1.本实用新型涉及温度控制技术领域,具体涉及一种自适应仿生手腕温度控制系统。
背景技术:
2.在很多穿戴设备应用场合,都需要借助人体仿真皮肤进行测试,为了达到更好的测试效果,需要对人体仿真皮肤进行加热达到模拟人体温度的情况,在这个过程中,需要采用温度控制手段对加热进行控制。
3.温度控制涉及材料、热力学、传感器、控制算法等多学科技术,受影响因素较多,现有的控制模型非线性,难以非常精确实时控制,且存在大延迟、大惯性、非线性和不确定性的特征。大多温度控制采用传统pid控制器和自适应pid控制器,传统pid控制器的控制量是加热电流和电压,通过参数调整来改变加热功率和速度,这种系统相对复杂;也有通过控制加热开关时间进行温度控制的,但通过计算加热时间来调整控制参数,没有考虑系统散热情况的改变,如果外界化境变化大,会导致控制产生较大波动。现有的自适应pid控制器多采用最小二乘法实时计算pid参数,或者采集加热速度、历史数据进行参数的优化动态推算,控制方式复杂。由于外界环境温度的影响以及手腕佩戴测试仪器等情况导致外部散热处于变化状态,这些非线性,延迟与惯性因素,要求系统要有很好的自适应特性,将传统pid控制器应用于手腕温度控制时,存在波动大、精度低的问题;若采用自适应pid控制器,则存在控制方式复杂,成本高的问题,难以在市场上推广应用。
技术实现要素:
4.发明目的:本实用新型目的在于针对现有技术的不足,提供一种自适应仿生手腕温度控制系统,通过控制加热薄膜的开关实现对硅胶手腕的加热控制,达到人体手腕温度的模拟需求,具有很好的自适应特性。
5.技术方案:本实用新型所述自适应仿生手腕温度控制系统,包括控制板、开关元器件、加热薄膜、温度采集模块、硅胶手腕,所述控制板通过io端口与所述开关元器件相连,所述开关元器件与所述加热薄膜的电源开关相连,所述加热薄膜、温度采集模块均与硅胶手腕相连,所述温度采集模块的输出端口与控制板的ad采集端口相连;所述控制板输出加热控制信号控制所述开关元器件的打开,所述开关元器件打开时控制所述加热薄膜电源开关的启动,所述加热薄膜启动后对硅胶手腕进行加热,所述温度采集模块用于采集硅胶手腕的温度并传输至所述控制板。
6.进一步完善上述技术方案,所述开关元器件为继电器或可控硅。
7.进一步地,所述加热薄膜采用聚酰亚胺加热膜。
8.进一步地,所述温度采集模块为pt1000热敏电阻。
9.进一步地,所述控制板采用stm32单片机。
10.进一步地,所述控制板通过rs232串口连接有上位机,所述上位机输出温控温度、
温控的开始和停止信号至所述控制板,所述温度采集模块采集所述硅胶手腕当前温度并传输至所述控制板;所述控制板设有pid控制器,所述pid控制器的输入端接收当前温度、温控温度、加热时间、散热时间,pid控制器的输出端输出新的加热时间,所述控制板根据新的加热时间生成加热控制信号。
11.有益效果:与现有技术相比,本实用新型基于模拟人体手腕部分温度控制,采用继电器或可控硅开关控制加热薄膜片加热仿生皮肤上模拟人手腕温度,通过高精度pt1000热敏电阻采集温度,精度可达到0.1度。本实用新型提供的系统,采用开关元器件控制恒压加热的方式,只控制加热的开关时间,将控制对象转换为控制时间,体积小、功耗低、成本低,易于市场推广。采用pid控制器,不仅考虑加热情况,还考虑散热的变化,综合加热时间和散热时间,实时调整加热时间参数,跟随环境变化,快速调整到最佳状态,具有很好的自适应特性。
附图说明
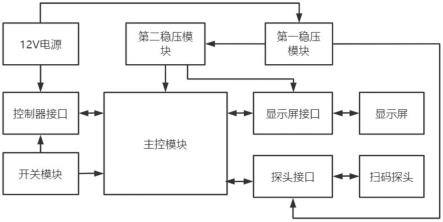
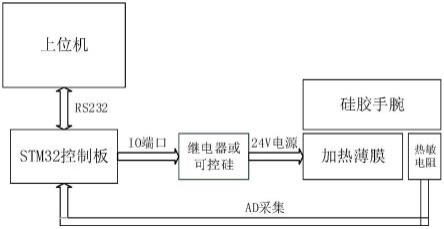
