1.本实用新型涉及一种新型流转治具自动搬运装置,尤其涉及一种工作效率高、镜头良品率高的新型流转治具自动搬运装置。
背景技术:
2.在手机镜头组装过程中,镜片的d角(剪口)角度是一个非常重要的参数,它影响了镜头的成像质量,以前都是人工对位,精度低,效率低,随着摄像头的像素越来越高,镜片数量越来越多,单靠人工对位已经不能满足生产的需求。在手机镜头的组立生产过程中,1号机、2号机之间流转治具由人工进行搬运,有以下较多的缺陷:其一,人工搬运影响生产效率;其二,在人工搬运过程以及取放时,易造成治具中镜筒的位置变化,导致最终镜筒不良。
技术实现要素:
3.本实用新型所要解决的技术问题是提供一种新型流转治具自动搬运装置,具有工作效率高、镜头良品率高的特点。
4.为解决上述技术问题,本实用新型的技术方案为:一种新型流转治具自动搬运装置,其创新点在于:所述新型流转治具自动搬运装置包括前后并排设置的1号机和2号机,所述1号机和2号机之间设置有衔接两者的双向传送带,所述1号机和2号机上分别设置有与所述双向传送带垂直布置的主传送带和次传送带,所述1号机上双向传送带其中一侧设置有第二工位、夹紧或松开主流转治具的第一机械手,所述1号机上双向传送带另一侧设置有第一工位和设置在所述主传送带相应位置处的第一流转治具档停,所述2号机上双向传送带其中一侧设置有第三工位、夹紧或松开次流转治具的第二机械手,所述2号机上双向传送带另一侧设置有第四工位和设置在所述次传送带相应位置处的第二流转治具档停。
5.优选的,所述双向传送带包括立于地面上的底部框架、设置在所述底部框架上方的传送带框架、设置在所述传送带框架上且水平设置的双排传送带、设置在所述底部框架上驱动所述双排传送带的驱动电机。
6.优选的,所述底部框架和地面之间设置有调节地脚。
7.优选的,所述双排传送带包括两个平行设置的传送带a和传送带b;所述传送带框架上设置有位于所述双排传送带上方的尼龙档条。
8.优选的,所述第一机械手包括第一机械手主体、设置在所述第一机械手主体上中心轴线竖直设置的j1传动轴、与所述j1传动轴相连的第一传动臂、与所述第一传动臂通过中心轴线竖直设置的j2传动轴相连的第一机械手连接头、设置在所述第一机械手连接头上且中心轴线竖直设置的j3传动轴、与所述j3传动轴直连的j4传动轴、与所述j4传动轴相连的第一夹爪,所述第一夹爪夹持或者松开所述主流转治具。
9.优选的,所述第一夹爪包括与所述j4传动轴相连对的第一轴环、与所述第一轴环相连的第一夹抱气缸、与所述第一夹抱气缸相连的夹爪块,所述夹爪块夹持或者松开所述主流转治具。
第二工位、7-第一机械手、71-第一机械手主体、72-j1传动轴、73-第一传动臂、74-j2传动轴、75-第一机械手连接头、76-j3传动轴、77-j4传动轴、78-第一夹爪、781-第一轴环、782-第一夹抱气缸、783-夹爪块、784-主流转治具、785-聚氨酯卡块、8-第一工位、9-第二机械手、91-第二机械手主体、92-k1传动轴、93-第二传动臂、94-k2传动轴、95-第二机械手连接头、96-k3传动轴、97-k4传动轴、98-第二夹爪、981-第二轴环、982-第二夹抱气缸、983-第二夹爪块、984次流转治具、985-第二聚氨酯卡块、10-第三工位、11-第一流转治具档停、12-第四工位、13-第二流转治具档停。
具体实施方式
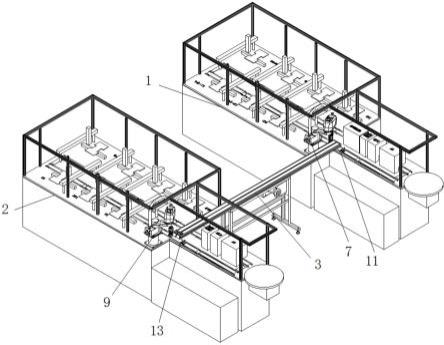
