1.本技术涉及锁装置技术领域,特别是一种智能锁装置,该智能锁装置能组装于锁体,以驱动锁舌伸缩,实现锁的开关。
背景技术:
2.智能锁装置安装后需要进行校准方可正常使用。目前,智能锁装置的校准步骤非常繁琐,用户需要根据语音提示或者产品说明书记录的操作步骤在合适的时机进行多次手动操作,方可完成校准,这导致用户体验感不是很好。
3.因此,有必要简化智能锁的校准操作,另外,智能锁装置的操作手感、智能程度、使用灵活性、与不同传统锁体的适配性等方面也有提升空间。
技术实现要素:
4.为解决上述技术问题,本技术提供一种智能锁装置,所述智能锁装置包括:
5.输出部件,所述输出部件动作带动所述智能锁装置进行状态切换;
6.手动组件,所述手动组件包括手动部件,所述手动部件与所述输出部件连接,以带动所述输出部件动作;
7.驱动组件,所述驱动组件包括电动部件,所述电动部件与所述输出部件连接,以带动所述输出部件动作;
8.控制组件,所述控制组件包括第一检测装置和控制器;所述第一检测装置与所述输出部件联动,以检测所述输出部件的转动角度和/ 或移动位移;所述控制器与所述电动部件电连接,以控制所述电动部件并获取所述电动部件的当前参数;所述控制器与所述第一检测装置电连接,以获取所述输出部件的当前转动角度值和/或当前移动位移值。
9.智能锁装置的一种实施方式,所述驱动组件还包括传动机构,所述传动机构包括减速组件,所述电动部件通过所述减速组件与所述输出部件传动连接;所述减速组件包括离合组件,以接合或分离所述电动部件与所述输出部件的传动链。
10.智能锁装置的一种实施方式,所述控制组件包括第二检测装置,所述第二检测装置用于检测所述离合组件的当前离合状态,所述控制器与所述第二检测装置电连接,以获取所述第二检测装置的当前状态信息,以使所述控制器能够根据所述第二检测装置的当前状态信息判断所述离合组件的当前离合状态。
11.智能锁装置的一种实施方式,所述第二检测装置设置于能被所述离合组件抵触的位置;当所述离合组件动作到接合状态时,抵触所述第二检测装置至第一状态;当所述离合组件动作到分离状态时,与所述第二检测装置分离,所述第二检测装置复位到第二状态。
12.智能锁装置的一种实施方式,所述传动机构还包括传递组件,所述传递组件与所述输出部件联动,并且,所述传递组件的至少一端与所述第一检测装置适配,以将所述输出部件的动作按预定比例传递至所述第一检测装置,所述预定比例小于1。
13.智能锁装置的一种实施方式,所述减速组件包括减速齿轮组件,所述传递组件包
括传递齿轮组件,所述离合组件包括行星齿轮组件,所述减速齿轮组件的第n级齿轮的齿轮轴为所述传递齿轮组件的输入轴,所述行星齿轮组件位于所述电动部件和所述减速齿轮组件的第n 级齿轮之间。
14.智能锁装置的一种实施方式,所述行星齿轮组件包括太阳轮、行星架、转动设置于所述行星架的第一行星轮和第二行星轮、设置于所述行星架的离合拨片,所述行星架与所述减速齿轮组件的第m级齿轮的齿轮轴同轴转动;
15.当所述行星架转动至第一位置,所述第一行星轮与所述减速齿轮组件的第m 1级齿轮啮合,以驱动所述第m 1级齿轮正向转动;当所述行星架转动至第二位置,所述第二行星轮与所述减速齿轮组件的第m 1级齿轮啮合,以驱动所述第m 1级齿轮反向转动;
16.当所述行星架转动至第一位置及第二位置时,所述离合拨片抵触所述第二检测装置至所述第一状态;当所述行星架位于所述第一位置和所述第二位置之间过渡行程区域时,所述离合拨片与所述第二检测装置分离,使所述第二检测装置复位至所述第二状态。
17.智能锁装置的一种实施方式,所述输出部件包括输出齿轮,所述输出齿轮的第一端与所述手动部件连接,所述输出齿轮的第二端设有用于承插锁芯驱动钥匙的第一承插孔,所述第一承插孔的内周面能与锁芯驱动钥匙的外周面沿周向限位配合,使所述第一承插孔在所述输出齿轮转动时能抵推锁芯驱动钥匙沿周向转动;所述输出齿轮的第二端还设有用于连接承插件的连接部,所述承插件设有用于承插锁芯驱动轴的第二承插孔,所述第二承插孔的内周面能与锁芯驱动轴的外周面沿周向限位配合,使所述第二承插孔在所述输出齿轮转动时能抵推锁芯驱动轴沿周向转动。
18.智能锁装置的一种实施方式,所述手动组件包括弹性施压组件,所述弹性施压组件向所述锁芯驱动钥匙施加弹性力,使所述锁芯驱动钥匙相对锁体插装到位。
19.智能锁装置的一种实施方式,所述弹性施压组件包括弹性部件和压块;所述输出齿轮的第一端设有安装孔,所述安装孔的一端与所述第一承插孔贯通;所述压块安装在所述安装孔中,且能在所述安装孔中轴向移动;所述安装孔的内周面与所述压块的外周面沿周向限位配合,使所述安装孔在所述输出齿轮转动时能抵推所述压块沿周向转动;所述弹性部件设置于所述压块和所述手动部件之间,以保持沿所述安装孔轴向的弹性势能。
20.智能锁装置的一种实施方式,所述控制组件还包括计时器,所述控制器与所述计时器电连接,以获取所述计时器的当前计时模式信息,不同计时模式下所述计时器的计时时长不同。
21.智能锁装置的一种实施方式,所述控制组件还包括信号接收器,所述智能锁装置还包括延时机构,所述延时机构包括指令触发组件;所述指令触发组件用于承受触发动作并传递触发信号;所述信号接收器与所述指令触发组件以及所述计时器电连接,以根据不同的触发动作启动所述计时器的不同计时模式。
22.智能锁装置的一种实施方式,所述指令触发组件包括手动控件、触发信号传递部件和回弹部件,所述手动控件承受触发动作后通过所述触发信号传递部件将触发信号传递给所述信号接收器,所述回弹部件用于将所述手动控件恢复到承受触发动作前的位置。
23.智能锁装置的一种实施方式,所述智能锁装置包括支撑组件,所述支撑组件包括底座、中框和罩设于所述底座顶侧的罩壳;
24.所述底座设有第一安装腔和用于安装电池的第二安装腔,所述中框设有驱动组件
安装腔,所述中框和组装于所述中框的驱动组件均安装在所述第一安装腔中;
25.所述罩壳顶侧设有面板,所述控制组件的控制主板安装在所述底座顶侧和所述罩壳的面板之间;
26.所述延时机构的手动控件和所述手动组件的手动部件对应安装在所述面板的两个安装孔中,所述延时机构和所述手动组件的其余结构安装在所述罩壳和所述底座的围合空间中。
27.智能锁装置的一种实施方式,所述手动控件可转动地安装于所述面板的相应安装孔中或者可拆卸地安装于所述面板的相应安装孔中。
28.智能锁装置的一种实施方式,所述手动部件通过自润滑连接套和自润滑垫圈可转动地安装于所述面板的相应安装孔中。