12.图1是本实用新型的电路原理框图;
13.图2是本实用新型的控制效果图。
具体实施方式
14.下面通过附图对本实用新型技术方案进行详细说明,但是本实用新型的保护范围不局限于所述实施例。
15.如图1所示的自适应仿生手腕温度控制系统,包括上位机、控制板、继电器或可控硅、加热薄膜、硅胶手腕、热敏电阻。上位机与控制板进行互连,控制板通过继电器或可控硅与加热薄膜相连,加热薄膜、热敏电阻均与硅胶手腕相连,控制板通过ad采集端口与热敏电阻的输出端口相连;上位机用于参数设置并下传至控制板,控制板根据上位机的参数输出控制信号至继电器或可控硅,继电器或可控硅与加热薄膜相连用于控制加热薄膜的启动、关闭,加热薄膜启动后对硅胶手腕进行加热,热敏电阻用于采集硅胶手腕的温度并传输至控制板,控制板将热敏电阻采集的温度上传至上位机。
16.上位机主要用于实现用户交互功能,包括打开和关闭温控,设置温控温度,实时显示温度。控制板采用stm32单片机,实现与上位机通信,进行pid控制器的控制,采集温度和控制加热。继电器或可控硅,主要来打开驱动和关闭加热薄膜。加热薄膜采用聚酰亚胺加热膜,柔性好,导热性好。热敏电阻,采用高精度pt1000热敏电阻,精度可达到0.1度。硅胶手腕采用硅胶材料,腕部面积较小,导热性、柔软性和散热性比较均匀,控制效果明显。
17.用于实现pid控制器的控制程序已经在github上公开,具体网址为:https://github.com/zhengbuaaa/projects-/blob/main/main.c#l2。
18.采用包含上述pid控制器的控制板进行温度控制的过程如下:
19.1、上位机完成用户交互和参数设置,将相关参数通过rs232串口下传到控制板;
20.2、控制板根据上位机下传的参数,实时采集热敏电阻转换成实时温度,与设置温控温度进行比较得到温差e,采用pid控制器输出加热时间,然后通过开关io端口控制继电器或可控硅的开关;
21.3、继电器或可控硅控制加热薄膜的电源开关,实现温度的控制,热敏电阻实时采
集手腕温度,控制板记录累计加热时间t1;
22.4、加热控制时间t到达后,关闭继电器或可控硅,关闭加热;
23.5、记录散热时间t2;
24.6、控制板将新温差e、t1、t2输入至pid控制器,pid控制器输出下次加热控制时间t;
25.7、控制板根据加热控制时间t控制继电器或可控硅的开启时间进行加热控制,返回步骤3进行循环。
26.其中pid控制器输出加热时间的计算过程如下:
27.1、 t=k*e,根据温差e,计算加热时间t,k是关系系数,k根据温度差e、加热时间t1、散热时间t2来动态计算;
28.2、首先计算初始k0=e0/(t1 t2),就是初始时的基本参数;
29.3、根据第二次采集的数据,计算k1=k0(t1-t2/(t1 t2)),根据新的t1和t2更新参数k;
30.4、计算新的加热时间t=k*e;
31.5、不断循环2到5,达到温度精准控制。
32.pid控制器在开始阶段会出现震荡,但随着循环次数的增加会越来越趋于稳定,在受外界影响较大时,也会及时跟进系统,具有很强的鲁棒性。图2是设置35度控制结果,从开始加热到基本稳定到35度,持续在35度上下波动。
33.如上所述,尽管参照特定的优选实施例已经表示和表述了本实用新型,但其不得解释为对本实用新型自身的限制。在不脱离所附权利要求定义的本实用新型的精神和范围前提下,可对其在形式上和细节上作出各种变化。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。