状态观测方程;迭代计算模块,用于进行卡尔曼滤波迭代计算,并根据残差2χ检测法得到检测函数值与预先设定的阈值进行比较,得出被测载体的机动变化情况;修改模块,用于根据被测载体的机动变化情况调整卡尔曼滤波器的滤波增益矩阵数值和观测噪声方差矩阵的数值,并将调整后的值反馈给迭代计算模块。
20.在一些实施例中,传感器模块包括角速度传感器、加速度传感器,其中:角速度传感器,用于获取车辆角速度的量测信息;加速度传感器,用于获取车辆速度的量测信息。
21.在一些实施例中,角速度传感器为三轴陀螺仪,加速度传感器采用三轴加速度传感器。
22.在一些实施例中,三轴陀螺仪是通过测量三维坐标系内陀螺转子的垂直轴与载体之间的夹角,并计算角速度,通过夹角和角速度来判别物体在三维空间的运动状态,同时测定上、下、左、右、前、后六个方向,最终可判断出载体的移动轨迹和加速度。
23.在一些实施例中,三轴加速度传感器是感知任意方向上加速度,通过测量载体在某个轴向的受力情况,计算出轴向的加速度大小和方向。
24.在一些实施例中,处理器设置dp1.2、pciem.2、type-c、usb3.0数据传输和显示接口,且pciem.2为bkey,用于高速wi-fi和ssd存储设备扩展,并支持九类扩展接口。
25.在一些实施例中,还包括存储模块、车载显示屏和喇叭,存储模块、车载显示屏、喇叭均与处理器电连;存储模块,用于保存导航引擎、地图数据以及gps模块计算出的实时位置;车载显示屏,用于显示车辆的当前位置、当前行驶速度、当前时间、离目的地的距
离以及需要的时间;喇叭,用于对车辆的行进方向进行提示。
26.在一些实施例中,还包括9v-36v的车载直流电源,车载直流电源与处理器电连。
27.本实施例中,通过由角速度传感器和加速度传感器构成的传感器模块,是基于gps模块在接收小于4颗gps卫星的卫星信号或没有时,为了保证该汽车用导航系统还能对汽车行驶位置进行导航定位,可通过角速度传感器获取车辆的角速度变化量时,处理器根据车辆的角速度变化量能够得出车辆的运行方向,然后再通过加速度传感器获取车辆的速度变化量时,处理器根据车辆的速度变化量能够得出车辆行进的距离,在得到车辆运行方向和车辆行进距离时,并采用距离交会法即可得出车辆经度、纬度、高度和时间修正量这四个参数,实现车载导航系统中的gps模块在接收不到卫星信号或是在信号质量很差的情况下,仍然可实现对车辆的实时导航定位。
28.实施例2:参照图1-图2,一种汽车夜间行驶导航定位系统,包括gps模块、传感器模块、滤波处理模块和处理器,传感器模块与滤波处理模块电连,gps模块、滤波处理模块均与处理器电连;gps模块,用于接收卫星信号,并采用gps定位算法计算车辆的当前位置作为实时定位数据;传感器模块,用于获取车辆角速度的量测信息和车辆速度的量测信息;滤波处理模块,用于对车辆的角速度量测信息和车辆速度的量测信息分别进行卡尔曼滤波,并在线调整卡尔曼滤波器参数得到降噪后的车辆的角速度量测信息和车辆速度的量测信息;处理器,用于利用车辆的角速度量测信息和车辆速度的量测信息进行导航解算,输出被测载体的导航信息;滤波处理模块包括构建模块、迭代计算模块和修改模块,其中:构建模块,用于建立关于传感器模块单输入单输出卡尔曼滤波状态观测方程;迭代计算模块,用于进行卡尔曼滤波迭代计算,并根据残差2χ检测法得到检测函数值与预先设定的阈值进行比较,得出被测载体的机动变化情况;修改模块,用于根据被测载体的机动变化情况调整卡尔曼滤波器的滤波增益矩阵数值和观测噪声方差矩阵的数值,并将调整后的值反馈给迭代计算模块。
29.在一些实施例中,传感器模块包括角速度传感器、加速度传感器,其中:角速度传感器,用于获取车辆角速度的量测信息;加速度传感器,用于获取车辆速度的量测信息。
30.在一些实施例中,角速度传感器为三轴陀螺仪,加速度传感器采用三轴加速度传感器。
