一种自适应位置调节的粒子群光伏mppt控制方法
技术领域
1.本发明涉及光伏系统追踪最大功率点技术领域,具体涉及一种自适应位置调节的粒子群光伏mppt控制方法。
背景技术:
2.太阳能具有安全、环保、资源充足等优点,是一种清洁能源。光伏发电是太阳能利用的一种主要形式。随着光伏发电技术的日益成熟,对发电效率的要求也愈发提高,其中,最大功率点是表征发电效率的一个关键指标。然而,当光照强度发生变化时,将导致光伏阵列输出电压、输出电流发生改变,呈现非线性的输出特性,光伏系统易陷入局部最优状态,严重影响光伏系统对最大功率点的追踪效率,因此,对最大功率点的追踪变得尤为重要。
3.最大功率点追踪的传统方法包括扰动观测法、电导增量法、模糊控制法等。manoharan premkumar、subramaniam umashankar等学者采用直接占空比技术,提出一种变步长扰动观测法,有利于光伏系统的稳态性能;li tongying、zhu hongbo等学者使用自适应占空比,提出一种改进的电导增量法,在追踪最大功率点时响应速度快;dziwinski piotr、bartczuk lukasz等学者结合模糊控制和粒子群算法,提出一种模糊自适应粒子群算法,提高了最大功率点追踪精度;dursun emre hasan、koyuncu hasan等学者通过引入加速度系数,提出一种改进惯性权重的混沌粒子群算法,降低了在最大功率点附近的震荡。上述所提出的mppt算法也能获取mpp,但是不能同时兼顾追踪速度、响应时间、稳态性能的要求。因此,需要研究一种综合性能良好的mppt控制方法。
技术实现要素:
4.本发明的目的在于克服现有技术的不足,提供一种自适应位置调节的粒子群光伏mppt控制方法,能够大幅度提高追踪速度、响应时间、稳态性能。
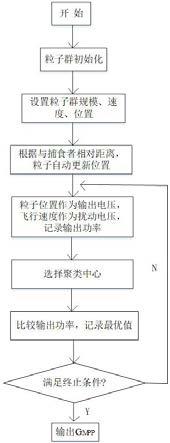
5.本发明解决其技术问题采取的技术方案是:提供一种自适应位置调节的粒子群光伏mppt控制方法,包括以下步骤:步骤(1):采用tent映射产生混沌序列,生成粒子群;步骤(2):设置粒子群规模、速度、位置;步骤(3):以光伏阵列输出电压为参考量,将所有粒子的位置x
t
作为光伏阵列输出电压u
t
,飞行速度v
t
作为对参考电压的扰动,并记录所有粒子的输出功率pi(i=1,2,3
…
n);步骤(4):粒子根据输出功率选择聚类中心p
t
,将粒子群划分为若干个子群,在聚类中心处,给定粒子速度一个趋于0的扰动增量,的数量级为10-3
,动态更新聚类中心,避免光伏系统陷入局部最优状态;步骤(5):粒子在前往聚类中心时,通过调整惯性权重ω的取值,改变粒子群的搜索范围;步骤(6):根据所有粒子的输出功率记录聚类中心p
t
,当达到最大迭代次数后,通过比较所有的聚类中心p
t
,记录最优值g
mpp
。
6.所述步骤(1)中采用tent映射产生混沌序列,生成粒子群,tent映射表达式,随机产生[0,1]内的初值记为y0,代入tent映射表达式进行迭代,当达到最大迭代次数n-1次时,迭代停止,产生混沌序列,yi、y
i 1
分别表示迭代i-1次、i次的映射值。
[0007]
所述步骤(2)中设置粒子群的规模为共有n个粒子,搜索空间为d维,粒子群速度、位置表达式为:,为粒子更新迭代次数;、分别为粒子t-1代、t代时的速度;、为粒子t-1代、t代时的位置;为惯性权重;、为加速因子;、为介于[0,1]之间的随机分布数; pbest为个体最优解,gbest为全局最优解。
[0008]
所述步骤(3)中将粒子群位置替换为输出电压、粒子群速度替换为扰动电压,输出电压表达式为:,、为粒子t-1代、t-2代时的输出电压;为t-1代时的扰动电压。
