1.本发明属于昆虫雷达技术领域,具体涉及基于极化相位特性的昆虫朝向估计方法。
背景技术:
2.季节性迁徙行为广泛存在于水生、陆地、空中动物。然而,“迁徙动物如何知道它们要去哪”仍然是科学未解之谜。为研究动物的导航机理,需对迁徙动物进行有效监测。在迁徙的动物中,迁飞昆虫体型小、飞行高度高、且通常在夜间迁飞,这使得迁飞昆虫监测难以监测。昆虫雷达的出现使得迁飞昆虫监测成为可行,其对昆虫朝向的测量能力,使得昆虫迁飞朝向策略的研究成为了可能。
3.昆虫雷达已经历了三代的发展,包括扫描昆虫雷达、垂直昆虫雷达、全极化昆虫雷达。最早的昆虫雷达为扫描雷达,基于昆虫身体侧面雷达散射截面积(rcs,radar cross-section)大于头尾面的散射特性,对于存在共同定向的迁飞昆虫群,扫描昆虫雷达测量的回波p显表现为“哑铃”形状,与哑铃垂直的方向即为昆虫共同定向方向,因而,扫描昆虫雷达可测量迁飞虫群的共同定向。第二代昆虫雷达为垂直雷达,通过波束垂直对天、高速旋转线极化的波束测量昆虫腹部在360
°
极化方向的rcs。基于昆虫最大rcs出现在极化方向平行于体轴时的假设,垂直昆虫雷达可测量个体昆虫的头部朝向。然而,该假设仅对小昆虫有效,对部分大昆虫,存在昆虫最大rcs出现在极化方向垂直于体轴时的情况,此时提取的头部朝向会存在90
°
错误。前两代昆虫雷达均为非相参雷达,无法测量目标完整的回波相位。第三代昆虫雷达为全极化昆虫雷达,该型雷达为全极化、高分辨、相参体制,能直接测量个体昆虫的极化散射矩阵(psm,polarization scattering matrix),获取目标的回波相位信息。更多维的信息获取能力,为全极化雷达辨别90
°
朝向错误、提升朝向测量精度提供了可能。
技术实现要素:
4.有鉴于此,本发明提供了基于极化相位特性的昆虫朝向估计方法,可以解决测量昆虫朝向时的90
°
朝向错误问题,并提高朝向测量精度。这有助于提高昆虫雷达的观测能力,促进昆虫迁飞行为的研究。
5.为达到上述目的,本发明的技术方案为:1、基于极化相位特性的昆虫朝向估计方法,其特征在于,包括如下步骤:
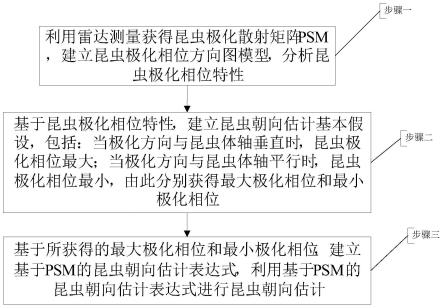
6.步骤一、利用雷达测量获得昆虫极化散射矩阵psm,建立昆虫极化相位方向图模型,分析昆虫极化相位特性;
7.步骤二、基于昆虫极化相位特性,建立昆虫朝向估计基本假设,包括:当极化方向与昆虫体轴垂直时,昆虫极化相位最大;当极化方向与昆虫体轴平行时,昆虫极化相位最小,由此分别获得最大极化相位和最小极化相位;
8.步骤三、基于所获得的最大极化相位和最小极化相位,建立基于psm的昆虫朝向估
计表达式,利用基于psm的昆虫朝向估计表达式进行昆虫朝向估计。
9.进一步地,步骤一中昆虫极化相位方向图模型为:
[0010][0011]
其中,φ(α)表示在α方向下的相位值,α表示极化方向,s
11
、s
12
、s
21
和s
22
分别为psm中hh、hv、vh和vv极化通道的幅度,β、β
′
、γ分别为psm中hv、vh和vv极化通道的相位,h表示水平极化,v表示垂直极化,hv表示发射极化方式为v,接收极化方式为h;vh表示发射极化方式为h,接收极化方式为v;vv表示发射极化方式为v,接收极化方式为v;a和b均为指代参数分别用于指代如下内容:
[0012][0013]
进一步地,步骤三中,昆虫朝向估计表达式为:
[0014][0015]
其中,为昆虫朝向,θ表示为:
[0016][0017]
c0、c1和c2均为指代参数,分别用于指代如下内容:
[0018][0019]
本发明具有如下有益效果:
[0020]
本发明是基于极化相位特性的昆虫朝向估计方法,为测量昆虫朝向提供了一种有效的手段。本发明首先基于微波暗室实测的昆虫psm研究了昆虫极化相位特性,发现了昆虫朝向与极化相位的对应关系,即极化相位最大值总是出现在极化方向与昆虫体轴垂直时,而极化相位最小值总是出现在极化方向与昆虫体轴平行时,且对所有体型昆虫均成立;然后基于新发现的极化相位特性,提出了一种新的昆虫朝向估计方法。该方法估计的昆虫朝向理论上不存在90
°
错误,且低信噪比下估计精度更高。
附图说明
[0021]
图1为本发明提供的基于极化相位特性的昆虫朝向估计方法流程图;
[0022]
图2a为朝向为0
°
时,所有昆虫偏移量δ值分布图;图2b为朝向为30
°
时,所有昆虫偏移量δ值分布图;图2c为朝向为90
°
时,所有昆虫偏移量δ值分布图;
[0023]
图2d为朝向为140
°
时,所有昆虫偏移量δ值分布图;
[0024]
图3a为不同信噪比下基于现有方法和新方法提取的159只昆虫朝向误差的均值对比,图3b为不同信噪比下基于现有方法和新方法提取的159只昆虫朝向误差的标准差对比。
具体实施方式
[0025]
