1.本发明属于舰载武器装备保障技术领域,涉及一种基于安全调运走廊的航母舰载机甲板滑行轨迹规划方法。
背景技术:
2.传统航母舰载机甲板调运路径规划依赖于人工方法。当舰面环境复杂时,人工规划难以保证规划的效率与安全性。近年来,基于最优控制的调运轨迹规划方法引发了广泛的关注,然而真实舰面环境上具有众多的障碍,且每个障碍可能具有复杂的形状。因此,传统一对一的障碍描述方法,一方面难以实现避障约束的高效描述,另一方面在障碍数目较大时难以进行可靠的求解。为此,必须提出面向甲板调运轨迹规划的高效能最优控制描述与求解框架,以适应日益复杂的舰面调运需求。
技术实现要素:
3.为了解决上述技术问题,本发明提出了一种基于安全调运走廊的航母舰载机甲板滑行轨迹规划方法。在所提出的方法中,采用了一种三阶段的复合型规划策略。首先使用混合a*算法生成一条粗糙的调运路径,该路径满足简单的运动学约束,能够提供高质量的调运轨迹拓扑。然后,对得到的粗糙轨迹进行重采样,并据此生成安全调运走廊。利用安全调运走廊实现对避障约束的保守、高效近似,实现复杂甲板环境下不依赖于障碍数目的最优控制问题列式。通过求解该问题,得到满足运动方程与避障条件的滑行轨迹。
4.为了达到上述目的,本发明采用的技术方案为:
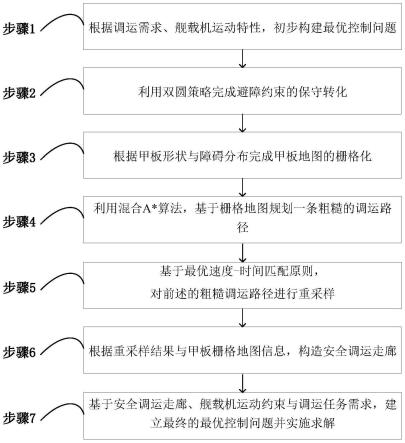
5.一种基于安全调运走廊的航母舰载机甲板滑行轨迹规划方法,第一,根据调运需求、舰载机运动特性,初步构建最优控制问题;第二,利用双圆策略完成避障约束的保守转化;第三,根据甲板形状与障碍分布完成甲板地图的栅格化;第四,利用混合a*算法,基于栅格地图规划一条粗糙的调运路径;第五,基于最优速度-时间匹配原则,对前述的粗糙调运路径进行重采样;第六,根据重采样结果与甲板栅格地图信息,构造安全调运走廊;第七,基于安全调运走廊、舰载机运动约束与调运任务需求,建立最终的最优控制问题并实施求解。
6.包括以下步骤:
7.步骤1:根据调运需求、舰载机运动特性,初步构建最优控制问题
8.步骤1-1:描述舰载机运动学方程
9.舰载机在舰面低速滑行时,其运动可以使用经典的自行车模型描述。记舰载机后轮中心为g(x,y)并且滑行速度为v。舰载机的朝向角与前轮比较分别记作θ和不妨使用一个最小包络矩形代表舰载机的外轮廓(如图2),记矩形宽度为b,长度为l=lr lw lf,其中lr、lw和lf分别为舰载机后轮到矩形后边距离、舰载机前后轮间纵向距离、舰载机前轮到矩形前边距离。系统的输入为u=[a,ω]
t
,其中,a为舰载机加速度,ω为前轮转向角加速度。当选取系统状态空间为时,可以使用如下的微分方程描述:
[0010][0011]
此外,考虑舰载机运动过程中如下的约束条件:
[0012]vmin
≤v≤v
max
ꢀꢀꢀꢀꢀ
(2)
[0013][0014]amin
≤a≤a
max
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(4)
[0015]
ω
min
≤ω≤ω
max
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(5)
[0016]
其中,[(
·
)
min
,(
·
)
max
]代表了变量(
·
)的许用范围。
[0017]
步骤1-2:描述任务需求
[0018]
通过边界条件描述调运任务开始时刻与终端期望时刻舰载机的状态。对于初始时刻t=0,舰载机的构型记作:
[0019][0020]
其中,(xs,ys)表示后轮中心g在初始构型下的位置坐标,θs表示在舰载机在初始构型下的机头朝向。在终端时刻t=tf(tf也是待优化的变量),舰载机的构型记作:
[0021]
