1.本发明涉及一种用于由包装材料的管生产包含可倾倒食品的密封包装的包装单元。
2.本发明还涉及一种由包装材料的管生产包含可倾倒食品的密封包装的方法。
背景技术:
3.众所周知,许多液体或可倾倒食品,例如果汁、uht(超高温处理的)牛奶、葡萄酒、番茄酱等,都是以无菌包装材料制成的包装出售的。
4.一个典型的例子是用于液体或可倾倒食品的平行六面体包装,称为利乐砖无菌(tetra brik aseptic,注册商标),它是通过折叠、密封和切割层压包装材料的卷材制成的。特别地,包装材料具有多层结构,其包括基层(例如,纸箱层和/或纸层),基层两面都覆盖有热封塑料材料(例如聚乙烯)层。对于用于长期储存产品(例如uht牛奶)的无菌包装,包装材料还包括阻氧材料层(例如铝箔),其叠放在热封塑料材料层上,并且再由形成最终接触食品的包装内表面的另一热封塑料材料层所覆盖。
5.这种包装通常在全自动包装单元上生产,在该包装单元上由以卷材进给的包装材料形成连续管。包装材料卷材在包装单元中进行灭菌,例如通过使用化学灭菌剂,例如过氧化氢溶液。一旦完成灭菌,就会从包装材料的表面上去除化学灭菌剂,例如通过加热进行蒸发。然后将如此灭菌的卷材保持在封闭的灭菌环境中,并进行折叠和纵向密封以形成管,该管沿竖直行进方向进给。
6.包装材料的管实际上形成了无菌室的延伸部,该管填充有已灭菌或经灭菌加工的食品,被密封并随后沿等间距的横向部分被切割。如此获得枕形包装,它们通过横向密封条(即垂直于管的行进方向延伸)彼此连接。然后,枕形包装在相关横向密封条处彼此分离,并被传送到折叠站,在折叠站处它们被机械折叠以形成相应的成品平行六面体包装。
7.包装单元是已知的,其包括两对在相应的引导件上移动并交替作用在包装材料的管上以沿等间隔的横向部分夹持和密封管的夹爪。
8.夹持在每对夹爪之间的管部分通常由加热装置密封,该加热装置由其中一个夹爪携带并局部熔化夹持在夹爪之间的热封塑料材料层。
9.特别地,在每个横向部分处,沿着彼此略微间隔开的两个横向密封条执行密封操作。
10.超声波或感应加热密封装置也广泛用于局部熔化包装材料。
11.一旦完成密封操作,刀(例如由每对中的一个夹爪携带)被启动并与包装材料的管相互作用,以沿着在相关的横向密封条对之间居中延伸的横向部分的线切割管,以从包装材料的管的底端分离枕形包装。
12.详细地,包装单元包括刀驱动装置,该刀驱动装置被配置为沿分离方向移动每把刀,该分离方向与管的行进方向交叉。
13.详细地,刀驱动装置在静止位置和操作位置之间移动,在该静止位置处刀与管间
隔开,在该操作位置处刀在上述横向部分之一处切割管。
14.更详细地说,刀的整个切割刃沿着交叉于行进方向和分离方向延伸的相应横向部分的整个长度同时与管相互作用。
15.相同类型的刀也用于包含两个链式或直线电机输送机的包装单元,它们定义了相应的环形路径并包括安装有相应的密封夹爪的链节或独立移动的推车。
16.两条路径具有相应的直线分支,它们基本上彼此面对并平行,并且包装材料的管在这些分支之间进给,使得一个输送机上的夹爪沿着所述分支与另一输送机上的相应夹爪协作,以在多个连续的等间隔横向部分处夹持管,并密封和分离包装。
17.尽管在功能上是有效的,但上述类型的包装单元仍有待进一步改进。
18.特别地,由于夹持在每对夹爪之间的管部分是熔化的,每把刀都与局部柔软且几乎不坚硬的包装材料相互作用,分离操作可能很困难。
19.此外,由于经加热的包装材料的机械性能,分离是通过对密封的横向部分施加高分离力来实现的。
20.因此,刀会受到一定的磨损。
21.此外,已知包装单元的刀可能倾向于被卡在操作位置,因为经加热的包装材料容易粘住。
22.结果,在某些情况下,刀朝向相关静止位置的返回运动可能会受到阻碍。
23.鉴于此,在该领域内需要一种包括优化地刀的包装单元,该刀可用于有效地将包装与包装材料的管分离并具有更长的使用寿命。
技术实现要素:
24.本发明的一个目的是提供一种允许以简单且经济的方式满足上述需要的包装单元。
