1.本发明属于外骨骼机器人领域,特别涉及一种下肢外骨骼反演控制技术。
背景技术:
2.外骨骼作为可穿戴机器人的一种,通过操作员穿戴形成人机耦合系统,能够有效地协调人体的智慧与机器人的力量从而完成人体难以完成的高强度任务。而下肢外骨骼的主要作用则是辅助人体完成行走、上下楼梯、蹲起等下肢运动,其将外骨骼的腿部与人体的腿部通过连接装置进行连接捆绑,根据人体的实时运动意图并采用外骨骼电机驱动的方式帮助自身行走障碍或丧失行走能力的操作员实现自主行走。此外,根据操作员的不同体型、步态特征和步速,外骨骼可以通过调节控制模式和机械构型的方式来保证人体耦合的适应性和人体的舒适度。在当前的基于模型的下肢外骨骼控制技术中,一般较少考虑关节角速度的不可测性、系统模型不确定性以及外部动态干扰对于外骨骼控制性能的影响,从而影响人机耦合的协调性、柔顺性和安全性。
3.外骨骼主要由以下几个部分组成:(1)机械构型部分。负重增强性外骨骼对于负载质量具有较高要求,因此多采用三关节结构(髋关节、膝关节和踝关节),而康复外骨骼由于多用于病患,需减少关节的活动和患者负担,因此多采用轻量化材质和双关节结构(髋关节和膝关节)。机械结构多采用高强度和抗疲劳材质,如碳纤维、钛合金、高强度纳米材料等;(2)作动系统。外骨骼的作动系统的作用为人体和外骨骼运动提供动力,动力系统多采用高能量密度作动器,如伺服电机系统、电液伺服系统、气动伺服系统等;(3)传感器系统。外骨骼的传感器系统主要用来实时监测人体生理信号、外骨骼运动状态信号、人机耦合信号等,用来判断人体和外骨骼运动状态,如人机耦合力传感器、绝对编码器、肌电传感器等;(4)控制系统。通常利用matlab软件实现所提出的核心控制策略与算法,并采用labview软件实现外骨骼系统的控制程序,并最终将程序加载至硬件控制器中。
技术实现要素:
4.为解决上述技术问题,本发明提出一种线性扩张观测器、反演控制器及外骨骼装置,通过使用基于线性扩张状态观测器的反演控制器实现下肢外骨骼系统的稳定控制。
5.本发明采用的技术方案之一为:一种线性扩张观测器,所述扩张状态观测器根据输入的外骨骼双关节力矩τ以及关节位置q得到估计位置估计速度估计集总不确定性项
6.所述线型扩张观测器设计为:
[0007][0008]
其中,是状态x的估计值,是状态x1的估计值,h是观测器增益,ω0是可调的观测器带宽。
[0009]
本发明采用的技术方案之二为:基于线性扩张状态观测器的反演控制器,所述反
演控制器根据理想输入的位置信息qd、微分得到的理想速度信息以及线性扩张状态观测器输出的估计位置估计速度估计集总不确定性项计算得到外骨骼双关节的驱动力矩τ。
[0010]
基于线性扩张状态观测器的反演控制器设计为:
[0011][0012]
其中,其中,是z2的估计值,z2为系统误差,是状态x2的估计值,β为虚拟控制量,是由参数辨识结果得到的动力学项,是由参数辨识结果得到的动力学项,是参数辨识误差的造成的偏差项,k1为正定矩阵。
[0013]
本发明采用的技术方案之三为:一种外骨骼装置,采用上述的基于线性扩张状态观测器的反演控制器进行电机驱动。
[0014]
本发明的有益效果:本发明设计了一种线性扩张状态观测器,可以根据输入的外骨骼双关节力矩τ以及关节位置q得到估计位置估计速度估计集总不确定性项本发明使用线性扩张状态观测器对未知的集总不确定项以及估计不可测状态进行了观测,降低了其带来的影响;从而用于下肢外骨骼反演控制;本发明还提供一种反演控制器,可以根据理想输入的位置信息qd、微分得到的理想速度信息以及线性扩张状态观测器输出的估计位置估计速度估计集总不确定性项计算得到外骨骼双关节的驱动力矩τ,所述驱动力矩τ用于驱动下肢外骨骼系统动作;本发明使用基于线性扩张状态观测器的反演控制器实现下肢外骨骼系统的稳定控制。
附图说明
[0015]
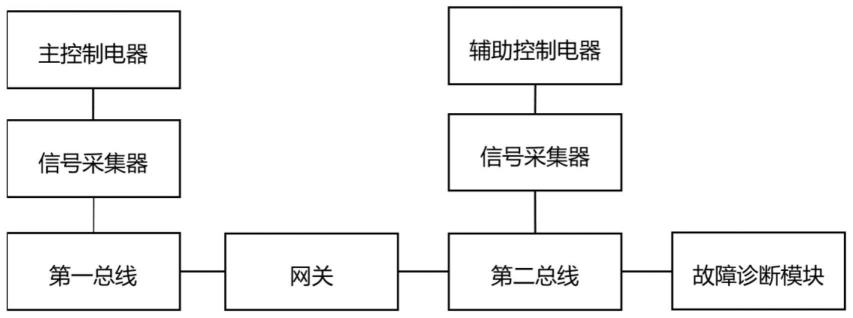
图1为本发明实施例提供的系统框图。
[0016]
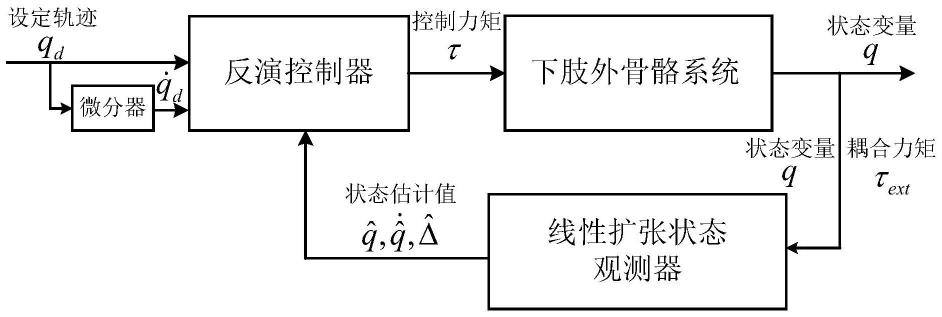
图2为本发明的控制流程图。
具体实施方式
[0017]
为便于本领域技术人员理解本发明的技术内容,下面结合附图1对本发明内容进一步阐释。
[0018]
本发明具体包括以下内容:
[0019]