31.在一些实施例中,三轴陀螺仪是通过测量三维坐标系内陀螺转子的垂直轴与载体之间的夹角,并计算角速度,通过夹角和角速度来判别物体在三维空间的运动状态,同时测定上、下、左、右、前、后六个方向,最终可判断出载体的移动轨迹和加速度。
32.在一些实施例中,三轴加速度传感器是感知任意方向上加速度,通过测量载体在某个轴向的受力情况,计算出轴向的加速度大小和方向。
33.在一些实施例中,处理器设置dp1.2、pciem.2、type-c、usb3.0数据传输和显示接口,且pciem.2为bkey,用于高速wi-fi和ssd存储设备扩展,并支持九类扩展接口。
34.在一些实施例中,还包括存储模块、车载显示屏和喇叭,存储模块、车载显示屏、喇叭均与处理器电连;存储模块,用于保存导航引擎、地图数据以及gps模块计算出的实时位置;车载显示屏,用于显示车辆的当前位置、当前行驶速度、当前时间、离目的地的距离以及需要的时间;喇叭,用于对车辆的行进方向进行提示。
35.在一些实施例中,还包括9v-36v的车载直流电源,车载直流电源与处理器电连。
36.本实施例中的gps模块采用gps定位算法计算车辆的当前位置作为实时定位数据,具体如下:当gps模块在接收到4颗以上gps卫星的卫星信号时,可根据这些卫星信号到达被测gps导航系统的时间,基于gps定位算法,构建如下方程组:[(x1-x)2 (y1-y)2 (z1-z)2 (x1-x)]2 (vt1-vt0)2=d1[(x2-x)2 (y2-y)2 (z2-z)2 (x1-x)]2 (vt2-vt0)2=d2[(x3-x)2 (y3-y)2 (z3-z)2 (x1-x)]2 (vt3-vt0)2=d3[(x4-x)2 (y4-y)2 (z4-z)2 (x1-x)]2 (vt4-vt0)2=d4其中,(x,y,z)表示gps导航系统的坐标,(xi,yi,zi),i=1,2,3,4,分别为卫星1、卫星2、卫星3、卫星4在t时刻的空间直角坐标,可由接收的卫星信号的卫星导航电文求得,di(i=1、2、3、4)分别为卫星1、卫星2、卫星3、卫星4到被测gps导航系统之间的距离,通过公式di=c
△
ti求解获得;其中,c表示gps信号光速的传播速度,
△
ti(i=1、2、3、4)分别为卫星1、卫星2、卫星3、卫星4的信号到达被测机所经历的时间,通过测量获得,可具体在卫星广播星历信号时,信号内容含有发射信号时候的星载时钟a,被测机接收到此卫星信号的时候计为b,则卫星的信号到达被测机所经历的时间
△
t=b-a,vti(i=1、2、3、4)分别为卫星1、卫星2、卫星3、卫星4的卫星钟的钟差,由卫星星历即卫星导航电文提供,vt0表示被测gps导航系统的钟差;通过上述以上方程组即可求解获得被测gps导航系统的x、y、z坐标和钟差vt0,从而获得系统的当前位置,同时对于上述构建的方程组,还需要进一步说明的是,至少要有4颗卫星信号才能组成有效解算被测gps导航系统位置及钟差的方程组,每多接收一颗可多列一个方程,减少位置计算的误差,实际计算时,接收到的有效卫星信号均被用于进行计算;当gps模块在接收小于4颗gps卫星的卫星信号或没有时,可通过传感器模块中包括的角速度传感器获取车辆角速度的量测信息和加速度传感器获取车辆速度的量测信息,并通过对车辆的角速度变化量的计算得到车辆的运行方向,通过对车辆速度的计算得到车辆行进的距离,如此实现对车辆的导航定位,并有效解决了没有卫星信号的情况下,也能实现对车辆的定位或因大城市中的高楼建筑楼群对gps信号衰减,而出现的卫星信号质量不稳定的车辆导航定位,并且,当卫星信号接收正常时,gps模块和传感器模块也可以同时配合使用,从而大大提高对车辆定位的精确度。
[0037]
实施例3:参照图1-图2,一种汽车夜间行驶导航定位系统,包括gps模块、传感器模块、滤波