25.该目的通过如权利要求1所述的包装单元实现。
26.该目的还通过如权利要求9所述的用于由包装材料的管生产包含可倾倒食品的密封包装的方法来实现。
附图说明
27.将参考附图以示例的方式描述本发明的一个优选的、非限制性的实施方案,其中:
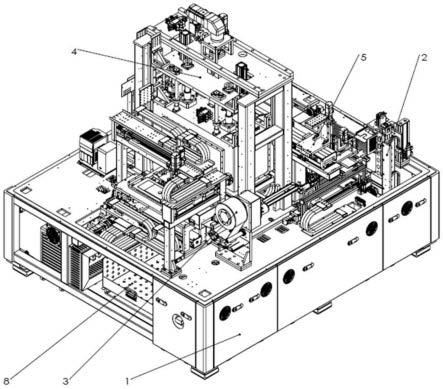
[0028]-图1是根据本发明用于从的包装材料的管生产包含可倾倒食品的密封包装的包装单元的前视图,并且为清楚起见去除了部分;
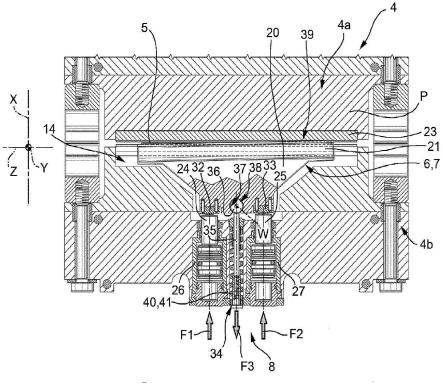
[0029]-图2至图5是沿图1的线ii-ii的截面图,示出了在切割运动的各个顺序步骤中图1的包装单元的一对夹爪和相关的刀;
[0030]-图6是沿图2的vi-vi线的放大截面图;
[0031]-图6a是沿图6的via-via线的放大截面图;
[0032]-图7是沿图2的vii-vii线的放大截面图;
[0033]-图7a是沿图7中viia-viia线的放大截面图;
[0034]-图8和图9是图1的包装单元分别对应于图2和图5的两个操作步骤的的放大局部侧视图,其中一对夹爪和相关的刀被部分剖开;
[0035]-图10至13是分别对应于图2至5的切割运动的连续操作步骤中管的一部分的示意性放大前视图。
具体实施方式
[0036]
图1中的数字1作为整体表示根据本发明的包装单元的示例,该包装单元用于从沿着方向y进给并连续填充有可倾倒食品的包装材料的管3生产包含可倾倒食品的密封包装2。在一个实施方案中,方向y是竖直的。
[0037]
包装单元1包括:
[0038]-结构10,其具有平行于方向y延伸的两个引导件11;
[0039]-两对夹爪4,其可滑动地安装在相应的引导件11上并且被配置为沿着间隔开的横向部分5夹持管3,横向部分5限定与方向y交叉,特别是与方向y正交的相应方向z;
[0040]-密封装置9,其被配置为密封横向部分5,以形成密封包装2;和
[0041]-分离装置6,其用于沿横向部分5将包装2与管3分离。
[0042]
更具体地,对于每对夹爪4,分离装置6包括一个刀7,该刀7沿方向x被可移动地支撑,方向x与方向y和z交叉,特别是与方向y和z正交。
[0043]
包装单元1还包括驱动装置8,驱动装置8被配置为沿与方向y交叉(特别是正交)的平面p,并且在操作位置o和静止位置r之间,相对于相关对夹爪4移动每个刀7。
[0044]
在静止位置r,刀7的切割刃21沿方向x与管3间隔开,并与由待切割的横向部分5限定的方向z对齐,而在操作位置o,刀7已在相应的横向部分5处完全切割管3。
[0045]
在本说明书的以下描述中,为了简单起见,将参考单对夹爪4和相关的刀7,两对夹爪4彼此相同。
[0046]
详细地说,单对夹爪4包括密封夹爪4a和对应的反夹爪4b,它们沿方向x位于管3的相对两侧(图8和图9),并且可以交叉于方向y在打开位置和关闭位置之间移动,其中它们夹持并密封管3。
[0047]
此外,密封装置9包括分别位于密封夹爪4a和反夹爪4b上的密封装置12和压力垫13(图8和图9)。
[0048]
详细地说,密封装置12与压力垫13配合并局部加热被夹在夹爪4a、4b之间的包装材料层。
[0049]
密封装置12可以是超声波密封装置或加热密封装置(例如电感应型)。
[0050]
详细地,如图10至13所示,密封装置9在两个相应的横向密封条5a、5b处密封每个横向部分5,横向密封条5a、5b沿方向y彼此略微间隔开并且平行于相应的方向z延伸。
[0051]
此外,反夹爪4b承载刀7,并且密封夹爪4a包括块23,刀7在操作位置o抵靠在块23上(图5和9)。
[0052]
详细地说,反夹爪4b形成有凹部14,用于以沿方向x滑动的方式容纳刀7(图2至图5、图8和图9)。
[0053]
如图2至图5、图8和图9所示,刀7包括主体20和设置在主体20面向密封夹爪4a的一侧的切割刃21。
[0054]