30.本实用新型的流转治具自动搬运装置包括前后并排设置的1号机1和2号机2,1号机和2号机之间设置有衔接两者的双向传送带3,1号机和2号机上分别设置有与双向传送带垂直布置的主传送带4和次传送带5,1号机上双向传送带其中一侧设置有第二工位6、夹紧或松开主流转治具的第一机械手7, 1号机上双向传送带另一侧设置有第一工位8和设置在主传送带相应位置处的第一流转治具档停11, 2号机上双向传送带其中一侧设置有第三工位10、夹紧或松开次流转治具的第二机械手9,2号机上双向传送带另一侧设置有第四工位12和设置在次传送带相应位置处的第二流转治具档停13。通过采用上述结构,1号机组立完成后由机械挡停在第一工位对主流转治具进行限位,第一机械手夹取主流转治具放于传送带a,于传送带a末端由第二机械手抓取放置2号机第三工位,进而后续组立工程。手机镜头在2号机组立成品取出后,空流转治具于第四工位挡停限位,由第二机械手抓取放置传送带b,第四工位处取放至1号机上进行回流。
31.为了很好的实现1号机和2号机之间的传送,双向传送带包括立于地面上的底部框架31、设置在底部框架上方的传送带框架32、设置在传送带框架上且水平设置的双排传送带、设置在底部框架上驱动双排传送带的驱动电机34。底部框架和地面之间设置有调节地脚35,双排传送带包括两个平行设置的传送带a331和传送带b332;传送带框架上设置有位于双排传送带上方的尼龙档条36。
32.上述的第一机械手包括第一机械手主体71、设置在第一机械手主体上中心轴线竖直设置的j1传动轴72、与j1传动轴相连的第一传动臂73、与第一传动臂通过中心轴线竖直设置的j2传动轴74相连的第一机械手连接头75、设置在第一机械手连接头上且中心轴线竖直设置的j3传动轴76、与j3传动轴直连的j4传动轴77、与j4传动轴相连的第一夹爪78,第一夹爪夹持或者松开主流转治具。
33.为了便于很好的抓取主流转治具,第一夹爪包括与j4传动轴相连对的第一轴环781、与第一轴环相连的第一夹抱气缸782、与第一夹抱气缸相连的夹爪块783,夹爪块夹持或者松开主流转治具784。夹爪块与主流转治具之间设置有位于夹爪块上的聚氨酯卡块785,聚氨酯卡块上与主流转治具接触的面由两个斜面组成,两个斜面之间的夹角为120-160度。
34.上述的第二机械手包括第二机械手主体91、设置在第二机械手主体上中心轴线竖直设置的k1传动轴92、与k1传动轴相连的第二传动臂93、与第二传动臂通过中心轴线竖直设置的k2传动轴94相连的第二机械手连接头95、设置在第二机械手连接头上且中心轴线竖直设置的k3传动轴96、与k3传动轴直连的k4传动轴97、与k4传动轴相连的第二夹爪98,第二
夹爪夹持或者松开次流转治具。
35.为了便于很好的抓取主流转治具,第二夹爪包括与k4传动轴相连对的第二轴环981、与第二轴环相连的第二夹抱气缸982、与第二夹抱气缸相连的第二夹爪块983,第二夹爪块夹持或者松开次流转治具984。第二夹爪块与次流转治具之间设置有位于第二夹爪块上的第二聚氨酯卡块985,第二聚氨酯卡块上与次流转治具接触的面由两个斜面组成,两个斜面之间的夹角为120-160度。
36.尽管已经示出和描述了本实用新型的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本实用新型的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本实用新型的范围由所附权利要求及其等同物限定。
技术特征:
1.一种新型流转治具自动搬运装置,其特征在于:所述新型流转治具自动搬运装置包括前后并排设置的1号机和2号机,所述1号机和2号机之间设置有衔接两者的双向传送带,所述1号机和2号机上分别设置有与所述双向传送带垂直布置的主传送带和次传送带,所述1号机上双向传送带其中一侧设置有第二工位、夹紧或松开主流转治具的第一机械手,所述1号机上双向传送带另一侧设置有第一工位和设置在所述主传送带相应位置处的第一流转治具档停,所述2号机上双向传送带其中一侧设置有第三工位、夹紧或松开次流转治具的第二机械手,所述2号机上双向传送带另一侧设置有第四工位和设置在所述次传送带相应位置处的第二流转治具档停。