cos(θ(tf))=cosθf,sin(θ(tf))=sinθfꢀꢀꢀꢀ
(7)
[0022]
其中,(xf,yf)表示后轮中心g在目标构型下的位置坐标,θf表示在舰载机在目标构型下的机头朝向。
[0023]
步骤1-3:描述避障约束
[0024]
定义函数用于将舰载机的自身状态映射到其特征形状π,记定义函数其中特征形状π应能完全覆盖舰载机机身,则当π不与甲板上任何障碍发生重叠时认为避障成功。假设甲板上有n
obs
个障碍,那么,对于第i个障碍,其特征形状记作ωi。则当π与ωi具有重叠部分时,认为舰载机与第i个障碍发生碰撞。因此,舰载机的避障约束可以写作:
[0025][0026]
其中,代表空集,表示了所有障碍的并集。
[0027]
步骤1-4:建立性能指标
[0028]
调运效率与调运安全性是评价调运路径的两个关键因素。其中,设调运开始的时间为0时刻,则调运效率可以直接通过终端时刻tf反映;在调运安全性方面,尽管其在步骤1-1中已经对部分状态变量和控制变量施加了箱型约束,但提高控制变量与状态变量的顺滑型有利于进一步提高操作稳定性与驾驶员的舒适性。为此,优化问题的性能指标采用如下的形式:
[0029][0030]
其中,p和r分别代表状态量与控制量的权重;tf表示调运完成的时刻。
[0031]
步骤1-5:建立最优控制问题
[0032]
基于前述描述,建立最优控制问题ocp
ori
,其具体形式为:
[0033][0034]
步骤2:利用双圆策略完成避障约束的保守转化
[0035]
针对步骤1-1中提及的最小包络矩形,使用两个分布在其对称轴方向且半径相同的圆,实现对其完整的覆盖(如图3所示)。这两个圆中,靠近舰载机前端的称作前圆,另一个称作后圆,两个圆的半径记作前圆与后圆的圆心分别记作gf(xf,yf)和gr(xr,yr),二者坐标计算如下:
[0036][0037]
甲板上的舰岛、人员及其他装备需视作舰载机滑行过程中的的障碍。根据前述的转化,当保证双圆中的任意一个都不与障碍发生重叠,则认为避障成功。若将双圆缩聚到各自圆心,并对障碍物膨胀rd的尺寸,则避障约束可以进一步转化为圆心gf和gr均不与膨胀后的障碍物发生碰撞。
[0038]
步骤3:根据甲板形状与障碍分布完成甲板地图的栅格化
[0039]
基于步骤2中描述的扩张方式,采用分辨率r
res
建立甲板的栅格地图λ。对于任意栅格,若其与膨胀后的障碍物重叠,则认为其为一个障碍栅格;否则,认为其为一个自由栅格。记x方向与y方向上,栅格地图的边界分别为[x
min
,x
max
]与[y
min
,y
max
]。令“栅格(i,j)”代表如下的二维区域:{(x,y)|(i-1)r
res
<x-x
min
≤ir
res
,(j-1)r
res
<y-y
min
≤jr
res
}。在图4中,展示了栅格地图中的碰撞判定方法。
[0040]
步骤4:利用混合a*算法,基于栅格地图规划一条粗糙的调运路径
[0041]
使用混合a*算法,结合舰载机的运动学约束,为舰载机后轮中心g(x,y)规划一条粗糙路径,根据公式(11)可以计算gf(xf,yf)与gr(xr,yr)相应的路径。由混合a*算法得到的路径,实际上为一系列航路点,将其记作path
ha
。假设path
ha
由n
ha
个航路点组成,记其中第k个航路点为nodek(i=1,2,
…
,n
ha
),其包含了舰载机后轮中心在当前点的位置信息与朝向信息
[0042]
步骤5:基于最优速度-时间匹配原则,对前述的粗糙调运路径进行重采样
[0043]
步骤5-1:调运耗时估计
[0044]
定义路径path
ha
的长度为任意相邻航路点之间距离之和,记作l
ha
。假设在该路径内采用时间最优运动方式。在路径两个端部航路点上速度为0。引入距离阈值则沿path