29.智能锁装置的一种实施方式,所述支撑组件还包括底板,所述底板安装在所述底座的底侧;所述底板设置有第一固定孔、容纳部和第二固定孔,所述容纳部包括相连的多个分部;所述智能锁装置还包括连接组件,所述连接组件包括第一连接件和第二连接件,所述第一固定孔用于穿设所述第一连接件,以对配置于所述容纳部内的部件进行固定,所述第二固定孔用于穿设所述第二连接件,所述第二连接件直接连接锁体或者所述第二连接件通过过渡连接件连接锁体。
30.本技术提供的智能锁装置具有:校准操作简单、操作手感轻便、智能化程度高、整体体积小、集成度高、能根据用户需求进行延时开锁或延时关锁、能与不同传统锁体组装、能适应不同传动锁的智能化改造需求等优势。
附图说明
31.图1为本技术提供智能锁装置一种实施例的立体图;
32.图2-图5为图1不同程度的拆解图;
33.图6为图2中手动组件的承插件的放大图;
34.图7为图2中手动组件另一视角的示意图;
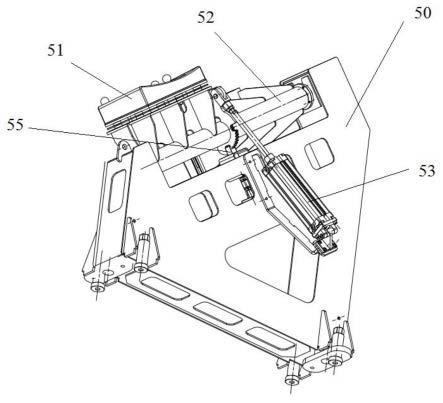
35.图8为智能锁装置在美标锁体上安装时的示意图;
36.图9为智能锁装置组件在日标锁体上安装时的示意图;
37.图10为智能锁装置在欧标锁体上安装时的示意图;
38.图11为图3中传动机构的放大图;
39.图12为图11的主视图;
40.图13为图11的左视图;
41.图14为图11的右视图;
42.图15为行星齿轮组件处于三个不同位置的示意图;
43.图16和图17为图2中底板两个视角的示意图
44.图18为智能锁装置驱动锁舌至开锁状态、半开锁状态和关锁状态的示意图;
45.图19为智能锁装置一种校准流程图;
46.图20为智能锁装置的一种自动开锁流程图;
47.图21为智能锁装置的一种自动关锁流程图;
48.图22为智能锁装置的一种手动开关锁流程图。
49.附图标记说明如下:
50.100手动组件;101输出齿轮,1011第一承插孔,1012连接孔, 1013凹槽,1014通孔,1015安装孔;102手动控制件,1021面板, 1022第一环状壁部,1023第二环状壁部,1024第三环状壁部,1025 第四环状壁部,1026加强筋,1027凸台,1028螺纹孔,1029隆起部; 103承插件,1031第二承插孔,1032连接柱,1033板体,1034第一凸起部,1035第二凸起部;104自润滑连接套,1041套本体,1041a 凸起,1042限位凸圆;105自润滑垫圈;106紧固件;107弹性部件; 108压块,1081圆台。
51.200驱动组件;201电动部件;202减速齿轮组件,2021第一级齿轮传动;2022第二级齿轮传动,2023第三级齿轮传动,2024第四级齿轮传动,2025第五级齿轮传动,202a行星齿轮组件,202a-1卡簧,202a-2行星架,202a-3齿轮轴,202a-4阻尼压簧,202a-5第一行星轮,202a-6第二行星轮;202a-7离合拨片;203传递齿轮组件, 2031齿轮一,2032齿轮轴一,2033齿轮二,2034齿轮轴二,2035末级齿轮轴。
52.300控制组件;301控制主板,302第一检测装置,303信号接收器,304第二检测装置。
53.400延时机构;401手动控件,4011限位部,4012标识,4013限位槽;402触发部件,4021触头;403回弹部件,4031第一通孔,4032 环形凸起,4033触发凸起;404连接件。
54.500支撑组件;501底座,5011短电极弹簧,5012长电极弹簧, 5013绝缘隔板,5014螺钉,501a第一安装腔,501b第二安装腔;502 中框,5021中框本体,5022中框顶盖,5023固定螺钉;503罩壳,5031 第一安装孔,5032第二安装孔,5033第三安装孔,5034弹性限位轴; 504底板,504a薄板部分、504b厚板部分、5041第一固定孔、5042 容纳部、5042-1圆形分部、5042-2条形分部、5043第二固定孔、5044 双面胶、5045缓冲垫、5046耳板、5047螺纹孔、5048卡接部;505 电池壳。
55.600连接组件;601第一连接件,602第二连接件,603过渡连接件。
56.1a美标锁体,1b日标锁体,1c欧标锁体,01锁芯驱动轴,02 锁芯驱动钥匙,03欧标锁芯。
具体实施方式
57.为了使本技术领域的技术人员更好地理解本技术的技术方案,下面结合附图和具体实施方式对本技术的技术方案作进一步的详细说明。
58.参考图1-图4,该智能锁装置包括:输出部件(图中101)、手动组件100、驱动组件200和控制组件300。
59.输出部件动作带动智能锁装置进行状态切换。智能锁装置的状态切换是指从开锁状态切换到关锁状态或者从关锁状态切换到开锁状态。输出部件的动作传递给锁舌,带动锁舌伸缩。
60.具体的,输出部件的动作方式可以是相对锁体旋转,也可以是相对锁体移动。图示实施例中,输出部件包括输出齿轮101,输出齿轮 101的动作方式是相对锁体旋转。
61.如图2,手动组件100与输出部件连接,以带动输出部件动作。手动组件100为选设组件,也就是说,可以设置手动组件100,也可以不设手动组件100。手动组件包括手动部件102,手动部件102与输出部件连接,手动部件102在外力作用下带动输出部件动作。
62.如图3,驱动组件200包括电动部件201,电动部件201与输出部件连接,电动部件201在电力作用下带动输出部件动作。电动部件 201可以与输出部件直接连接,也可以如图示实施例,设置传动机构,传动机构包括减速组件,让电动部件201与输出部件通过减速组件(图中202为减速组件的一部分)传动连接。另外,减速组件可以包括离合组件,利用离合组件(图中202a为离合组件的一部分)接合或分离电动部件201与输出部件的传动链。接合时,电动部件201与输出部件之间的传动链畅通,分离时,电动部件201与输出部件之间的传动链断开。
63.在智能锁装置达到开锁状态或关锁状态后,可以控制离合组件达到分离状态,这样在开锁状态或关锁状态下操作手动部件102时不会反驱电动部件201,同时也使得手动开关锁操作更省力。
64.如图4,控制组件300包括控制器(图中301为控制器的控制主板)和第一检测装置302。
65.第一检测装置302与输出部件联动,能检测输出部件的当前位置参数信息。第一检测装置302的检测方式可以是实时监测,也可以是每间隔预设时长检测一次。当输出部件的动作方式为旋转时,输出部件的位置参数信息包括输出部件的转动角度值,这时,第一检测装置 302可以采用角度定位器。当输出部件的动作方式为移动时,输出部件的位置参数信息包括输出部件的移动位移值,这时,第一检测装置 302可以采用位移传感器。