2.如权利要求1所述的一种新型流转治具自动搬运装置,其特征在于:所述双向传送带包括立于地面上的底部框架、设置在所述底部框架上方的传送带框架、设置在所述传送带框架上且水平设置的双排传送带、设置在所述底部框架上驱动所述双排传送带的驱动电机。3.如权利要求2所述的一种新型流转治具自动搬运装置,其特征在于:所述底部框架和地面之间设置有调节地脚。4.如权利要求2所述的一种新型流转治具自动搬运装置,其特征在于:所述双排传送带包括两个平行设置的传送带a和传送带b;所述传送带框架上设置有位于所述双排传送带上方的尼龙档条。5.如权利要求1所述的一种新型流转治具自动搬运装置,其特征在于:所述第一机械手包括第一机械手主体、设置在所述第一机械手主体上中心轴线竖直设置的j1传动轴、与所述j1传动轴相连的第一传动臂、与所述第一传动臂通过中心轴线竖直设置的j2传动轴相连的第一机械手连接头、设置在所述第一机械手连接头上且中心轴线竖直设置的j3传动轴、与所述j3传动轴直连的j4传动轴、与所述j4传动轴相连的第一夹爪,所述第一夹爪夹持或者松开所述主流转治具。6.如权利要求5所述的一种新型流转治具自动搬运装置,其特征在于:所述第一夹爪包括与所述j4传动轴相连对的第一轴环、与所述第一轴环相连的第一夹抱气缸、与所述第一夹抱气缸相连的夹爪块,所述夹爪块夹持或者松开所述主流转治具。7.如权利要求6所述的一种新型流转治具自动搬运装置,其特征在于:所述夹爪块与所述主流转治具之间设置有位于所述夹爪块上的聚氨酯卡块,所述聚氨酯卡块上与所述主流转治具接触的面由两个斜面组成,两个斜面之间的夹角为120-160度。8.如权利要求1所述的一种新型流转治具自动搬运装置,其特征在于:所述第二机械手包括第二机械手主体、设置在所述第二机械手主体上中心轴线竖直设置的k1传动轴、与所述k1传动轴相连的第二传动臂、与所述第二传动臂通过中心轴线竖直设置的k2传动轴相连的第二机械手连接头、设置在所述第二机械手连接头上且中心轴线竖直设置的k3传动轴、与所述k3传动轴直连的k4传动轴、与所述k4传动轴相连的第二夹爪,所述第二夹爪夹持或者松开所述次流转治具。9.如权利要求8所述的一种新型流转治具自动搬运装置,其特征在于:所述第二夹爪包括与所述k4传动轴相连对的第二轴环、与所述第二轴环相连的第二夹抱气缸、与所述第二夹抱气缸相连的第二夹爪块,所述第二夹爪块夹持或者松开所述次流转治具。10.如权利要求9所述的一种新型流转治具自动搬运装置,其特征在于:所述第二夹爪
块与所述次流转治具之间设置有位于所述第二夹爪块上的第二聚氨酯卡块,所述第二聚氨酯卡块上与所述次流转治具接触的面由两个斜面组成,两个斜面之间的夹角为120-160度。
技术总结
本实用新型公开了一种新型流转治具自动搬运装置包括前后并排设置的1号机、2号机、衔接两者的双向传送带,1号机上双向传送带其中一侧设置有第二工位、第一机械手,1号机上双向传送带另一侧设置有第一工位和第一流转治具档停,2号机上双向传送带其中一侧设置有第三工位、第二机械手,2号机上双向传送带另一侧设置有第四工位和第二流转治具档停。1号机组立完成后由机械挡停在第一工位对主流转治具进行限位,第一机械手夹取主流转治具放于传送带A,于传送带A末端由第二机械手抓取放置2号机第三工位,手机镜头在2号机组立成品取出后,空流转治具于第四工位挡停限位,由第二机械手抓取放置传送带B,第四工位处取放至1号机上进行回流。回流。回流。
技术研发人员:王卫 房旭 徐大根 许山虎 王从东
受保护的技术使用者:连云港中蓝光电科技有限公司
技术研发日:2022.04.14
技术公布日:2022/10/27
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。