一种基于enva天文算法的太阳追踪方法
技术领域
1.本发明涉及一种太阳追踪方法,具体涉及一种基于enva天文算法的太阳追踪方法。
背景技术:
2.太阳跟踪方法按照追踪方式分类主要有传感器追踪和计算太阳运动轨迹追踪方式。传感器追踪方式采用光电传感器检测太阳光与电池板法线的偏离度,实现反馈跟踪。太阳运动轨迹追踪方式是根据太阳的实际运行轨迹按预定的程序调整跟踪装置,这种追踪方式能够全天候实时跟踪,但是晚上光伏面板基本不发电,然而跟踪装置一直在工作,从而导致无用的消耗。
技术实现要素:
3.本发明的目的在于克服上述现有技术的缺点,提供了一种基于enva天文算法的太阳追踪方法,该方法能够避免全天实时跟踪带来的不必要消耗。
4.为达到上述目的,本发明所述的基于enva天文算法的太阳追踪方法包括以下步骤:
5.获取光伏面板所在位置的经纬度信息,根据所在位置的经纬度信息采用enva天文算法判断光伏面板所在位置为白天或者夜晚;
6.当光伏面板所在位置为白天时,则采用光电追踪算法控制光伏面板的倾斜角度,使得阳光垂直照射光伏面板。
7.利用定位系统获取光伏面板所在位置的经纬度信息。
8.定位系统为gps定位系统或者北斗定位系统。
9.所述采用光电追踪算法控制光伏面板的倾斜角度,使得阳光垂直照射光伏面板的具体操作为:
10.采用四象限光敏电阻检测当前太阳的照射角度,再根据当前太阳的照射角度控制光伏面板的倾斜角度,使得阳光垂直照射光伏面板。
11.所述采用光电追踪算法控制光伏面板的倾斜角度,使得阳光垂直照射光伏面板的具体操作为:
12.设计均匀布满足够灵敏的圆形光敏电阻的光敏球体,以光敏球的球心o为原点建立三维直角坐标系,其中,三维直角坐标系中的xy平面平行于光伏面板,记录各光敏电阻中心位置的三维坐标(x,y,z),将光敏球体放置于室外空旷位置,对比分析各光敏电阻的阻值,寻找此时阻值最小7个光敏电阻a、b、c、d、e、f及g;
13.求光敏电阻a的坐标(x1,y1,z1)、光敏电阻b的坐标(x2,y2,z2)、光敏电阻c的坐标(x3,y3,z3)、光敏电阻d的坐标(x4,y4,z4)、光敏电阻e的坐标(x5,y5,z5)、光敏电阻f的坐标(x6,y6,z6)及光敏电阻g的坐标(x7,y7,z7)的平均坐标值q(x0,y0,z0),根据所述平均坐标值q(x0,y0,z0)计算太阳的照射角度,再根据太阳的照射角度调节光伏面板的角度,使得阳光垂
直照射光伏面板。
14.x0=(x
1
x
2
x
3
x4 x
5
x
6
x7)/7。
15.y0=(y
1 y2 y3
y4 y
5 y6
y7)/7。
16.z0=(z
1 z2 z3
z4 z
5 z6
z7)/7
17.本发明具有以下有益效果:
18.本发明所述的基于enva天文算法的太阳追踪方法在具体操作时,采用enea天文算法判断光伏面板所在位置为白天或者夜晚;当光伏面板所在位置为白天时,则采用光电追踪算法控制光伏面板的倾斜角度,以提高光伏发电效率,同时避免全天候实时跟踪带来的不必要的消耗,结构简单,操作方便,实用性极强。
附图说明
19.图1为光敏电阻的分布图;
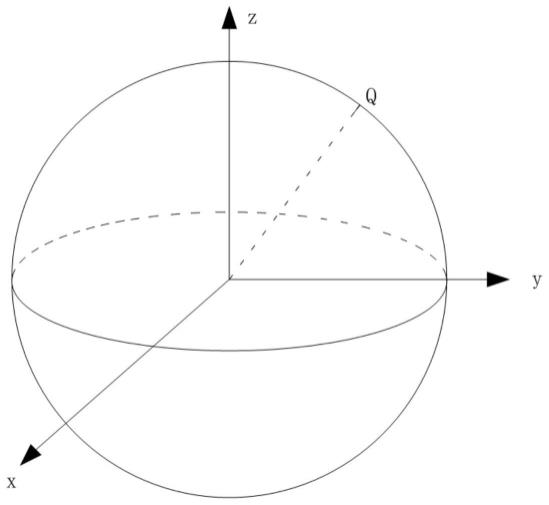
20.图2为本发明建立的三维直角坐标系的示意图;
21.图3为本发明的流程图。
具体实施方式
22.为了使本技术领域的人员更好地理解本发明方案,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分的实施例,不是全部的实施例,而并非要限制本发明公开的范围。此外,在以下说明中,省略了对公知结构和技术的描述,以避免不必要的混淆本发明公开的概念。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都应当属于本发明保护的范围。