切割刃21在平面p中具有矩形形状并且优选地沿方向z具有比横向部分5的延伸l2稍大的延伸l1(图2至图5)。
[0055]
当刀7处于静止位置r时,切割刃21完全容纳在凹部14内(图2和8)。
[0056]
当刀7处于操作位置o时,切割刃21平行于相应的方向z,沿方向x从凹部14突出并抵靠密封夹爪4a的块23(图5和图9)。
[0057]
另外,刀7的切割运动是刀7从静止位置r移动到操作位置o的运动,而刀7的返回运动是刀7从操作位置o移动到静止位置r的运动。
[0058]
此外,驱动装置8包括两个液压活塞24、25,它们在平行于方向x的相应气缸26、27中滑动。
[0059]
在所示实施方案中,液压活塞24、25和相应的气缸26、27彼此相等。
[0060]
如图2至图5所示,活塞24、25平行于方向z彼此间隔开,并沿方向x布置在刀7的与切割刃21相反的一侧。
[0061]
此外,反夹爪4b包括导管28a、28b,用于向相应的气缸26、27供给加压流体70,优选为油(图6、6a、7和7a)。
[0062]
详细地,导管28a、28b由未示出的共用管道供应,该共用管道使气缸26、27两者与已知且未示出的液压供应系统流体连通。
[0063]
对于每个气缸26、27,导管28a、28b包括:
[0064]-相应的入口导管50a、50b(在图6和7中仅部分地画出),它们使相关的气缸26、27与共用管道流体连通;
[0065]-具有相关的吹扫出口30a、30b的相应的吹扫导管29a、29b,它们由相应的螺纹盖31a、31b封闭(图6和7);和
[0066]-相应的气缸供应导管51a、51b,其将每个入口导管50a、50b和每个吹扫导管29a、29b与相关的气缸26、27流体连接。
[0067]
在所示的实施方案中,相应的气缸26、27的导管28a、28b彼此相等。
[0068]
在刀7的切割运动期间,活塞24、25以相应的力f1、f2推动刀7,力f1、f2平行于方向x并且取决于相应气缸供应导管51a、51b处的流体70的压力。
[0069]
此外,由于气缸26和27由未示出的共用入口管道供给,因此在刀7的切割运动期间,在布置在相应的吹扫导管29a、29b的上游的入口导管50a、50b的截面a处测量的流体70的压力pa对于气缸26和27是相等的(图6和7)。
[0070]
有利地,驱动装置8被配置为当其将刀7从静止位置r移向操作位置o时,相对于待切割的横向部分5的方向z倾斜地移动切割刃21(图2至5)。
[0071]
此外,切割刃21沿着平行于相应方向z的切割表面39接触相应的横向部分5,并且随着刀7从静止位置r向操作位置o移动而逐渐增大(图3至5、11至13)。
[0072]
特别地,由驱动装置8赋予刀7从静止位置r朝向操作位置o的运动包括沿方向x的平移分量和围绕平行于方向y的轴线w的旋转分量(图2至5)。
[0073]
在所示实施方案中,切割表面39在相关的一对横向密封条5a、5b之间居中延伸(图11至13)。
[0074]
此外,当刀7处于操作位置o时,切割表面39对应于相应横向部分5的整个长度l2(图5和13)。
[0075]
图10至图13中所示的切割表面39和横向部分5的尺寸和比例必须旨于纯粹的指示性的而非限制性的。
[0076]
在下文中,
″
倾斜
″
一词用于表示不平行于方向z但平行于平面p的运动。
[0077]
详细地,导管28a具有限流器60,其使导管28a的至少一部分的横截面变窄,从而限定流体70的局部压降δp。
[0078]
在所示实施方案中,限流器60使气缸供应导管51a和吹扫导管29a的横截面变窄(参见图6a的详细横截面)。
[0079]
相反,导管28b是自由的并且没有限制气缸供应导管51b和吹扫导管29b的横截面的主体(参见图7a的详细横截面)。
[0080]
结果,在布置在限流器60下游的气缸供应导管51a的截面b(图6)处测量的流体70的压力pb低于在气缸供应导管51b的截面c(图7)处测量的流体70的压力pc。
[0081]