ha
完成调运的耗时可以估计为t
all
,其计算方法如下:
[0045][0046]
其中,v
max
表示舰载机最大滑行上限;a
max
表示舰载机加速度上限。
[0047]
步骤5-2:在离散点重采样
[0048]
不失一般性,考虑实际求解过程中将时间段离散成nd个等长时间区间,则有(nd 1)个离散点。变量t
all
实际上为问题(10)中的tf提供了初始猜测,则第m(m=0,2,...,nd)个离散点近似对应于时刻tm=fmt
all
=m
×
t
all
/nd。在tm时刻,舰载机的位置、朝向、速度、加速度可以根据path
ha
确定为与特别地,对于舰载机朝向变化序列需利用一修正过程保证其连续性,记修正后的朝向变化序列为接下来,基于运动方程公式(1),联合公式(3)与公式(5)中的约束,确定舰载机前轮转向角与前轮转向角角速度
[0049][0050][0051]
至此,通过重采样过程为实际优化问题提供了初始猜测。具体地,调运时间可以用t
all
进行初始化,在所有离散点上,状态变量与控制变量可以通过七元组进行初始化。将重采样的路径记作path
rs
。
[0052]
步骤6:根据重采样结果与甲板栅格地图信息,构造安全调运走廊
[0053]
根据path
rs
和公式(11)中的位置关系,可以计算点gf的轨迹trajf和点gr的轨迹trajr。点gf的安全调运走廊的构建过程与点gr类似,下面以点gf为例,说明安全调运走廊的构架方法。假设第m个离散点处(m=0,1,
…
,nd),点gf对应的位置记作记所对应的安全调运走廊为stc
f,m
。
[0054]
首先,将stc
f,m
初始化为点本身,其可以看作一个具有零宽度与零高度的矩形。定义探索方向集合δ=[上,左,下,右]。不断地以固定的步长ρ向δ中的每个方向进行探索。定义在前一步迭代过程中扩展得到的安全调运走廊为γ,我们将γ沿方向λ扩展得到一个临时安全调运走廊γ
*
。如果同时满足如下2个条件,则扩展γ
*
有效并令γ=γ
*
,条件为:1)γ
*
不与栅格地图λ中任何障碍栅格发生重叠;2)在方向λ上扩展的长度不超过预定的扩展距离上限σ。当条件1)或条件2)中至少有一个不满足时,将方向λ从δ中删除。持续进行如上的扩展过程,直到探索方向集合变为空集。
[0055]
重复上述流程(nd 1)次,可以对每个构造其对应的安全调运走廊stc
f,m
。如果保持在stc
f,m
内,则可以保证不与甲板上任何障碍发生碰撞。因此,根据公式(11)中点gf与点g的相对位置关系,对于点gf可以实现如下保守的碰撞约束转化:
[0056][0057]
其中,(xm,ym,θm)分别表示优化问题中第m个离散点上舰载机后轮中心的x坐标、y坐标和机头朝向;代表了第m个离散点上前轮点gf所处安全调运走廊的x坐标上下限;代表了第m个离散点上前轮点gf所处安全调运走廊的y坐标上下限。
[0058]
同样地,对于点gr可以类似构造其保守的碰撞约束转化:
[0059][0060]
其中,代表了第m个离散点上前轮点gr所处安全调运走廊的x坐标上下限;代表了第m个离散点上前轮点gr所处安全调运走廊的y坐标上下限。
[0061]
步骤7:基于安全调运走廊、舰载机运动约束与调运任务需求,建立最终的最优控制问题并实施求解
[0062]
使用公式(15)与公式(16)中的转化后的约束条件替代最优控制问题ocp
ori
中的避障条件,构成如下的最优控制问题ocp
rf
:
[0063][0064]
求解最优控制问题ocp
rf
,得到调运轨迹path
rf
。
[0065]
本发明的有益效果为:
[0066]
本发明通过引入安全调运走廊的概念,实现了对复杂避障约束条件的保守转化,最终求解的最优控制问题ocp