处理模块和处理器,传感器模块与滤波处理模块电连,gps模块、滤波处理模块均与处理器电连;gps模块,用于接收卫星信号,并采用gps定位算法计算车辆的当前位置作为实时定位数据;传感器模块,用于获取车辆角速度的量测信息和车辆速度的量测信息;滤波处理模块,用于对车辆的角速度量测信息和车辆速度的量测信息分别进行卡尔曼滤波,并在线调整卡尔曼滤波器参数得到降噪后的车辆的角速度量测信息和车辆速度的量测信息;处理器,用于利用车辆的角速度量测信息和车辆速度的量测信息进行导航解算,输出被测载体的导航信息;滤波处理模块包括构建模块、迭代计算模块和修改模块,其中:构建模块,用于建立关于传感器模块单输入单输出卡尔曼滤波状态观测方程;迭代计算模块,用于进行卡尔曼滤波迭代计算,并根据残差2χ检测法得到检测函数值与预先设定的阈值进行比较,得出被测载体的机动变化情况;修改模块,用于根据被测载体的机动变化情况调整卡尔曼滤波器的滤波增益矩阵数值和观测噪声方差矩阵的数值,并将调整后的值反馈给迭代计算模块。
[0038]
在一些实施例中,传感器模块包括角速度传感器、加速度传感器,其中:角速度传感器,用于获取车辆角速度的量测信息;加速度传感器,用于获取车辆速度的量测信息。
[0039]
在一些实施例中,角速度传感器为三轴陀螺仪,加速度传感器采用三轴加速度传感器。
[0040]
在一些实施例中,三轴陀螺仪是通过测量三维坐标系内陀螺转子的垂直轴与载体之间的夹角,并计算角速度,通过夹角和角速度来判别物体在三维空间的运动状态,同时测定上、下、左、右、前、后六个方向,最终可判断出载体的移动轨迹和加速度。
[0041]
在一些实施例中,三轴加速度传感器是感知任意方向上加速度,通过测量载体在某个轴向的受力情况,计算出轴向的加速度大小和方向。
[0042]
在一些实施例中,处理器设置dp1.2、pciem.2、type-c、usb3.0数据传输和显示接口,且pciem.2为bkey,用于高速wi-fi和ssd存储设备扩展,并支持九类扩展接口。
[0043]
在一些实施例中,还包括存储模块、车载显示屏和喇叭,存储模块、车载显示屏、喇叭均与处理器电连;存储模块,用于保存导航引擎、地图数据以及gps模块计算出的实时位置;车载显示屏,用于显示车辆的当前位置、当前行驶速度、当前时间、离目的地的距离以及需要的时间;喇叭,用于对车辆的行进方向进行提示。
[0044]
在一些实施例中,还包括9v-36v的车载直流电源,车载直流电源与处理器电连。
[0045]
本实施例中的构建模块,用于分别建立关于传感器模块中角速度传感器和加速度传感器单输入单输出卡尔曼滤波状态方程和观测方程,具体步骤如下:对于加速度传感器,假设在一个短暂的采样周期内,载体线速率可表示为一个定值,那么加速度传感器的状态方程和观测方程可以表示为:z(t)=[0 1]
·
x(t) v(t)=ca
·
x(t) v(t)然后对加速度传感器的状态方程和观测方程进行离散化处理,
φa≈i t
·
f,ga≈t
·
ba,ha=ca得到离散化后加速度传感器的系统状态方程为:xk 1=φa
·
xk ga
·
wk观测方程为:zk 1=ha
·
xk 1 vk 1其中,v为线速度,a为线加速度,w(t)为t时刻2
×
1维的系统过程噪声向量,z(t)为t时刻加速度传感器的量测信息,v(t)为t时刻1
×
1的量测噪声向量,t为采样时间间隔;对于角速度传感器,假设在一个短暂的采样周期内,载体角速率可表示为一个定值,那么角速度传感器的状态方程和观测方程可以表示为:z(t)=[1 0]
·
x(t) v(t)=cg
·
x(t) v(t)然后对角速度传感器的状态方程和观测方程进行离散化处理,φg≈i t
·
f,gg≈t
·
bg,hg=cg得到角速度传感器散化后的系统状态方程为:xk 1=φg
·
xk gg
·
wk观测方程为:zk 1=hg
·
xk 1 vk 1其中,ω为角速率,ε为角加速度,w(t)为t时刻2
×
1维的系统过程噪声向量,z(t)为t时刻角速度传感器的量测信息,v(t)为t时刻1
×
