技术特征:
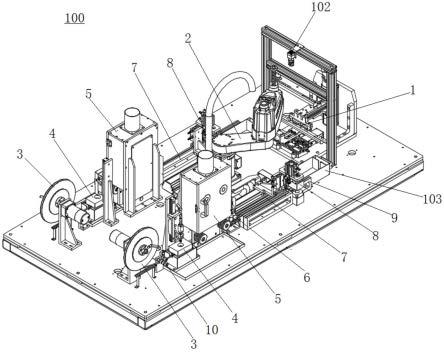
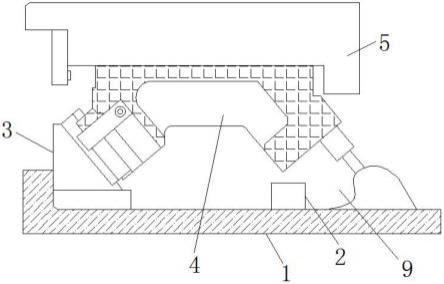
1.一种多规格汇流条端子自动焊接成型设备,其特征在于:其包括至少两条端子加工生产线、设置在所述两条端子加工生产线一端的焊接单元、将所述两条端子加工生产线上的端子搬运到所述焊接单元上或将焊接好的端子从所述焊接单元上搬运下料的机器人搬运机构,所述机器人搬运机构按照设定的汇流条形状将端子摆放在所述焊接单元上。2.如权利要求1所述的多规格汇流条端子自动焊接成型设备,其特征在于:所述端子加工生产线沿料带输送方向依次包括料盘放料单元、沾助焊剂单元、烘干缓存单元、矫直单元、拉料单元以及裁切单元。3.如权利要求2所述的多规格汇流条端子自动焊接成型设备,其特征在于:所述烘干缓存单元包括一箱体、设置在所述箱体内的若干导向滚轮以及设置在所述箱体内对所述箱体内部进行加热的加热件。4.如权利要求2所述的多规格汇流条端子自动焊接成型设备,其特征在于:所述拉料单元包括对端子料带进行初步限位的输送流道、从上下两侧伸入所述输送流道内夹持端子料带的夹料模组、驱动所述夹料模组沿所述输送流道移动的驱动件。5.如权利要求2所述的多规格汇流条端子自动焊接成型设备,其特征在于:所述裁切单元包括第二气缸、受所述第二气缸驱动进行上下运动的上模块、固定在所述上模块上且位于输出侧边缘的上切刀、位于所述上切刀下方且与其配合实现裁切的下切刀。6.如权利要求2所述的多规格汇流条端子自动焊接成型设备,其特征在于:在所述拉料单元与所述裁切单元之间设置有压料单元,所述压料单元包括第三气缸、受所述第三气缸驱动进行上下运动压持端子料带的压料头。7.如权利要求1或2所述的多规格汇流条端子自动焊接成型设备,其特征在于:所述机器人搬运机构包括机械手、设置在所述机械手的活动端的吸附模组,所述吸附模组上设置有至少三组吸嘴模块,其中两组所述吸嘴模块分别用于吸附所述两条端子加工生产线输出的端子,另外一组所述吸嘴模块用于吸附焊接好后的汇流条端子。8.如权利要求1或2所述的多规格汇流条端子自动焊接成型设备,其特征在于:所述焊接单元包括焊台,所述焊台上设置有对端子进行定位的定位基准块、与所述定位基准块配合对端子的水平位置进行限位的水平限位模组,所述定位基准块位置能够调节的安装在所述焊台主体上;所述焊台的上方设置有压持端子的压持模组。9.如权利要求1或2所述的多规格汇流条端子自动焊接成型设备,其特征在于:还包括对焊接区域进行检测的ccd检测模组。10.如权利要求2至6中任一所述的多规格汇流条端子自动焊接成型设备,其特征在于:所述端子加工生产线还包括承接所述裁切单元裁断端子的第一支撑载台;所述第一支撑载台上设置有限定端子位置的限位凹槽。
技术总结
本实用新型揭示了一种多规格汇流条端子自动焊接成型设备,其包括至少两条端子加工生产线、设置在所述两条端子加工生产线一端的焊接单元、将所述两条端子加工生产线上的端子搬运到所述焊接单元上或将焊接好的端子从所述焊接单元上搬运下料的机器人搬运机构,所述机器人搬运机构按照设定的汇流条形状将端子摆放在所述焊接单元上。本实用新型能够实现多种规格形状汇流条的自动生产,通用性高且产品生产尺寸精度高。产尺寸精度高。产尺寸精度高。
技术研发人员:毛吉亮 庞玉豪 王元君
受保护的技术使用者:苏州晟成光伏设备有限公司
技术研发日:2022.04.29
技术公布日:2022/11/10
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。