因此,由活塞24施加的力f1的强度低于由活塞25施加的力f2的强度。
[0082]
在所示实施方案中,限流器60是与螺纹盖31a同轴且与螺纹盖31a成一体的圆柱形主体(图6)。
[0083]
详细地说,限流器60的直径d1小于气缸供应导管51a的直径d2(图6a)。
[0084]
参考图2至图5,反夹爪4b还包括沿方向z置于活塞24和25之间的连杆34(图2至图5),其将刀7连接到反夹爪4b本身并平行于方向x延伸。
[0085]
特别地,连杆34又包括平行于方向x延伸的伸长元件35;和沿方向x布置在伸长元件35的靠近切割刃21的一端处的圆形元件36。
[0086]
详细地,伸长元件35延伸穿过反夹爪4b,而圆形元件36布置在刀7的相应凹部37中(图2至5)。
[0087]
连杆34可与刀7一体地沿方向x滑动。
[0088]
圆形元件36和凹部37限定刀7到反夹爪4b的铰链38。
[0089]
结果,刀7可相对于铰链38绕轴线w旋转。
[0090]
此外,活塞24、25和相关的气缸26、27平行于方向z布置在铰链38的相对侧上(图2至5)。
[0091]
此外,反夹爪4b包括弹性装置40,其将刀7推向静止位置r。
[0092]
在所示实施方案中,弹性装置40包括沿方向x缠绕在伸长元件35周围的螺旋弹簧41。
[0093]
详细地说,弹簧41在刀7上施加弹力f3,弹力f3平行于方向x并且自密封夹爪4a朝向反夹爪4b(图2至5)。换言之,弹力f3与力f1和f2相反。
[0094]
此外,在刀7从操作位置o到静止位置r的返回运动期间,限流器60也起作用,以使切割刃21在弹性装置40的作用下相对于已切割的横向部分5的方向z倾斜。
[0095]
此外,反夹爪4b包括两个块32、33,它们固定到刀7并且可与刀7一体地移动(图2至图5)。
[0096]
在所示的实施方案中,块32、33接合主体20的在刀7的与切割刃21相对的一侧上的相应凹部。
[0097]
每个块32、33沿方向x插入刀7和相应的活塞24、25之间。
[0098]
优选地,活塞24和25在刀7的整个操作过程中与相应的块32和33接触(图2至5)。结果,活塞24和25通过相应的块32和33不断地与刀7间接接触。
[0099]
块32和33将由相应的活塞24和25施加的力f1和f2传递到刀7。
[0100]
参考图2至5,块32和33沿方向z布置在圆形元件36的相应相对侧(图2至5)。
[0101]
现在将从这样一种情况开始描述包装单元1的操作:其中一对夹爪4沿方向y定位在管3的刚刚密封的横向部分5处并且刀7处于静止位置r(图2和8)。
[0102]
为了开始刀7朝向操作位置o的切割运动,流体70通过相应的入口导管50a、50b被供应到气缸26和27。
[0103]
详细地,由于限流器60,从入口导管50a流向气缸供应导管51a的流体70经受局部压降δp(图6和6a)。
[0104]
相反,从入口导管50b流向气缸供应导管51b的流体70不会经历局部压降δp,因为导管28b是自由的并且没有限制气缸供应导管51b的横向部分的主体(图7和7a)。
[0105]
结果,在截面b测量的流体70的压力pb(图6)低于在截面c测量的流体70的压力pc(图7)。
[0106]
因此,在刀7的切割运动期间,由活塞24施加的力f1的强度低于由活塞25施加的力f2的强度。
[0107]
由于力f1和f2两者都平行于方向x,刀7和连杆34沿方向x滑动。
[0108]
此外,由于力f1的强度低于力f2的强度,当刀7沿方向x滑动时,刀7绕着平行于平面p的铰链38旋转,并且切割刃21相对于相应的方向z倾斜。
[0109]
参考图2至图5,在切割运动期间,刀7围绕铰链38逆时针旋转。
[0110]
当活塞24和25在其相应的冲程内移动时,刀7向操作位置o移动,并且切割刃21相对于相应的方向z保持倾斜。
[0111]
切割刃21沿平行于相应方向z的切割表面39接触横向部分5,随着刀7从静止位置r向操作位置o移动而逐渐增大(图3至5和图11至13)。