rf
中,避障约束的数目与甲板上实际的障碍数目n
obs
无关,仅与求解过程中采用的离散点数目(nd 1)相关,能够极大的简化问题的求解难度,保证舰载机甲板调运路径的高效可靠生成。
附图说明
[0067]
图1为本发明的流程图。
[0068]
图2为本发明中舰载机模型及尺寸示意图。
[0069]
图3为本发明中舰载机的双圆表示示意图。
[0070]
图4为本发明中栅格地图上的碰撞判定示意图。
[0071]
图5为本发明实施例中航母甲板环境示意图。
[0072]
图6为本发明实施例中计算得到的滑行轨迹。
具体实施方式
[0073]
以下结合具体实施例对本发明做进一步说明。
[0074]
考虑某舰载战斗机在某航母甲板的调运轨迹规划问题。舰载机的尺寸参数以及相关算法参数如表1所示,航母甲板的形状尺寸与甲板上的障碍分布如图5所示。考虑舰载机从甲板上一点到弹射器c3的滑行轨迹规划问题,具体边界条件如表2所示。
[0075]
表1舰载机尺寸参数与算法参数
[0076][0077]
表2舰载机初始边界条件与四个不同的终端目标点
[0078] x(m)y(m)朝向角(deg)初始边界条件40.0037.500.00终端边界条件c3210.7240.841.50
[0079]
一种基于安全调运走廊的航母舰载机甲板滑行轨迹规划方法,包括以下步骤:
[0080]
步骤1:根据调运需求、舰载机运动特性,初步构建最优控制问题
[0081]
步骤1-1:描述舰载机运动学方程
[0082]
记舰载机后轮中心为g(x,y)并且滑行速度为v。舰载机的朝向角与前轮比较分别记作θ和不妨使用一个最小包络矩形代表舰载机的外轮廓,记矩形宽度为b=8.6,长度为l=lr lw lf=18.3,其中lr==6.3、lw=8和lf=4分别为舰载机后轮到矩形后边距离、舰载机前后轮间纵向距离、舰载机前轮到矩形前边距离。系统的输入为u=[a,ω]
t
,其中,a为舰载机加速度,ω为前轮转向角加速度。当选取系统状态空间为时,可以使用如下的微分方程描述:
[0083][0084]
此外,考虑舰载机运动过程中如下的约束条件:
[0085]vmin
≤v≤v
max
ꢀꢀꢀꢀꢀꢀꢀ
(19)
[0086]
[0087]amin
≤a≤a
max
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(21)
[0088]
ω
min
≤ω≤ω
max
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(22)
[0089]
其中,v
min
=0,v
max
=2,a
max
=-a
min
=1,ω
max
=-ω
min
=π/3。
[0090]
步骤1-2:描述任务需求
[0091]
通过边界条件描述调运任务开始时刻与终端期望时刻舰载机的状态。对于初始时刻t=0,舰载机的构型记作:
[0092][0093]
其中,(xs,ys)=(40,37.5)表示后轮中心g在初始构型下的位置坐标,θs=0表示在舰载机在初始构型下的机头朝向。在终端时刻t=tf(tf也是待优化的变量),舰载机的构型记作:
[0094]
cos(θ(tf))=cosθf,sin(θ(tf))=sinθfꢀꢀꢀꢀ
(24)
[0095]
其中,(xf,yf)=(210.72,40.84)表示后轮中心g在目标构型下的位置坐标,θf=1.5/180
×
π表示在舰载机在目标构型下的机头朝向。
[0096]
步骤1-3:描述避障约束
[0097]
定义函数用于将舰载机的自身状态映射到其特征形状π,记定义函数其中特征形状π应能完全覆盖舰载机机身,则当π不与甲板上任何障碍发生重叠时认为避障成功。假设甲板上有n