66.控制器与第一检测装置302电连接,使控制器能够获取输出部件的当前转动角度值和/或当前移动位移值。
67.控制器与电动部件201电连接,使控制器能够控制电动部件201 且能获取电动部件201的当前参数,电动部件201的当前参数包括电动部件的当前电流值和/或其他能够表征电动部件201的当前运行阻力的参数值(比如电阻值)。
68.智能锁装置初次安装后需要进行校准,校准后会记录下开锁状态对应的基准控制参数信息和关锁状态对应的基准控制参数信息。
69.以往,校准过程中需要用户进行繁琐的手动操作。而本技术提供的上述智能锁装置,由于设置了控制组件、驱动组件以及第一检测装置,并让控制组件的控制器与第一检测装置和驱动组件的电动部件电连接,这样大多数校准步骤可以由控制组件的控制器根据第一检测装置的检测数据和电动部件的当前参数等自动控制电动部件完成,减少了校准过程中的手动操作次数,使得整个校准过程非常方便,用户的体验感得以提升。
70.具体的,控制器内存储有预设电流参考值、预设角度参考值或预设位移参考值。一种实施方式中,校准时控制器根据第一检测装置的检测数据和电动部件的当前参数等自动控制电动部件的过程大致是:控制器比较当前电流值与预设电流参考值的大小,和/或,当前转动角度值与预设角度参考值的大小,和/或,当前移动位移值与预设位移值的大小得到比较结果。然后,控制器根据比较结果控制电动部件201 的动作方向,和/或,记录智能锁装置的开锁状态或关锁状态下对应的当前电流值、当前转动角度值和当前移动位置值中的至少一种。
71.具体的,控制器控制智能锁装置自关锁状态切换到开锁状态,切换到开锁状态时,控制器记录下开锁状态时对应的基准控制参数信息。控制器控制智能锁装置自开锁状态切换到关锁状态,切换到关锁状态时,控制器记录下关锁状态时对应的基准控制参数信息。需
说明,一些锁体设有多种锁舌,如图18中的锁体设有斜舌和方舌两种锁舌。本技术的描述中将所有锁舌全部向外伸出的状态称为关锁状态,将所有锁舌全部向内缩回的状态称为开锁状态,将部分锁舌伸出、部分锁舌缩回的状态称为半开锁状态。
72.具体的,一种实施方式中,根据比较结果控制电动部件201的动作方向包括:当电动部件的当前电流值小于预设电流参考值并且输出部件的当前转动角度值大于预设角度参考值时(也就是说这两个条件同时成立时),控制电动部件带动输出部件继续按当前方向转动,否则(即这两个条件都不成立或者任一者不成立),控制电动部件带动输出部件按与当前方向相反的方向转动。
73.具体的,一种实施方式中,根据比较结果记录智能锁装置的开锁状态或关锁状态下对应的基准控制参数信息可以包括:当比较结果为电动部件的当前电流值大于预设电流参考值并且输出部件的当前转动角度值大于预设角度参考值时(此时可确定智能锁装置处于开锁状态或关锁状态),记录输出部件的转动角度值和/或电动部件的电流值。
74.记录的开锁状态时对应的基准控制参数信息作为智能锁装置后续执行开锁指令时的控制基准。记录的关锁状态时对应的基准控制参数信息作为智能锁装置后续执行关锁指令时的控制基准。也就是说,记录了基准控制参数信息后,后续执行开关锁指令时,会判断当前控制参数信息是否达到了记录的基准控制参数信息,当判断达到时,确定执行指令成功。
75.举例来说,以记录的基准控制参数信息包括开锁状态对应的电动部件的电流值(以下称为开锁电流基准值)和开锁状态对应的输出部件的转动角度值(以下称为开锁转动角度基准值)为例。记录了这两个基准值后,后续执行开锁控制指令时,会判断输出部件的当前转动角度值是否达到开锁转动角度基准值和/或判断电动部件的当前电流值是否达到开锁电流基准值。当判断输出部件的当前转动角度值达到开锁转动角度基准值时,或者,当判断输出部件的当前转动角度值达到开锁转动角度基准值且电动部件的当前电流值达到开锁电流基准时,确定开锁指令执行成功。当判断输出部件的当前转动角度值一直未达到开锁转动角度基准值时,确定开锁指令执行失败,此时应停机进行故障排查。
76.具体的,图19为本技术提供的智能锁装置的一种校准流程图。该校准流程图中智能锁装置进行了两次状态切换。具体是:先在离合组件处于分离状态时(此时离合组件的行星架处于图15中的f位置),手动操作智能锁装置至关锁状态(此时智能锁装置的全部锁舌均处于伸出状态,即图18中a所示的状态)。然后控制器控制驱动组件的电动部件(具体可以为电机)开锁,并判断电机的当前电流值是否小于预设的电流参考值和输出部件的当前转动角度值是否大于预设的角度参考值。当判断两者均为是时,表明电机的当前转动方向是开锁方向,所以控制电机继续按当前转动方向转动,当判断两者中任一者为否或者两者均为否时,表明电机的当前转动方向不是开锁方向,所以控制电机按与当前转动方向相反的方向转动。然后在判断电机的当前电流值大于预设的电流参考值且输出部件的当前转动角度值大于预设的角度参考值时(这时智能锁装置的全部锁舌均处于缩回状态,即达到了图18中c所示的开锁状态),这时记录电机的当前电流值和输出部件的当前转动角度值,将记录的值作为实际使用过程中的执行开锁指令时的控制基准值。然后手动开门后控制电机按与当前方向相反的方向旋转,直至离合组件再次达到分离状态(此时离合组件的行星架处于图15中的f位置,智能锁装置处于图18中b所示的半开锁状态)。然后手动关门后控制电机
关锁。然后在判断电机的当前电流值大于预设的电流参考值且输出部件的当前转动角度值大于预设的角度参考值时(这时智能锁装置的全部锁舌均处于伸出状态,即达到了图18中a 所示的关锁状态),这时记录电机的当前电流值和输出部件的当前转动角度值,将记录的值作为实际使用过程中的执行关锁指令时的控制基准值。然后控制电机按与当前方向相反的方向旋转,直至离合组件再次达到分离状态(此时离合组件的行星架处于图15中的f位置)。至此完成了开锁校准和关锁校准。
77.从上述描述可知,采用本技术提供的智能锁装置整个校准过程不需要用户进行繁琐的手动操作,整个校准过程非常方便,使用户的体验感得以提升。
78.另外,本技术提供的智能锁装置,可以自动开关锁(图20和图 21分别为一种自动开锁流程图和一种自动关锁流程图),还可以手动开关锁(图22为一种手动开关锁流程图),能充分满足用户对开关锁方式多样化的需求。
79.进一步的方案中,在驱动组件200设有上述离合组件的情况下,控制组件300可以设置第二检测装置304。