[0009]
所述步骤(4)中粒子间比较输出功率,选择聚类中心p
t
,将粒子群划分为若干个子群,在聚类中心附近均为,确定聚类中心后,经过每次迭代,均给定粒子速度一个趋于0的扰动增量,的数量级为10-3
,粒子速度更新表达式为,、分别为粒子更新前、后的速度,观察聚类中心pt是否变化,若出现,则将pi确定为新的聚类中心p
t
,通过动态更新聚类中心,避免光伏系统陷入局部最优状态。
[0010]
所述步骤(5)中各个粒子在前往聚类中心时,增加惯性权重的取值,提高粒子对局部最优的搜索能力,当各个聚类中心前往全局最优解时,减小惯性权重的取值,提高聚类中心对全局最优的搜索能力。
[0011]
所述步骤(5)中当光伏系统检测到外界环境发生变化时,在算法中将该种情况认为是捕食者,捕食者为抢夺粒子食物及捕杀粒子的鸟类,设捕食者位置(m1,n1),粒子位置(m2,n2),m1、n1为捕食者位置在坐标轴中的分量;m2、n2为粒子位置在坐标轴中的分量;根据粒子与捕食者的相对距离对粒子位置进行更新,相对距离表达式为;粒子自动更新表达式为;表示为第i(i=1,2,3,
…
n)个粒子在第t代第d(d=1,2,3,
…
,d)维的位置;为(0,1]中的随机数;为一个标准正态分布随机数;为最大迭代次数;为报警值。
[0012]
所述步骤(6)根据输出功率表达式,其中pi表示输出功率,u
t
表示输出电压,i表示输出电流,记录所有粒子的输出功率pi,并记录聚类中心p
t
为最优输出功率,当达到最大迭代次数时,比较所有的最优输出功率p
t
,并记录最优值g
mpp
。
[0013]
采用上述技术方案,本发明与现有技术相比,具有以下优点和积极效果:运用tent映射产生粒子群序列,提高算法的遍历性,降低了光伏系统在最大功率点处的震荡;检测出外界环境对光伏系统的干扰,防止输出电压失真;加入聚类中心,将粒子群分为若干个子群,有利于寻找全局最优解;对粒子速度添加一个趋于0的扰动增量,避免光伏系统陷入局部最优状态。该算法无需选择变量的最优取值,提高了系统的准确性与快速性。本发明在光照强度变化剧烈的条件下有良好的适应能力,可以应用在环境变化剧烈的地区。
附图说明
[0014]
图1是本发明的控制流程图;图2是粒子状态图;图3是现有技术的粒子群mppt在不同光照强度的功率输出曲线;图4是本发明在不同光照强度的功率输出曲线。
具体实施方式
[0015]
以下结合附图对本发明实施方式做进一步详述:运用tent映射产生粒子群序列,提高算法的遍历性,降低了光伏系统在最大功率点处的震荡;检测出外界环境对光伏系统的干扰,防止输出电压失真;加入聚类中心,将粒子群分为若干个子群,有利于寻找全局最优解;对粒子速度添加一个趋于0的增量扰动,避免光伏系统陷入局部最优状态。如图1所示,具体步骤如下:生成粒子群。采用tent映射,在[0,1]区间内随机产生一个y0作为第一个粒子,将其代入tent映射表达式 ,yi、y
i 1
分别表示迭代i-1次、i次的映射值。
[0016]
设置粒子群规模、速度、位置。对tent映射表达式进行n-1次迭代,共有n个粒子,每个粒子的搜索范围为d维,各个粒子的速度、位置随机赋值,表达式为:,为粒子更新迭代次数;、分别为粒子t-1代、t代时的速度;、为粒子t-1代、t代时的位置;为惯性权重;、为加速因子;、为介于[0,1]之间的随机分布数;pbest为个体最优解,gbest为全局最优解。
[0017]
粒子根据与捕食者相对距离,自动更新位置。为了保证粒子群数量的完整性,赋予各个粒子具有反捕食的能力,设捕食者位置(m1,n1),粒子位置(m2,n2),根据粒子与捕食者的相对距离对粒子位置进行更新,相对距离表达式为:,m1、n1为捕食者位置在坐标轴中的分量;m2、n2为粒子位置在坐标轴中的分量。