obs
个障碍,那么,对于第i个障碍,其特征形状记作ωi。则当π与ωi具有重叠部分时,认为舰载机与第i个障碍发生碰撞。因此,舰载机的避障约束可以写作:
[0098][0099]
其中,代表空集,表示了所有障碍的并集。
[0100]
步骤1-4:建立性能指标
[0101]
调运效率与调运安全性是评价调运路径的两个关键因素。其中,设调运开始的时间为0时刻,则调运效率可以直接通过终端时刻tf反映;在调运安全性方面,尽管其在步骤1-1中已经对部分状态变量和控制变量施加了箱型约束,但提高控制变量与状态变量的顺滑型有利于进一步提高操作稳定性与驾驶员的舒适性。为此,优化问题的性能指标采用如下的形式:
[0102][0103]
其中,p=diag(0,0,0,0,0)和r=diag(0,0)分别代表状态量与控制量的权重,即考虑时间最优意义下的轨迹规划问题;tf表示调运完成的时刻。
[0104]
步骤1-5:建立最优控制问题
[0105]
基于前述描述,建立最优控制问题ocp
ori
,其具体形式为:
[0106][0107]
步骤2:利用双圆策略完成避障约束的保守转化
[0108]
针对步骤1-1中提及的最小包络矩形,使用两个分布在其对称轴方向且半径相同的圆,实现对其完整的覆盖。这两个圆中,靠近舰载机前端的称作前圆,另一个称作后圆,两个圆的半径记作前圆与后圆的圆心分别记作gf(xf,yf)和gr(xr,yr),二者坐标计算如下:
[0109][0110]
甲板上的舰岛、人员及其他装备需视作舰载机滑行过程中的的障碍。根据前述的转化,当保证双圆中的任意一个都不与障碍发生重叠,则认为避障成功。若将双圆缩聚到各自圆心,并对障碍物膨胀rd的尺寸,则避障约束可以进一步转化为圆心gf和gr均不与膨胀后的障碍物发生碰撞。
[0111]
步骤3:根据甲板形状与障碍分布完成甲板地图的栅格化
[0112]
基于步骤2中描述的扩张方式,采用分辨率r
res
=1建立甲板的栅格地图λ。对于任意栅格,若其与膨胀后的障碍物重叠,则认为其为一个障碍栅格;否则,认为其为一个自由栅格。记x方向与y方向上,栅格地图的边界分别为[x
min
,x
max
]与[y
min
,y
max
]。令“栅格(i,j)”代表如下的二维区域:{(x,y)|(i-1)r
res
<x-x
min
≤ir
res
,(j-1)r
res
<y-y
min
≤jr
res
}。
[0113]
步骤4:利用混合a*算法,基于栅格地图规划一条粗糙的调运路径
[0114]
使用混合a*算法,结合舰载机的运动学约束,为舰载机后轮中心g(x,y)规划一条粗糙路径,根据公式(11)可以计算gf(xf,yf)与gr(xr,yr)相应的路径。由混合a*算法得到的路径,实际上为一系列航路点,将其记作path
ha
。假设path
ha
由n
ha
个航路点组成,记其中第k个航路点为nodek(i=1,2,
…
,n
ha
),其包含了舰载机后轮中心在当前点的位置信息与朝向信息
[0115]
步骤5:基于最优速度-时间匹配原则,对前述的粗糙调运路径进行重采样
[0116]
步骤5-1:调运耗时估计
[0117]
定义路径path
ha
的长度为任意相邻航路点之间距离之和,记作l
ha
。假设在该路径内采用时间最优运动方式。在路径两个端部航路点上速度为0。引入距离阈值则沿path
ha
完成调运的耗时可以估计为t
all
,其计算方法如下:
[0118][0119]
其中,v
max
=2表示舰载机最大滑行上限;a
max
=1表示舰载机加速度上限。
[0120]
步骤5-2:在离散点重采样
[0121]