[0112]
详细地,切割表面39在相关的成对横向密封条5a、5b之间居中延伸(图10至13)。
[0113]
在这个阶段,当刀7处于操作位置o时,切割表面39对应于横向部分5的整个长度l2,并且切割刃21抵靠密封夹爪4a的块23(图5和13)。
[0114]
一旦刀7已经到达操作位置o,切割运动完成,并且从管3分离出一个密封包装2(图1)。
[0115]
此外,没有更多的流体70被送入气缸26、27,并且弹簧41通过经由连杆34施加力f3而使刀7从操作位置o返回并向静止位置r移动。
[0116]
由于限流器60仍然布置在气缸供应导管51a内,流体70以与流体70流出气缸27的速度不同的速度流出气缸26。
[0117]
因此,活塞24沿着方向x滑动,比活塞25更慢地远离密封夹爪4a。
[0118]
结果,在刀7的返回运动期间,切割刃21相对于相应的方向z倾斜地移动。
[0119]
根据本发明的包装单元1的优点将从以上描述中清楚可知。
[0120]
特别地,由于在刀7的切割运动期间刀7的切割刃21相对于相应的方向z倾斜地移动并且沿着逐渐增大的切割表面39接触横向部分5,所以刀7有效地切割横向部分5本身。
[0121]
事实上,已经观察到,切割刃21接触横向部分5的特定方式允许对局部熔化的包装材料进行精确切割。
[0122]
结果,刀7不仅在横向部分5处撕裂管3,而且锐利地切割它,从而限制了切割毛刺和其他切割缺陷的发展。
[0123]
此外,已经观察到,由于在切割运动期间所要求保护的切割刃21的布置,即使相比于在气缸供应导管51a中没有限流器60的包装单元1中使用的压力而降低入口导管50a、50b处(例如在截面a处)的流体70的压力,也能实现对横向部分5的精确和有效切割。
[0124]
因此,可以减小作用在刀7上的力f1、f2并且可以限制刀7的磨损。
[0125]
此外,已经观察到,由于在刀7的返回运动期间切割刃21也相对于相应方向z倾斜移动,因此与在本说明书的介绍部分中所讨论的已知包装单元相比,刀7卡在加热的包装材料中的风险显着降低。
[0126]
此外,由于反夹爪4b包括块32、33,活塞24、25不直接与刀7接触。
[0127]
因此,可以有利地限制由力f1、f2引起的刀7的磨损。
[0128]
此外,一旦磨损,块32、33可以被方便地更换,从而有助于延长刀7的使用寿命。
[0129]
此外,由于可以使用具有各自不同直径d1的各种限流器60,因此可以有利地根据需要调节局部压降δp。
[0130]
此外,由于限流器60与吹扫导管29a的螺纹盖31a是一体的,并且现有的包装单元通常设置有用于驱动装置8的维护操作的吹扫导管,现有的包装单元可以容易地通过简单地对螺纹盖31a进行一些修改来改造。
[0131]
最后,显然可以对根据本发明的包装单元1进行不脱离权利要求的保护范围的修改和变型。
[0132]
特别地,活塞24、25和相应的气缸26、27可以彼此不同。
[0133]
此外,限流器60可以布置在气缸供应导管51b内而不是气缸供应导管51a内。
[0134]
此外,驱动装置8可以包括多于两个的活塞24、25和相应的气缸26、27。
[0135]
刀7可以由密封夹爪4a而不是反夹爪4b承载。
[0136]
每对夹爪4可以包括多于一个的刀7,并且每个刀7可以包括多于一个的切割刃21。
[0137]
密封装置12和反密封装置14可以分别位于反夹爪4b和密封夹爪4a上。
[0138]
包装单元1可以包括多于两对的夹爪4。
[0139]
此外,夹爪4可以由彼此相邻地横向布置的相应链式输送机的链节承载,从而允许在输送机本身之间供给包装材料的管3。
[0140]
最后,夹爪4可以由直线电机输送机的相应推车承载,该直线电机输送机也彼此相邻地横向布置,以允许在输送机本身之间供给包装材料的管3。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。