[0018]
粒子自动更新表达式为;表示为第i(i=1,2,3,
…
n)个粒子在第t代第d(d=1,2,3,
…
,d)维的位置,为(0,1]中的随机数;为一个标准正态分布随机数;为最大迭代次数;为报警值。
[0019]
将粒子群位置替换为输出电压、粒子群速度替换为扰动电压,输出电压表达式为:,、为粒子t-1代、t-2代时的输出电压;为t-1代时的扰动电压。
[0020]
粒子间比较输出功率,选择聚类中心p
t
,将粒子群划分为若干个子群,在聚类中心附近均为,确定聚类中心后,经过每次迭代,均给定粒子速度一个趋于0的扰动增量,的数量级为10-3
,粒子速度更新表达式为,、分别为粒子更新前、后的速度,观察聚类中心pt是否变化,若出现,则将pi确定为新的聚类中心p
t
,通过动态更新聚类中心,避免光伏系统陷入局部最优状态。
[0021]
各个粒子在前往聚类中心时,增加惯性权重的取值,取提高粒子对局部最优的搜索能力,当各个聚类中心前往全局最优解时,减小惯性权重的取值,取,提高聚类中心对全局最优的搜索能力,在聚类中心处,给定粒子速度一个趋于0的扰动增量,的数量级为10-3
,粒子速度更新表达式为,、分别为粒子更新前、后的速度,动态更新聚类中心,避免光伏系统陷入局部最优状态。
[0022]
根据输出功率表达式,其中pi表示输出功率,u
t
表示输出电压,i表示输出电流,记录所有粒子的输出功率pi,并记录聚类中心p
t
为最优输出功率,当达到最大迭代次数时,比较所有的最优输出功率p
t
,并记录最优值g
mpp
。
[0023]
如图2所示,以x1、x2为聚类中心,根据x3与聚类中心的距离,判断粒子的飞行方向,因此可以将数目为n的粒子群分为n/n个子群,距离公式为:,(x1,y1),(x3,y3)分别为粒子x1、x3在坐标轴中的分量。
[0024]
图3和图4为温度在25℃恒定时,光照强度每隔0.2秒变化一次,依次为600w/
㎡
、800w/
㎡
、1000w/
㎡
下传统粒子群算法和本发明的功率输出曲线图,t1、t2、t3分别表示光伏系统在600w/
㎡
、800w/
㎡
、1000w/
㎡
光照强度下达到稳定状态的时间。
[0025]
如图3所示,在0-0.2秒阶段,传统粒子群算法追踪时间为0.12秒,0.2-0.5秒内测试了两种算法在光照强度连续上升条件下的追踪能力。传统粒子群算法的追踪时间分别为0.08秒和0.06秒,可以看出,在光照强度变化的条件下,传统粒子群算法响应速度慢,追踪时间长,增加了功率损失。
[0026]
如图4所示,在0-0.2秒阶段,本发明的算法追踪时间为0.07秒,与传统粒子群算法相比,追踪时间提高了40%,0.2-0.5秒内测试了两种算法在光照强度连续上升条件下的追踪能力。本发明的算法追踪时间约为0.05秒和0.04秒,响应时间更快,在光照强度变化时,算法中加入了反捕食能力和聚类中心,因此,响应速度和追踪精度得到大幅度提升,减少了功率损失。
[0027]
本发明的mppt算法相较于传统的mppt粒子群算法在光照强度变化时具有快速的
适应能力和追踪能力,增加了光伏系统的输出功率,提高了发电量。在0-0.2秒内,使用本发明的mppt算法输出功率比传统的mppt粒子群算法提高了35%。
[0028]
需要强调的是,本发明所述的实施例是说明性的,而不是限定性的,因此本发明包括并不限于具体实施方式中所述的实施例,凡是由本领域技术人员根据本发明的技术方案得出的其他实施方式,同样属于本发明保护的范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。