80.控制器与第二检测装置304电连接,使控制器能够获取第二检测装置304的当前状态信息,从而能够根据第二检测装置304的当前状态信息判断离合组件的当前离合状态。通过判断离合组件的当前离合状态,可以在每次开锁或关锁后都使离合组件回归到分离状态,这样在操作手动部件进行开关锁时,不会反驱电动部件,也使得操作手动部件时更省力。
81.具体的,第二检测装置304可以采用微动开关或者其他能随着离合组件的接合或分离发生状态变化的部件。
82.具体的,第二检测装置304布置在能被离合组件抵触的位置。当离合组件动作到接合状态时,抵触第二检测装置304至第一状态;当离合组件动作到分离状态时,与第二检测装置304分离,第二检测装置复位到第二状态。
83.具体的,第二检测装置304的检测方式可以是实时监测,也可以是每间隔预设时长检测一次。
84.再进一步的方案中,控制组件还设置了计时器。控制器与计时器电连接,以获取计时器的当前计时模式信息。计时器在不同计时模式下,计时时长不同。通过获取计时器的当前计时模式信息,可以在开锁后根据计时器的当前计时模式信息延时一段时间再关锁,满足短时间无需关锁的用户需求。
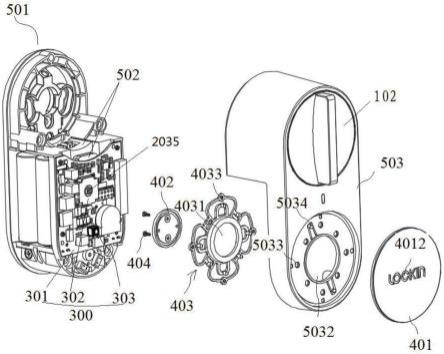
85.进一步地,参考图4和图5,当控制组件300设有计时器时,控制组件300还可以设置信号接收器303,并且,智能锁装置还可以包括延时机构400。
86.延时机构400包括指令触发组件。指令触发组件用于承受触发动作并传递触发信号。信号接收器303与指令触发组件以及计时器电连接,以便能通过向指令触发组件施加不同的触发动作来启动计时器的不同计时模式。图中,指令触发组件包括手动控件401、触发信号传递部件402和回弹部件403,当然指令触发组件的结构不局限于此,只要能接受并传递触发信号的结构即可。
87.进一步地,参考图1-图4,智能锁装置还包括支撑组件500。支撑组件500可以包括底座501、中框502、罩壳503、底板504和电池壳505。
88.如图2,罩壳503罩设在底座501顶侧。底板502固定在底座501 底侧。电池壳505可
拆卸地安装在底座501周侧,用以遮挡电池。
89.如图3,底座501设有第一安装腔501a和第二安装腔501b。第二安装腔501b用于安装电池,由电池给控制组件300、驱动组件200 等用电结构供电。底座501还安装有短电极弹簧5011、长电极弹簧5012 和绝缘隔板5013。绝缘隔板5013可以为绝缘塑料材质,通过胶粘的方式与底座501固定,对电极起到限位作用,同时起到绝缘隔离的作用。底座还穿设有螺钉5014,通过螺钉5014连接中框502。
90.如图3,中框502包括中框本体5021、中框顶盖5022和固定螺钉5023,中框顶盖5022通过固定螺钉5023紧固在中框本体5021顶侧。中框本体5021设有用于安装驱动组件200的安装腔。中框502 和组装于中框502的驱动组件200均安装在底座501的第一安装腔 501a中。
91.如图4,罩壳503罩设在底座501顶侧。罩壳503的顶侧设有面板,控制组件300的控制主板301安装在底座501顶侧和罩壳503的面板之间。
92.延时机构400的手动控件401和手动组件100的手动部件102对应安装在罩壳503的面板的两个安装孔中,延时机构400和手动组件 100的其余结构安装在罩壳503和底座501的围合空间中。
93.采用上述支撑组件500,实现了手动组件100、驱动组件200、控制组件300以及延时机构400的集成安装,使智能锁装置整体体积小、集成度高。
94.下面对照图示实施例对智能锁装置的手动组件、驱动组件、延时机构等作进一步的详细说明。
95.手动组件100
96.参考图2以及图6-图10。
97.手动控制件102连在输出齿轮101的第一端,并可转动地安装在罩壳503的面板的第一安装孔5031中。
98.输出齿轮101的第二端设有第一承插孔1011,用于承插欧标锁体 1c的锁芯驱动钥匙02。第一承插孔1011的内周面能与锁芯驱动钥匙 02的外周面沿周向限位配合,使第一承插孔1011在输出齿轮101转动时能抵推锁芯驱动钥匙02沿周向转动。
99.输出齿轮101的第二端还设有用于连接承插件103的连接部(图中1012)。承插件103设有第二承插孔1031,用于承插美标锁体1a 或日标锁体1b的锁芯驱动轴01。第二承插孔1031的内周面能与锁芯驱动轴01的外周面沿周向限位配合,使第二承插孔1031在输出齿轮 101转动时能抵推锁芯驱动轴01沿周向转动。
100.当将该手动组件100组装在欧标锁体1c上时,不用连接承插件 103。组装好后,欧标锁体的锁芯驱动钥匙02的一端伸到输出齿轮101 的第一承插孔1011中,当转动手动控制件102带动输出齿轮101转动时,锁芯驱动钥匙02随之转动,以此实现锁的开关。
101.当将该手动组件100组装在美标锁体1a或者日标锁体1b上时,需在输出齿轮101的连接部上连接承插件103。组装好后,美标锁体 1a或者日标锁体1c的锁芯驱动轴01的一端伸到承插件103的第二承插孔1031中,当转动手动控制件102带动输出齿轮101转动时,承插件103随之转动,进而带动锁芯驱动轴01转动,以此实现锁的开关。
102.通过在手动组件100的输出齿轮101的连接部上连接不同规格的承插件103(不同规格的承插件103的第二承插孔1031的外形尺寸不同),就能使转动组件能够与不同规格的
日标锁体或者不同规格的美标锁体组装。
103.因此,上述手动组件100能与传统欧标锁体、不同规格的传统日标锁体、不同规格的传统美标锁体组装,因此能够满足传统锁的低成本智能化改造需求。
104.手动控制件102与输出齿轮101可以采用图示实施例中的连接结构,也可以采用其他连接结构,只要保障连接好后手动控制件102和输出齿轮101能相互带动着一起转动即可。图示实施例中,输出齿轮 101与手动控制件102通过紧固件106连接,这种连接结构简单且容易拆卸和组装。具体是,输出齿轮101设有轴向通孔1014,手动控制件102朝向输出齿轮101的一侧设有凸台1027,凸台1027设有螺纹孔1028。组装好后,紧固件106的头部与输出齿轮101抵触,紧固件 106的螺纹部穿过输出齿轮101的轴向通孔1014拧接于手动控制件 102的螺纹孔1028,用户从外侧看不到紧固件106。