23.在附图中示出了根据本发明公开实施例的结构示意图。这些图并非是按比例绘制的,其中为了清楚表达的目的,放大了某些细节,并且可能省略了某些细节。图中所示出的各种区域、层的形状及它们之间的相对大小、位置关系仅是示例性的,实际中可能由于制造公差或技术限制而有所偏差,并且本领域技术人员根据实际所需可以另外设计具有不同形状、大小、相对位置的区域/层。
24.参考图3,本发明所述的基于enva天文算法的太阳追踪方法包括以下步骤:
25.获取光伏面板所在位置的经纬度信息,根据所在位置的经纬度信息采用enva天文算法判断光伏面板所在位置为白天或者夜晚;
26.当光伏面板所在位置为白天时,则采用光电追踪算法控制光伏面板的倾斜角度,使得阳光垂直照射光伏面板。
27.需要说明的是,利用定位系统获取光伏面板所在位置的经纬度信息,所述定位系统可以为gps定位系统或者北斗定位系统,本发明采用高精度enea天文算法的视日追踪算法作为太阳追踪方法的辅助算法,现有众多研究者设计的跟踪系统用到的天文算法多为精度较低的经验公式,通常未考虑月球扰动、章动、地心和地心坐标转换、视差校正、大气折射校正等因素的影响,而enea天文算法在考虑上述因素的基础上大大简化了计算复杂度,且计算最大误差为0.0027
°
,标准偏差为0.001
°
,更适合用于高精度视日跟踪。
28.在实际操作时,只需获取当前地理位置的经纬度信息,读取时间,并以此判断此时
是白天还是夜晚,如果是夜晚,则光伏系统休眠不再运转,如果是白天,则进入视日运动追踪模式,即采用光电追踪算法控制光伏面板的倾斜角度,使得阳光垂直照射光伏面板。
29.另外,所述采用光电追踪算法控制光伏面板的倾斜角度,使得阳光垂直照射光伏面板的具体操作方式有两种:
30.其中,第一种为:采用四象限光敏电阻检测当前太阳的照射角度,再根据当前太阳的照射角度控制光伏面板的倾斜角度,使得阳光垂直照射光伏面板。
31.第二种为:参考图1及图2,设计均匀布满足够灵敏的圆形光敏电阻的光敏球体,以光敏球的球心o为原点建立三维直角坐标系,其中,三维直角坐标系中的xy平面平行于光伏面板,对各光敏电阻进行标号,并记录各光敏电阻中心位置的三维坐标(x,y,z),保证各光敏电阻两端的电压相同,将光敏球体放置于室外空旷位置,对比分析各光敏电阻的阻值,寻找此时阻值最小7个光敏电阻a、b、c、d、e、f及g,其中,光敏电阻a的阻值最小,光敏电阻b、c、d、e、f及g的阻值相同或接近;
32.根据阻值最小的光敏电阻a,确定此时阳光为光敏球体在光敏电阻a处的法线,但是考虑到光敏电阻有一定的面积且在球面上排布,因此本发明求光敏电阻a的坐标(x1,y1,z1)、光敏电阻b的坐标(x2,y2,z2)、光敏电阻c的坐标(x3,y3,z3)、光敏电阻d的坐标(x4,y4,z4)、光敏电阻e的坐标(x5,y5,z5)、光敏电阻f的坐标(x6,y6,z6)及光敏电阻g的坐标(x7,y7,z7)的平均坐标值q(x0,y0,z0),其中,x0=(x
1
x
2
x
3
x4 x
5
x
6
x7)/7,y0=(y
1 y2 y3
y4 y
5 y6
y7)/7,z0=(z
1 z2 z3
z4 z
5 z6
z7)/7,根据所述平均坐标值q(x0,y0,z0)计算太阳的照射角度,再根据太阳的照射角度调节光伏面板的角度,使得阳光垂直照射光伏面板,另外,在实际操作时,每隔预设周期调节一次光伏面板的角度。
33.需要说明的是,本发明采用enea天文算法判断光伏面板所在位置为白天或者夜晚;当光伏面板所在位置为白天时,则采用光电追踪算法控制光伏面板的倾斜角度,避免全天候实时跟踪带来的不必要的消耗。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。