1、本实施例中以如图1所示的下肢外骨骼系统框图为例进行说明:
[0020]
所述系统框图,主要包括反演控制器、下肢外骨骼系统模块以及扩张状态观测器。如图1中所示;其中反演控制器可以根据理想输入的位置信息qd、微分得到的理想速度信息以及扩张状态观测器输出的估计位置估计速度估计集总不确定性项计算得到外骨骼双关节的驱动力矩τ;下肢外骨骼系统可以根据输入的外骨骼双关节力矩得到实时关节位置q、关节速度下肢外骨骼主要通过传感器获得外骨骼双关节力矩得到实时关节位
置q、关节速度其中扩张状态观测器可以根据输入的外骨骼双关节力矩τ以及关节位置q得到估计位置估计速度估计集总不确定性项在本发明中,分别表示
·
的时间导数,二次时间导数、估计值和估计偏差,这里的符号“·”表示泛指。
[0021]
2、基于线性扩张状态观测器的下肢外骨骼反演控制器的设计
[0022]
21、下肢外骨骼动力学模型建模
[0023]
二自由度下肢外骨骼的动力学模型描述如下
[0024][0025]
其中,q表示外骨骼髋关节位置与膝关节的关节位置的集合向量,表示q的时间导数,表示q的二次时间导数,表示q的二次时间导数,以及分别为系统惯性矩阵、科氏矩阵、重力项、摩擦力项以及集总不确定项。为外骨骼髋关节与膝关节的电机驱动力矩,为人机耦合力矩,表示实数符号,表示二维实数。
[0026]
其中,m(q),g(q)以及可以被表示为
[0027][0028]
其中,m0(q)、g0(q)、是由参数辨识结果得到的动力学项,m
△
(q)、g
△
(q)、是参数辨识误差的造成的偏差项。
[0029]
因此,(1)可以被重写为如下形式
[0030][0031]
其中集总不确定项可以表示为
[0032][0033]
22、线性扩张状态观测器的设计
[0034]
为了解决未测量的关节速度和集总不确定性d(t)的问题,设计一种基于线性扩张状态观测器的反演控制器,以提高相应效果和跟踪精度。
[0035]
外骨骼状态变量可以定义为x1=[q1,q2]
t
,以及扩张状态变量所以(3)的状态空间方程可以表示为
[0036][0037]
其中,δ(t)为x3的时间导数。
[0038]
如果总状态向量可以定义为[x1,x2,x3]
t
,则(5)可以被表示为
[0039]
[0040]
其中,分别表示状态变量x1、x2、x3的时间导数,i2×2表示2乘2的单位矩阵,且
[0041]
u=τ,
[0042][0043][0044][0045]
外骨骼关节位置q以及人机耦合力矩τ
ext
可以通过绝对编码器和三维力传感器测得,但是关节速度无法直接通过绝对编码器获得。因此,线性扩张状态观测器的设计不仅需要估计未测量的系统状态x2,而且需要估计总不确定度x3。
[0046]
根据(7),线性扩张状态观测器可以被设计为如下形式
[0047][0048]
其中,是状态x的估计值,是状态x1的估计值,的估计值,表示针对于状态变量x2的估计偏差,是观测器增益,ω0是可调的观测器带宽。
[0049]
23、反演控制器的设计
[0050]
根据外骨骼动力学模型(6),取x1=[q1,q2]
t
,状态空间表达式为
[0051][0052]
定义系统误差
[0053][0054]
其中,xd为期望轨迹,为虚拟控制量,表示期望轨迹xd的时间导数,为正定矩阵。
[0055]
基于线性扩张状态观测器的反演控制器可以被设计为
[0056]
[0057]
其中,其中,分别表示xd的时间导数和二次时间导数。
[0058]
如图2所示,本发明通过涉及基于线性扩张状态观测器的反演控制器,来得到驱动下肢外骨骼的力矩,从而实现下肢外骨骼系统的稳定控制。
[0059]
本领域的技术人员应注意,本发明的技术方案不仅限于2自由度的下肢外骨骼,对于其他自由度的外骨骼(外骨骼包括上肢外骨骼、下肢外骨骼)也同样适用。
[0060]
本领域的普通技术人员将会意识到,这里所述的实施例是为了帮助读者理解本发明的原理,应被理解为本发明的保护范围并不局限于这样的特别陈述和实施例。对于本领域的技术人员来说,本发明可以有各种更改和变化。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的权利要求范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。