105.承插件103的结构可以根据实际需要灵活设计,可以采用图示实施例中的结构,也可以采用其他具有足够强度的结构。图示实施例中,承插件103包括板体1033。板体1033朝向输出齿轮101的一侧设有第一凸起部1034,板体1033朝向自动开锁装置的底板300的一侧设有第二凸起部1035,第二承插孔1031贯通第一凸起部1034、第二凸起部1035和板体1033。这种结构的承插件103强度高且能保障第二承插孔1031具有足够的深度,从而能给锁芯驱动轴01提供足够的插装深度,从而能保障第二承插孔1031和锁芯驱动轴01的可靠传动。组装好后,第一凸起部1034伸到输出齿轮101的第一承插孔1011中。另外,输出齿轮101朝向锁体的一端端面还可以设置凹槽1013,组装好后,承插件103的板体1033位于凹槽1013中,这样,组装好后的手动组件100的轴向尺寸较小。
106.承插件103与输出齿轮101可以采用图示实施例中的连接结构,也可以采用其他连接结构,只要保障连接好后承插件103能随输出齿轮101转动即可。图示实施例中,输出齿轮101和承插件103通过多组相互插接的连接孔1012和连接柱1032实现连接,这种连接结构简单且易于拆卸和组装。图中,连接孔1012设于输出齿轮101,连接柱 1032设于承插件103并位于承插件103的第一凸起部1034的侧方,当然连接孔1012和连接柱1032的位置也可调换,或者,承插件103 和输出齿轮101均设有连接柱和连接孔。
107.进一步的,手动组件100还可以包括自润滑连接套104和自润滑垫圈105。通过自润滑连接套104和自润滑垫圈105实现与罩壳503 的第一安装孔5031的自润滑连接。
108.具体的,自润滑连接套104包括套本体1041,手动控制件102朝向输出齿轮101的一侧设有第一环状壁部1022,套本体1041穿设在第一安装孔201中且套在手动控制件102的第一环状壁部1022外周。自润滑垫圈105套装在套本体1041内周面和第一环状壁部1022之间。套本体1041相对第一安装孔201周向固定,也就是说,套本体1041 无法沿周向转动。因而当手动控制件102转动时,套本体1041不动,手动控制件102所受的摩擦力仅来自于自润滑垫圈105与自润滑套本体1041,因此,手动控制件102转动时所受的摩擦力小,转动顺畅。
109.具体的,套本体1041相对安装孔1015周向固定的实现方式多种多样,例如可以采用图示实施例中的方式:在套本体1041的外周面设置凸起1041a,在第一安装孔201的内周面设置凹陷,组装好后,套本体1041外周面上的凸起1041a嵌到第一安装孔201内周面上的凹陷中。再例如也可以采用径向销定位的方式。
110.进一步的,自润滑连接套104还可以设置限位凸圆1042,限位凸圆1042设置在套本体1041的一端外周,组装好后,限位凸圆1042 位于外壳200内部并与外壳200抵触,起到限
定自润滑连接套104的轴向位置的作用。
111.进一步的,手动组件100还可以包括弹性施压组件,弹性施压组件向锁芯驱动钥匙02施加弹性力,使锁芯驱动钥匙相对锁体插装到位。图示实施例中,弹性施压组件包括弹性部件107和压块108。手动组件100包括弹性部件107和压块108时,输出齿轮101远离锁体的一端设安装孔1015,安装孔1015的一端与第一承插孔1011贯通。当然,弹性施压组件的结构不局限于此,只要能向向锁芯驱动钥匙02 施加弹性力的结构即可。
112.图示实施例中,压块108安装在安装孔1015中,安装孔1015的内周面与压块108的外周面沿周向限位配合,使安装孔1015在输出齿轮101转动时能抵推压块108沿周向转动。并且,压块108能在安装孔1015中轴向移动。弹性部件107压缩安装在压块108和手动控制件 102之间。
113.当与欧标锁体组装后,锁芯驱动钥匙02的一端与压块108抵触,压块108在弹性部件107的弹性力作用下紧压锁芯驱动钥匙02,保障锁芯驱动钥匙02相对锁体插装到位,这样设计能降低因锁芯驱动钥匙 02插装不到位导致无法实现开关锁的风险。
114.进一步的,当手动组件100包括弹性部件107时,压块108和手动控制件102两者均可以设置用于连接弹性部件107的弹性部件连接部,当然也可以仅一者设置弹性部件连接部。
115.图示实施例中,弹性部件107的形状为圆柱形,压块108上的弹性部件连接部是设置在压块108朝向弹性部件107的一侧的圆台 1081,手动控制件102上的弹性部件连接部是设置在手动控制件102 朝向弹性部件107一侧的环形腔,手动控制件102朝向弹性部件107 的一侧设有第二环状壁部1023和环绕在第二环状壁部1023外周的第三环状壁部1024,环形腔形成在第二环状壁部1023和第三环状壁部 1024之间。当然,弹性部件连接部的结构形式可以根据弹性部件107 形状灵活设计,不局限于图示实施例。
116.图示实施例中,手动控制件102还设有面板1021、第四环状壁部 1025和隆起部1029。第四环状壁部1025、第一环状壁部1022、第三环状壁部1024、第二环状壁部1023均设于面板1021朝向输出齿轮101 的一侧,且四者自面板1021的外周向面板1021的中心依次设置。第一环状壁部1022和第四环状壁部1025之间连有加强筋1026,第一环状壁部1022和第三环状壁部1024之间也连有加强筋1026。隆起部 1029设置在面板1021朝向用户的一侧,以供用户捏持。这种结构的手动控制件102便于用户操作且强度高、不易损坏。当然,手动控制件102的结构可以根据实际需要灵活设计,不局限于图示实施例。
117.驱动组件200
118.参考图3以及图11-图15。
119.驱动组件200包括电动部件201和传动机构。电动部件201可以为电机,当然也可以为其他动力部件。传动机构包括减速组件,减速组件包括减速齿轮组件202,当然,减速组件不局限于齿轮形式。另外,减速组件还包括离合组件。图示实施例中,离合组件包括行星齿轮组件202a,当然离合组件不局限于行星齿轮形式。
120.进一步的,驱动组件200还可以包括传递组件。传递组件与输出部件联动,传递组件的至少一端与第一检测装置302适配,以将输出部件的动作按预定比例传递至第一检测装置302,所述预定比例小于1。这样设置,更利于提升第一检测装置302的检测精度。
121.图示实施例中,传递组件包括传递齿轮组件203,当然,传递组件不局限于齿轮形
