技术特征:
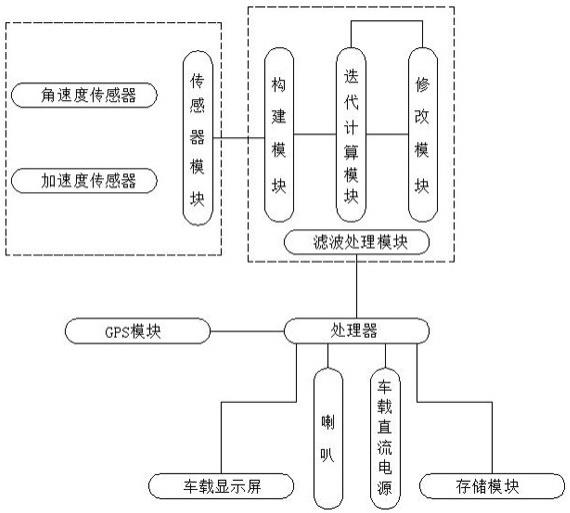
1.一种汽车夜间行驶导航定位系统,其特征在于,包括gps模块、传感器模块、滤波处理模块和处理器,所述传感器模块与滤波处理模块电连,所述gps模块、滤波处理模块均与处理器电连;所述gps模块,用于接收卫星信号,并采用gps定位算法计算车辆的当前位置作为实时定位数据;所述传感器模块,用于获取车辆角速度的量测信息和车辆速度的量测信息;所述滤波处理模块,用于对车辆的角速度量测信息和车辆速度的量测信息分别进行卡尔曼滤波,并在线调整卡尔曼滤波器参数得到降噪后的车辆的角速度量测信息和车辆速度的量测信息;所述处理器,用于利用车辆的角速度量测信息和车辆速度的量测信息进行导航解算,输出被测载体的导航信息;所述滤波处理模块包括构建模块、迭代计算模块和修改模块,其中:所述构建模块,用于建立关于传感器模块单输入单输出卡尔曼滤波状态观测方程;所述迭代计算模块,用于进行卡尔曼滤波迭代计算,并根据残差2χ检测法得到检测函数值与预先设定的阈值进行比较,得出被测载体的机动变化情况;所述修改模块,用于根据被测载体的机动变化情况调整卡尔曼滤波器的滤波增益矩阵数值和观测噪声方差矩阵的数值,并将调整后的值反馈给迭代计算模块。2.根据权利要求1所述的一种汽车夜间行驶导航定位系统,其特征在于,所述传感器模块包括角速度传感器、加速度传感器,其中:所述角速度传感器,用于获取车辆角速度的量测信息;所述加速度传感器,用于获取车辆速度的量测信息。3.根据权利要求2所述的一种汽车夜间行驶导航定位系统,其特征在于,所述角速度传感器为三轴陀螺仪,所述加速度传感器采用三轴加速度传感器。4.根据权利要求3所述的一种汽车夜间行驶导航定位系统,其特征在于,所述三轴陀螺仪是通过测量三维坐标系内陀螺转子的垂直轴与载体之间的夹角,并计算角速度,通过夹角和角速度来判别物体在三维空间的运动状态,同时测定上、下、左、右、前、后六个方向,最终可判断出载体的移动轨迹和加速度。5.根据权利要求3所述的一种汽车夜间行驶导航定位系统,其特征在于,所述三轴加速度传感器是感知任意方向上加速度,通过测量载体在某个轴向的受力情况,计算出轴向的加速度大小和方向。6.根据权利要求1所述的一种汽车夜间行驶导航定位系统,其特征在于,所述处理器设置dp1.2、pciem.2、type-c、usb3.0数据传输和显示接口,且pciem.2为bkey,用于高速wi-fi和ssd存储设备扩展,并支持九类扩展接口。7.根据权利要求1所述的一种汽车夜间行驶导航定位系统,其特征在于,还包括存储模块、车载显示屏和喇叭,所述存储模块、车载显示屏、喇叭均与处理器电连;所述存储模块,用于保存导航引擎、地图数据以及gps模块计算出的实时位置;所述车载显示屏,用于显示车辆的当前位置、当前行驶速度、当前时间、离目的地的距离以及需要的时间;所述喇叭,用于对车辆的行进方向进行提示。8.根据权利要求1所述的一种汽车夜间行驶导航定位系统,其特征在于,还包括9v-36v的车载直流电源,所述车载直流电源与处理器电连。
技术总结
本发明公开了一种汽车夜间行驶导航定位系统,属于导航领域。一种汽车夜间行驶导航定位系统,包括GPS模块、传感器模块、滤波处理模块和处理器;本发明通过基于角速度传感器和加速度传感器工作过程无需卫星定位,所以处理器能够依据角速度传感器获取车辆的角速度变化量,得到车辆的运行方向,和加速度传感器获取车辆的速度变化量,得到车辆行进的距离,即可实现该系统在无需卫星定位的情况下,仍可以实现对车辆的精准实时导航定位,同时当GPS模块在接收到4颗以上GPS卫星的卫星信号时,GPS模块可与角速度传感器和加速度传感器组成的传感器模块同时配合使用,进一步提高该汽车用导航系统对车辆定位的精确度。航系统对车辆定位的精确度。航系统对车辆定位的精确度。
技术研发人员:秦智敏
受保护的技术使用者:深圳市诚王创硕科技有限公司
技术研发日:2022.10.18
技术公布日:2022/11/15
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。