不失一般性,考虑实际求解过程中将时间段离散成nd=200个等长时间区间,则有(nd 1)=201个离散点。变量t
all
实际上为问题(10)中的tf提供了初始猜测,则第m(m=0,2,...,200)个离散点近似对应于时刻tm=fmt
all
=m
×
t
all
/200。在tm时刻,舰载机的位置、朝向、速度、加速度可以根据path
ha
确定为与特别地,对于舰载机朝向变化序列需利用一修正过程保证其连续性,记修正后的朝向变化序列为接下来,基于运动方程公式(1),联合公式(3)与公式(5)中的约束,确定舰载机前轮转向角与前轮转向角角速度
[0122][0123][0124]
至此,通过重采样过程为实际优化问题提供了初始猜测。具体地,调运时间可以用t
all
进行初始化,在所有离散点上,状态变量与控制变量可以通过七元组进行初始化。将重采样的路径记作path
rs
。
[0125]
步骤6:根据重采样结果与甲板栅格地图信息,构造安全调运走廊
[0126]
根据path
rs
和公式(11)中的位置关系,可以计算点gf的轨迹trajf和点gr的轨迹trajr。点gf的安全调运走廊的构建过程与点gr类似,下面以点gf为例,说明安全调运走廊的构架方法。假设第m个离散点处(m=0,1,
…
,200),点gf对应的位置记作记所对应的安全调运走廊为stc
f,m
。
[0127]
首先,将stc
f,m
初始化为点本身,其可以看作一个具有零宽度与零高度的矩形。定义探索方向集合δ=[上,左,下,右]。不断地以固定的步长ρ向δ中的每个方向进行探索。定义在前一步迭代过程中扩展得到的安全调运走廊为γ,我们将γ沿方向λ扩展得到一个临时安全调运走廊γ
*
。如果同时满足如下2个条件,则扩展γ
*
有效并令γ=γ
*
,条件为:1)γ
*
不与栅格地图λ中任何障碍栅格发生重叠;2)在方向λ上扩展的长度不超过预定的扩展距离上限σ。当条件1)或条件2)中至少有一个不满足时,将方向λ从δ中删除。持续进行如上的扩展过程,直到探索方向集合变为空集。
[0128]
重复上述流程(nd 1)次,可以对每个构造其对应的安全调运走廊stc
f,m
。如果保持在stc
f,m
内,则可以保证不与甲板上任何障碍发生碰撞。因此,根据公式(11)中点gf与点g的相对位置关系,对于点gf可以实现如下保守的碰撞约束转化:
[0129]
[0130]
其中,(xm,ym,θm)分别表示优化问题中第m个离散点上舰载机后轮中心的x坐标、y坐标和机头朝向;代表了第m个离散点上前轮点gf所处安全调运走廊的x坐标上下限;代表了第m个离散点上前轮点gf所处安全调运走廊的y坐标上下限。
[0131]
同样地,对于点gr可以类似构造其保守的碰撞约束转化:
[0132][0133]
其中,代表了第m个离散点上前轮点gr所处安全调运走廊的x坐标上下限;代表了第m个离散点上前轮点gr所处安全调运走廊的y坐标上下限。
[0134]
步骤7:基于安全调运走廊、舰载机运动约束与调运任务需求,建立最终的最优控制问题并实施求解
[0135]
使用公式(15)与公式(16)中的转化后的约束条件替代最优控制问题ocp
ori
中的避障条件,构成如下的最优控制问题ocp
rf
:
[0136][0137]
求解最优控制问题ocp
rf
,得到调运轨迹path
rf
,如图6所示。
[0138]
以上所述实施例仅表达本发明的实施方式,但并不能因此而理解为对本发明专利的范围的限制,应当指出,对于本领域的技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变形和改进,这些均属于本发明的保护范围。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。