式。输出部件采用输出齿轮101,第一检测装置302 采用角度电位器。传递齿轮组件203的末级齿轮轴2035(见图6)的一端部与角度电位器302的电位器孔沿孔周向限位配合,从而能够将输出齿轮101的转动按预定比例传递至角度电位器,预定比例小于1。这样设置,可以实现输出齿轮101转动多圈、角度电位器302转动小于一圈的技术效果。
122.当传递组件包括传递齿轮组件203、减速组件包括减速齿轮组件 202时,减速齿轮组件202的第n级齿轮的齿轮轴为传递齿轮组件203 的输入轴,同时让行星齿轮组件202a位于电动部件201的输出轴和减速齿轮组件202的第n级齿轮之间。也就是说,沿电动部件201至输出齿轮101的动力传递方向,行星齿轮组件202a位于传递齿轮组件203的上游,这样行星齿轮组件202a断开减速齿轮组件202后,传递齿轮组件203依旧与输出齿轮101联动,角度电位器302依旧可以通过传递齿轮组件203的末级齿轮轴2035实现对输出齿轮101转动角度的检测。
123.在一种具体实施方式中,减速齿轮组件202的最后一级齿轮与输出齿轮101啮合,减速齿轮组件202的最后一级齿轮的齿轮轴为传递齿轮组件203的输入轴。即传递齿轮组件203的输入轴可以直接固定安装于减速齿轮组件202的最后一级齿轮的齿轮轴。
124.图中示出了减速齿轮组件202包括五级齿轮传动的具体结构,分别为:第一级齿轮传动2021、第二级齿轮传动2022、第三级齿轮传动 2023、第四级齿轮传动2024、第五级齿轮传动2025,其中每一级齿轮传动包括齿轮轴和设置于齿轮轴上的两个同步转动且直径不同的齿轮部,不同径的两齿轮部可以为一体结构,当然也可以为分体式结构。该实施例中行星齿轮组件202a设置于第一级齿轮传动2023和第四级齿轮传动2024之间,用于实现第一级齿轮传动2023和第四级齿轮传动2024的接合和分离。
125.一种具体实施例中,第五级齿轮传动2025的齿轮轴固定有并排的第一齿轮部和第二齿轮部,第一齿轮部与输出齿轮101啮合,第二齿轮部为检测齿轮组件的输入齿轮。第一齿轮部和第二齿轮部可以为同一齿轮的两直径不同的部分,当然也可以为两个独立的齿轮。
126.该实施例中,传递齿轮组件203的输入齿轮直接与减速齿轮组件 202的最后一级齿轮传动的齿轮轴连接固定,有利于整体结构紧凑。
127.在一种具体实施方式中,传递齿轮组件203包括三级减速,分别为:齿轮一2031和齿轮轴一2032、齿轮二2033和齿轮轴二2034,末级齿轮轴2035及其上的齿轮三(未标号),其中齿轮一2031、齿轮二 2033均包括大径齿轮部和小径齿轮部,分别用于与上一级齿轮啮合和与下一级齿轮啮合。
128.具体地,末级齿轮轴2035其中一端部的周壁具有平行于轴向的扁平部,扁平部至少部分位于角度电位器302的电位器孔内部,以获取输出齿轮101的转动角度。该检测方式简单易行,减少智能锁装置空间占据。
129.在一种具体实施方式中,行星齿轮组件202a包括太阳轮、行星架202a-2、转动安装于行星架202a-2的第一行星轮202a-5和第二行星轮202a-6。行星架202a-2安装于智能锁的中框502,行星架202a-2 能与减速齿轮组件202的第m级齿轮的齿轮轴同轴转动。
130.一种实施方式中,行星齿轮组件202a的太阳轮固定于第一级齿轮传动2023的转动轴,具体为第一级齿轮传动2023上的小径轮,第一行星轮202a-5和第二行星轮202a-6可以可选择地与第四级齿轮传动23上的大径轮啮合。
131.一种实施方式中,第一行星轮202a-5和第二行星轮202a-6转动安装于与行星架202a-2相对固定的两个齿轮轴202a-3上,两齿轮轴可以穿过行星架202a-2然后通过卡簧202a-1与行星架202a-2相对限位固定。进一步地,第一行星轮202a-5和第二行星轮202a-6与行星架202a-2之间均设置有阻尼压簧202a-4。阻尼压簧202a-4的作用是将弹簧的弹性压力转化为行星轮自转的阻力,当行星轮自转有一点微弱阻力时,行星架才能摆动,才能啮合到下一级齿轮(第四级齿轮传动23)传动,假设没有阻尼压簧,行星轮可能会一直在原地自转,无法公转到啮合位置。
132.如图15,行星齿轮组件202a的离合原理是:通过电动部件201 的输出轴的转动,带动行星架202a-2转动,使得两行星轮与减速齿轮组件202的齿轮脱离啮合。当行星架202a-2转动至第一位置时,第一行星轮202a-5与第m 1级齿轮啮合,以驱动第m 1级齿轮正向转动。当行星架202a-2转动至第二位置时,第二行星轮202a-6与第 m 1级齿轮啮合,以驱动第m 1级齿轮反向转动。当行星架位于第一位置和第二位置之间过渡行程区域(如图中第三位置)时,第一行星轮202a-5和第二行星轮202a-6与第m 1级齿轮非接触,电动部件201与输出齿轮101的传动链处于断开状态。
133.进一步的,行星齿轮组件202a还可以设有离合拨片202a-7,具体的,行星架202a-2上有一伸出轴与离合拔片202a-7连接。当行星架202a-2转动到接合位置(图15中第一位置或第二位置时),离合拨片202a-7向不同的方向压抵第二检测装置304,使第二检测装置处于第一状态。当行星架202a-2转动到断开位置(图中第三位置),离合拨片202a-7不再压抵第二检测装置304,这时第二检测装置304复位到第二状态。
134.具体的,第二检测装置设有触头,图中,第二检测装置处于第一状态时,其触头被离合拨片202a-7拨动着转动到预定角度位置,第二检测装置处于第二状态时,其触头与离合拨片分离,其触头在弹性件的弹性力作用下复位到初始角度位置。
135.延时机构400
136.参考图4和图5。
137.延时机构400包括指令触发组件。指令触发组件承受不同的触发动作后能向控制组件300的信号接收器303传递不同的触发信号,由控制组件300的信号接收器303接收触发信号后启动控制组件300的计时器的不同计时模式,不同计时模式的计时时长不同。
138.例如,一种计时模式的计时时长为0分钟,如果启动的是该计时模式,则开锁后会即时关锁,关锁后会即时开锁。另一种计时模式的计时时长为10分钟,如果启动的是该计时模式,则开锁后会延时10 分钟再关锁,关锁后会延时10分钟再开锁。