本发明提供了基于极化相位特性的昆虫朝向估计方法,其基本思想是,首先基于微波暗室实测的昆虫psm研究了昆虫极化相位特性,建立昆虫朝向与极化相位的映射关系;然后基于建立的昆虫朝向与极化相位的映射关系设置朝向提取基本假设;最后,基于昆虫psm建立极化相位模型,推导昆虫朝向估计表达式。
[0026]
下面结合附图并举实施例,对本发明进行详细描述。
[0027]
假设昆虫psm为
[0028][0029]
其中,s
11
、s
12
、s
21
和s
22
分别为hh、hv、vh和vv极化通道的幅度,β、β
′
、γ分别为hv、vh和vv极化通道的相位。对于单基地雷达,s
12
=s
21
、β=β
′
。
[0030]
昆虫在不同极化方向的雷达回波可表示为
[0031][0032]
其中,α表示极化方向。
[0033]
令
[0034][0035]
则
[0036]
e(α)=b ja
ꢀꢀꢀ
(4)
[0037]
昆虫极化相位方向图定义为
[0038][0039]
基于在微波暗室中用全极化雷达测量的159只昆虫的psm,研究了昆虫的极化相位特性,在测量时,0
°
和180
°
极化方向与昆虫朝向平行。由于相差180
°
的两个极化方向与昆虫朝向的关系相同,二者是等价的,因此,极化相位方向图的周期为180
°
。对于所有昆虫,最大相位均出现在与昆虫朝向垂直时(90
°
和270
°
),最小值出现在与昆虫朝向平行时(0
°
和180
°
)。
[0040]
基于该特性,可以提出新的朝向提取假设:当极化方向与昆虫体轴垂直时,昆虫极化相位最大;当当极化方向与昆虫体轴平行时,昆虫极化相位最小。基于该假设,求取极化相位最大或者最小对应的极化方向即可估计昆虫朝向。下面将通过求导数的方式,推导昆虫朝向表达式。
[0041]
由于朝向的180
°
模糊,仅考虑180
°
周期内的极化方向α,则昆虫极化相位方向图可表示为
[0042][0043]
求导得到
[0044][0045]
其中
[0046][0047]
令得到
[0048][0049]
代入式(8)得到
[0050][0051]
其中
[0052][0053][0054]
由式(10)得到
[0055][0056]
由此,得到α的两个解:
[0057][0058][0059]
这两个解中,一个为相位最大值对应的极化方向,另一个为最小值对应的极化方向。根据发现的昆虫极化相位,α1和α2应该相差90
°
。然而,从式(14)和式(15)可以看到,二者之差还多了一项,将多出的这一偏移量δ定义为
[0060][0061]
图2分析了在不同朝向下偏移量δ的分布情况,可以看到当昆虫朝向为0
°
和90
°
时,δ=0
°
;当朝向不为0
°
时,δ为10-14
°
量级,非常小,是可以忽略的。因此,可将式(14)和式(15)简化为
[0062][0063][0064]
显然,相位最大值和最小值均与θ相关。因此,求得θ,即可得到昆虫朝向。因此,根据朝向估计基本假设,可得到朝向表达式:
[0065][0066]
因此,本发明提供了基于极化相位特性的昆虫朝向估计方法,下面将以具体实施例说明实施步骤:
[0067]
为了验证前面的昆虫体轴朝向提取方法,基于微波暗室测量的159只昆虫数据,验证了所提出的昆虫朝向提取方法,并与现有的朝向提取方法(《一种基于极化散射矩阵估计的高精度昆虫体轴朝向提取方法》,专利号:zl201710137290.8;《一种基于特征相位的平行和垂直昆虫辨别方法》,专利号:zl201911203473.0)做了对比。步骤如下:
[0068]
步骤一,设定一系列snr(5db,10db,
……
,30db),以实测的159只昆虫psm为真值,以psm中第一个元素的功率(即)为信号功率,根据设定的snr,分别仿真生成4个复高斯白噪声,加到psm的4个值上。
[0069]
步骤二,分别采用本发明的基于极化相位特性的昆虫朝向估计方法和现有的朝向提取方法(《一种基于极化散射矩阵估计的高精度昆虫体轴朝向提取方法》,专利号:zl201710137290.8;《一种基于特征相位的平行和垂直昆虫辨别方法》,专利号:
zl201911203473.0)估计昆虫朝向,计算朝向误差。
[0070]
步骤三,重复步骤一~步骤二500次,统计两种方法估计朝向的误差均值和标准差。
[0071]
对比结果如图2所示。可以看到,当信噪比低于23db时,新方法的误差远小于现有方法,当信噪比高于23db时,新方法误差略大于现有方法。因此,本发明的基于极化相位特性的昆虫朝向估计方法可实现昆虫朝向估计,且在低信噪比下性能优于现有方法。
[0072]
综上,以上仅为本发明基于159只昆虫数据的实施例而已,并非用于限定本发明的保护范围。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。