1的量测噪声,t为采样时间间隔;本实施例中,通过滤波处理模块中的角速度传感器和加速度传感器的特性分别建立了单输入单输出的卡尔曼滤波状态方程和观测方程,使滤波处理模块将角速度传感器和加速度传感器量测噪声作为卡尔曼滤波系统的观测噪声处理,且利用了卡尔曼的工作特性,从而能够有效降低了角速度传感器和加速度传感器量测数据中的随机噪声,当gps模块在接收不到卫星信号或是在信号质量很差的情况下,本发明实施例中提供的角速度传感器和加速度传感器在无需卫星定位的情况下,仍可以实现对车辆的精准实时导航定位。
[0046]
实施例4:参照图1-图2,一种汽车夜间行驶导航定位系统,包括gps模块、传感器模块、滤波处理模块和处理器,传感器模块与滤波处理模块电连,gps模块、滤波处理模块均与处理器电连;gps模块,用于接收卫星信号,并采用gps定位算法计算车辆的当前位置作为实时定位数据;传感器模块,用于获取车辆角速度的量测信息和车辆速度的量测信息;滤波处理模块,用于对车辆的角速度量测信息和车辆速度的量测信息分别进行卡尔曼滤波,并在线调整卡尔曼滤波器参数得到降噪后的车辆的角速度量测信息和车辆速度的量测信息;处理器,用于利用车辆的角速度量测信息和车辆速度的量测信息进行导航解算,输出被测载体的导航信息;滤波处理模块包括构建模块、迭代计算模块和修改模块,其中:构建模块,用于建立关于传感器模块单输入单输出卡尔曼滤波状态观测方程;迭代计算模块,用于进行卡尔曼滤波迭代计算,并根据残差2χ检测法得到检测函数值与预先设定的阈值进行比较,得出被测载体的机动变化情况;修改模块,用于根据被测载体的机动变化情况调整卡尔曼滤波器的滤波增益矩阵数值和观测噪声方差矩阵的数值,并将调整后的值反馈给迭代计算模块。
[0047]
在一些实施例中,传感器模块包括角速度传感器、加速度传感器,其中:角速度传感器,用于获取车辆角速度的量测信息;加速度传感器,用于获取车辆速度的量测信息。
[0048]
在一些实施例中,角速度传感器为三轴陀螺仪,加速度传感器采用三轴加速度传感器。
[0049]
在一些实施例中,三轴陀螺仪是通过测量三维坐标系内陀螺转子的垂直轴与载体之间的夹角,并计算角速度,通过夹角和角速度来判别物体在三维空间的运动状态,同时测定上、下、左、右、前、后六个方向,最终可判断出载体的移动轨迹和加速度。
[0050]
在一些实施例中,三轴加速度传感器是感知任意方向上加速度,通过测量载体在某个轴向的受力情况,计算出轴向的加速度大小和方向。
[0051]
在一些实施例中,处理器设置dp1.2、pciem.2、type-c、usb3.0数据传输和显示接口,且pciem.2为bkey,用于高速wi-fi和ssd存储设备扩展,并支持九类扩展接口。
[0052]
在一些实施例中,还包括存储模块、车载显示屏和喇叭,存储模块、车载显示屏、喇叭均与处理器电连;存储模块,用于保存导航引擎、地图数据以及gps模块计算出的实时位置;车载显示屏,用于显示车辆的当前位置、当前行驶速度、当前时间、离目的地的距离以及需要的时间;喇叭,用于对车辆的行进方向进行提示。
[0053]
在一些实施例中,还包括9v-36v的车载直流电源,车载直流电源与处理器电连。
[0054]
本实施例中,考虑到角速度传感器和加速度传感器一般运用在车辆的动态环境中,为了保证角速度传感器和加速度传感器的量测值,在经滤波后的结果能够实时跟随载体的机动,所以本实施例中设计了迭代计算模块和修改模块,通过迭代计算模块采用残差χ2检测法对载体机动变化情况进行实时监测,当检测函数值大于阈值时,说明系统处于快速机动变化的情况,当检测函数的值小于阈值时,说明系统的机动变化缓慢或者处于静止或匀速运动状态,并利用残差χ2检测法对载体机动变化情况进行实时监测的功能,最后再根据机动情况在线调整卡尔曼滤波的滤波增益阵数值和观测噪声方差阵数值,保证该系统还能够适应车辆动、静态环境下的加速度传感器和角速度传感器的随机噪声处理,进一步提高了角速度传感器对车辆获取角速度变化量和加速度传感器对车辆获取速度变化量数值的准确性。
[0055]
以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。