139.图示实施例中,指令触发组件包括手动控件401。具体的,手动控件401可以有多种不同的实施方式,如可以采用机械式的按键(图中为按键)或触控键等方式。触发动作也有多种,以按键为例,可以根据按压按键的次数来进行信号识别,具体地,当按压一次时,触发信号为即时开锁或即时关锁,结合智能锁当前的状态,若当前处于开锁状态,则该触发信号为即时关锁,若当前处于关锁状态,则该触发信号为即时开锁;当按压两次时,触发信号为延时关锁;以触控键为例,可以根据触摸触控键的时间长短来进行信号识别,具体地,当触摸时间不超过5s时,触发信号为即时开锁或即时关锁,结合智能锁当前的状态,若当前处于开锁状态,则该触发信号为即时关锁,若当前处于关锁状态,则该触发信号为即时开锁;当触摸时间超过5s时,触发信号为延时关锁。相适应地,触发信号的传递方式也有多种,以触
控键为例,信号接收器可以设置为红外感应装置;当然,具体的触摸时间、延时时间均可以根据实际需求在终端设备,如手机等进行调整。
140.图示实施例中,指令触发组件还包括触发部件402以及回弹部件 403。回弹部件403可以为弹臂按键或者其他具有弹性恢复力的部件。触发部件402可以设有触头4021。
141.手动控件401和触发部件402轴向限位安装于回弹部件403的两侧,并且周向可转动,当手动控件401受到按压力时,手动控件401 能够带动触发部件402、以及回弹部件403的中部沿轴向移动,触头 4021触发控制信号接收器303的触点,而由于回弹部件403四周固定于罩壳503,回弹部件403便处于蓄能状态;当按压力撤销时,手动控件401和触发部件402便能够在回弹部件403的恢复力作用下回弹至初始位置。
142.图示实施例中,回弹部件403的四周固定于罩壳503的内侧壁,中部具有第一通孔4031,第一通孔4031内壁设置有环形凸起4032。
143.图示实施例中,手动控件401在内侧设置有限位部4011,触发部件402和手动控件401的中部通过连接件404(如螺钉、螺栓等)进行固定,限位部4011能够穿过罩壳503的第二安装孔5032,并和触发部件402分设于环形凸起4032的两侧。
144.图示实施例中,回弹部件403四周靠近边缘的位置还设置有触发凸起4033,触发凸起4033穿过罩壳503的面板上的第三安装孔5033,并与手动控件401的内侧壁相抵。如上设置,当用户按压到手动控件 401的边缘时,触发部件402也能够有效地触发到信号接收器303的触点。
145.图示实施例中,回弹部件403通过热熔柱的方式固定于罩壳的内侧壁,实际应用中,回弹部件403也可以通过连接件404等进行固定。回弹部件403的材质可以为橡胶。触发部件402和手动控件401的固定方式不做限制,如还可以通过卡接固定;固定触发部件402和手动控件401的连接件404数量也不做限制,如可以为至少一个,能够保证二者的连接稳定性即可。
146.手动控件401可以可转动地安装于罩壳503的第二安装孔5032 中,这样当手动控件401外侧设置有标识4012时,无论智能锁以向上或向下的方向进行安装,标识4012都可以转动到正立的位置,即满足智能锁装置不同方向的安装需求。
147.或者,也可以通过让手动控件401可拆卸来满足智能锁装置不同方向的安装需求,当智能锁反向安装时,可以将手动控件401拆离,并调整到正立的位置重新安装。
148.进一步地,手动控件401内侧壁可以设置限位槽4013,罩壳503 的面板设有弹性限位轴5034,该弹性限位轴5034可以插装于限位槽 4013内,手动控件401受到旋钮力时,弹性限位轴5034还能够脱离限位槽4013。通过设置该弹性限位轴5034与限位槽4013,既便于标识4012方向的调节,也能够保证标识4012稳定地处在正立的方向。弹性限位轴5034与限位槽4013的数量和位置不做限制,可以根据实际需求进行设置。
149.支撑组件500和连接组件600
150.上文已经对支撑组件500的罩壳503、电池壳502、底座501进行了介绍,这里着重介绍下支撑组件500的底板504。
151.参考图8-图10以及图16和图17。
152.如图16和图17,底板504设置有第一固定孔5041和容纳部5042,容纳部5042包括圆形分部5042-1和条形分部5042-2,条形分部5042-2 和圆形分部5042-1相连,第一固定孔
5041用于穿设第一连接件601 (见图8-图10),以对配置于容纳部5042内的部件进行固定;底板 504还设置有第二固定孔5043,第二固定孔5043用于穿设第二连接件 602(见图8-图10)。
153.底板504设置有容纳部5042,容纳部5042所设置的圆形分部 5042-1和条形分部5042-2可以和欧标锁体1c的欧标锁芯03的外部轮廓相适配(参见图10,在对传统的欧标锁体1c进行升级改造时,可以将欧标锁芯03插装于容纳部5042,然后通过穿设于第一固定孔 5041的第一连接件601进行固定;对于美标锁体1a和日标锁体1b,则可以通过穿设于第二固定孔5043的第二连接件602进行固定。
154.如此设置,该底板504既可以适应在对传统的欧标锁体1c的安装固定,又可以适应在传统的美标锁体1a和日标锁体1b的安装固定,通用性更强。
155.需要说明的是,上述的包括圆形分部5042-1和条形分部5042-2 的容纳部5042仅是为了和传统的欧标锁体1c相适配,如果是针对其他的与欧标锁体1c相类似的锁芯突出的传统锁进行升级改造时,容纳部5042的结构形式也可以发生适应性的变化;也就是说,容纳部 5042所包括的分部并不局限于上述的圆形分部5042-1和条形分部 5042-2,其也可以设计为其他的结构形式,只要能够实现锁芯插装于容纳部5042的技术效果即可。
156.这里,本技术实施例并不限定两个固定孔以及两个连接件的结构形式,具体实施时,本领域技术人员可以根据实际需要进行设置,只要能够满足固定安装的要求即可。作为一种示例性的说明,上述的第一连接件601、第二连接件602均可以采用螺纹连接件,如螺钉、螺栓等,上述的第一固定孔5041、第二固定孔5043可以为螺纹连接孔,也可以为未设置螺纹的通孔,这些在具体实践中均可以采用。
157.在一些实施方式中,上述的圆形分部5042-1可以呈孔型,条形分部5042-2可以呈槽型,第一固定孔5041可以设置于条形分部5042-2 的槽底壁。
158.结合图5,采用这种设计,在对欧标锁体1c进行升级装配时,欧标锁芯03可以插装于容纳部5042,并可以与条形分部5042-2的槽底壁相抵,欧标锁芯03的锁芯驱动钥匙02可以自圆形分部5042-1穿过,以便和手动组件100传动连接;第一连接件601则可以穿过第一固定孔5041,并与欧标锁芯03相连,以将底板504固定装配于欧标锁体 1c。
159.在这种方案中,欧标锁芯03需要设置与第一连接件601相适配的螺纹连接孔,以便与穿过第一固定孔5041的第一连接件601进行安装固定。这种方案中的第一固定孔5041的数量可以为一个,也可以为多个。
160.在另一些实施方式中,第一固定孔5041的数量可以为多个,这里的多个是指两个以上;各第一固定孔5041可以沿周向间隔地设置于容纳部5042的外缘,且各第一固定孔5041的轴向与垂直于底板504 的方向可以呈夹角设置,使得穿设于第一固定孔5041的第一连接件 601能够顶紧插装在容纳部5042内的欧标锁芯03。这样,也可以将底板504固定装配于欧标锁体1c。
161.在这种方案中,欧标锁芯03无需设置螺纹连接孔,但需要将第一固定孔5041设置为螺纹连接孔,以便对第一连接件601进行固定。而且,在这种方案中,条形分部5042-2并不局限于上述的槽型,其也可以为孔型,也就是说,容纳部5042可以整体设置为孔型。
162.更为详细的说明,第一固定孔5041的数量可以为三个;其中的一个第一固定孔5041可以设置于圆形分部5042-1的外缘,并可以与条形分部5042-2相对设置;另外的两个
第一固定孔5041则可以设置于条形分部5042-2的外缘,并可以沿条形分部5042-2的延伸方向对称设置。如此,位于三个第一固定孔5041内的三个第一连接件601 可以分别在周向上的不同位置与欧标锁芯03进行抵顶,更有利于保证底板504和欧标锁体1c的连接可靠性。
163.第二固定孔5043的数量以及设置位置可以不做限定,在具体实践中,本领域技术人员可以根据美标锁体1a和日标锁体1b的具体结构等进行确定。作为一种示例性的说明,第二固定孔5043的数量可以为两个,两个第二固定孔5043可以沿条形分部5042-2的延伸方向对称设置,即两个第二固定孔5043可以分别设置在容纳部5042的两侧。
164.第二固定孔5043可以为圆形孔,此时,第二连接件602相对底板504的安装位置是确定的。
165.第二固定孔5043在底板504所在平面内也可以呈现为非圆形孔,此时,第二连接件602的安装位置可以沿着第二固定孔5043在底板 504所在平面内的延伸方向进行调节,这样,本技术所提供智能锁安装部件的适配性可以更强。例如,在底板504所在平面内,第二固定孔5043可以为弧形孔,第二连接件602可以沿弧形的延伸方向调节其安装位置;或者,在底板504所在平面内,第二固定孔5043可以包括相连接的第一孔段和第二孔段,第一孔段的延伸方向和第二孔段的延伸方向可以呈夹角设置,第二连接件602可以在第一孔段和第二孔段内进行位移,以调节其安装位置。
166.在一些可选的实施方式中,底板504可以包括薄板部分504a和厚板部分504b,前述的容纳部5042、第一固定孔5041和第二固定孔5043 均可以设置于厚板部分504b。这样,一方面,可以保证容纳部5042、第一固定孔5041和第二固定孔5043在垂直于底板504的方向上可以具有一定的尺寸,进而可以保证这些结构和位于这些结构内的部件的接合尺寸,例如,可以保证容纳部5042和欧标锁芯03的接合尺寸,更有利于保证连接的可靠性;另一方面,也不需要对底板504进行整体加厚,还有利于节省材料,降低成本,并可以减轻底板504的重量。
167.厚板部分504b可以包括相对的第一面和第二面,薄板部分504a 也可以包括相对的第一面和第二面。厚板部分504b的第一面可以突出于薄板部分504a的第一面、且厚板部分504b的第二面也可以突出于薄板部分504a的第二面,即在垂直于底板的方向上,厚板部分504b 可以突出于薄板部分504a的第一面和第二面。或者,厚板部分504b 的第一面可以和薄板部分504a的第一面相平齐,厚板部分504b的第二面可以突出于薄板部分504a的第二面,此时,对于底板504而言,其第一面整体基本上为一个平面,更有利于底板504与安装基础的贴合。
168.设置于厚板部分504b的第一固定孔5041和第二固定孔5043均可以为沉头孔,这样,能够较好地避免第一连接件601、第二连接件 602在安装后突出厚板部分504b的第二面,从而可以较好地避免底板 504和底座501之间所可能存在的安装干涉问题。
169.进一步地,薄板部分504a的第一面可以设置有缓冲垫5045,用于增大底板504和门体之间的摩擦力,进而可以增大底板504在安装完成后的抗扭转性能,可提高底板504固定的可靠性。
170.缓冲垫5045具体可以为橡胶、硅胶等材料制备,以在增加摩擦力的同时减少对于门体的磨损。缓冲垫5045的数量和形状均可以根据实际需要进行配置,在此不做限定;在附图的实施方式中,缓冲垫5045 可以呈弧形条状,且缓冲垫5045的数量可以为两个,两缓冲
垫5045 可以分别设置于底板504第一面的两端。
171.更进一步地,薄板部分504a的第一面还可以设置有胶安装位,用于在前述的容纳部5042、第二固定孔5043均无法实现固定时,对底板504进行胶接。该胶安装位具体可以为槽型,当然,也可以仅是第一面上所划出的特定区域。胶安装位内所设置的胶可以为双面胶 5044,也可以为液体胶,这些在具体实践中均是可行的。
172.针对日标锁体1b而言,连接组件600可以包括过渡连接件603 锁芯驱动轴01可以安装于锁体驱动槽,用于驱使日标锁芯进行转动;过渡连接件603可以外套装配于锁芯驱动轴01,锁芯驱动轴01可以穿插于过渡连接件603、并插入日标锁体1b中,以对过渡连接件603 的轴向安装位置进行确定,进而能够实现对于锁芯驱动轴01的轴向定位;底板504则可以通过第二连接件602与过渡连接件603相连。
173.底板504与底座501的连接方式可以不做限定,具体实践中,本领域技术人员可以根据实际需要进行设置。
174.在附图的实施方式中,底板504可以设置有螺纹连接结构和/或卡接结构。其中,螺纹连接结构包括但不限于带有螺纹连接孔的耳板 5046、螺纹孔5047等;卡接结构则包括卡接部5048,相应地,底座 501可以设置有卡接配合部,以实现底板504和底座501的卡接装配。
175.以上应用了具体个例对本技术的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本技术的方法及其核心思想。应当指出,对于本技术领域的普通技术人员来说,在不脱离本技术原理的前提下,还可以对本技术进行若干改进和修饰,这些改进和修饰也落入本技术权利要求的保护范围内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。