1.本发明涉及一种无人机辅助的高精度立体空间气体污染检测方法,属于污染检测和无人机应用领域。
背景技术:
2.车辆尾气和工业活动排放产生的pm2.5极大地影响了人们的日常生活。对居住在高污染地区的人们危害更大,长时间暴露于pm2.5会极大增加心肺疾病发病率和死亡率。据统计,pm2.5每年造成近420万人死亡,是世界排名第五的死亡风险因素。2020年中我国仅38.7%的城市pm2.5浓度监测达标,仅29%的城市人口生活环境符合pm2.5浓度标准,部分城市pm2.5人口暴露浓度高达60ug/m3,约为世界平均水平3倍,pm2.5已成为我国大气污染控制中的主要污染物。随着时代的发展,城市环境污染问题愈发突出,且地表可利用空间减少,迫使人类发展逐渐由地面向高空延伸。居民的生产生活与城市微观环境的关系变得更为密切,揭示微观环境下三维空间的pm2.5时空分布规律,能够为城市规划、区域发展、居民健康等提供参考。宏观尺度下的地表空气污染研究虽较为普及,但不能满足现代社会发展的需求。
技术实现要素:
3.针对上述现有技术存在的问题,本发明提供种无人机辅助的高精度立体空间气体污染检测方法,本方法可以实现城市街道或者小区级别的三维空间高精度空气污染物浓度的检测,弥补了现有站点检测方案的站点数量分布过少,以及遥感反演获取的结果精度较低的问题,具体可以用来为城市规划和环境保护提供实用的数据支持。
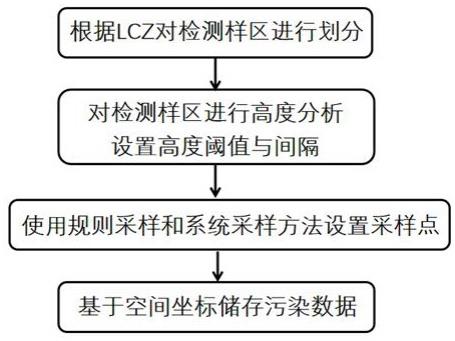
4.为了实现上述目的,本发明采用的技术方案是:一种无人机辅助的高精度立体空间气体污染检测方法,包括以下步骤:s1: 根据lcz(局部气候分区分类)规则,将检测样区分为17个基本类型,包含10个建成环境型(built types,lcz 1~10)以建筑、厂房为主要地物,7个自然环境型(land cover types,lcz a~g)以植被、水体为主要地物;s2: 根据地籍数据获取建筑物高度,使用遥感影像辅助检测是否存在建筑物更新,对检测样区进行高度分析,分别设置建成环境型和自然环境型区域检测高度阈值与间隔;s3: 使用规则采样和系统采样的方法,结合各lcz分区进行采样点的设置;s4: 结合无人机定位模块获取的经纬度和高程数据,储存各采样点精确的空气污染数据。
5.进一步的,所述s1步骤具体为:s11: 通过google earth并结合百度街景影像将研究区域内各类lcz分区的代表区域利用多边形划分为训练样本各类型包含30-40个训练样本;s12: 利用wudapt官网中的lcz generator模型对选定的研究区域内的训练样本
进行lcz分类,生成初步lcz分区图;s13: 将s12中生成的kml文件载入google earth进行验证,对不一致的区域进行训练样本重采并重复s12,直至构建地图与实际情况相吻合。
6.进一步的,所述s2步骤具体为:s21: 获取检测样区的地籍数据,得到具体的建成环境型区域楼层高度;s22: 结合遥感影像数据,辅助检测是否存在建筑物更新;s23: 根据各lcz分区的地物平均高度,结合检测样区所属地政策,设置检测高度阈值;s24: 对各lcz分区分别设置采样高度间隔,针对建成环境型区域:lcz1(密集高层建筑)采样间隔设置为5米、lcz3(密集底层建筑)采样间隔设置为2米;s25: 自然环境型区域参考建成环境型区域设置检测高度间隔,例:lcza(茂密树木)采样间隔设置为5米、lczd(低矮植被)采样间隔设置为2米;s26: 检测高度下限以1米为基础,根据不同环境做适当调整;s27: 针对建成环境型区域,检测上限根据样区中最高建筑物决定,一般情况下设置为30米;s28:针对自然环境型区域,检测上限根据样区地物平均高度决定,植被区域设置为30米,水体区域设置为20米;进一步的,所述s3步骤具体为:s31: 基于s1的检测样区分类结果,使用规则采样的方法对自然环境型区域进行规则采样;s32: 根据每个区域实际情况,低空设置较为密集(间隔≤1米)的采样点;在高空(净空)区域设置较为分散的采样点(间隔≥2米);s33: 基于s1的检测样区分类结果,由于规则采样所设置的采样点可能举例建筑物过近,无法进行采样,所以使用系统采样的方法对建成环境型区域进行系统采样;s34: 在检测样区中剔除地物,获取无人机飞行的安全环境;s35: 根据s34的结果,依照系统采样的方法,在建成环境型区域中设置采样点;s36: 依据s24中高度间隔的设置和s33、s35的结果,获得适用于各区域实际情况的采样点。
7.进一步的,所述s4步骤具体为:再次,空气质量检测仪器在检测过程中将实时回传pm2.5、pm10等多种污染物浓度,无人机定位模块提供经纬度数据以及海拔数据,将采样点精确的污染浓度数据作为属性存储,经纬度数据和高程数据保存为采样点的三维数据;具体的,s41: 将空气质量检测仪器检测频率为1hz,即每秒回传一次当前空气污染浓度;s42: 实时记录无人机飞行位置的经纬度信息和高程信息;s43: 将无人机的飞行位置信息,作为标签赋予空气污染浓度数据,由此获得空间内高精度的空气污染浓度信息。
8.本发明的有益效果是:本方法可以实现城市街道或者小区级别的三维空间高精度空气污染物浓度的检测,弥补了现有站点检测方案的站点数量分布过少,以及遥感反演获
取的结果精度较低的问题,具体可以用来为城市规划和环境保护提供实用的数据支持。
附图说明
9.图1为本发明实施例的流程结构示意图;图2为本发明实施例的规则采样示意图;图3为本发明实施例的系统采样示意图;图4为本发明实施例的污染数据存储示意图。
具体实施方式
10.为使本发明的目的、技术方案和优点更加清楚明了,下面通过附图及实施例,对本发明进行进一步详细说明。但是应该理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限制本发明的范围。
11.除非另有定义,本文所使用的所有的技术术语和科学术语与属于本发明的技术领域的技术人员通常理解的含义相同,本文中在本发明的说明书中所使用的术语只是为了描述具体的实施例的目的,不是旨在于限制本发明。
12.本实施例中,如图1-图4所示,一种无人机辅助的高精度立体空间气体污染检测方法,包括以下步骤:s1: 根据lcz(局部气候分区分类)规则,将检测样区分为17个基本类型,包含10个建成环境型(built types,lcz 1~10)以建筑、厂房为主要地物,7个自然环境型(land cover types,lcz a~g)以植被、水体为主要地物;具体为:s11: 通过google earth并结合百度街景影像将研究区域内各类lcz分区的代表区域利用多边形划分为训练样本各类型包含30-40个训练样本;s12: 利用wudapt官网中的lcz generator模型对选定的研究区域内的训练样本进行lcz分类,生成初步lcz分区图;s13: 将s12中生成的kml文件载入google earth进行验证,对不一致的区域进行训练样本重采并重复s12,直至构建地图与实际情况相吻合;s2: 根据地籍数据获取建筑物高度,使用遥感影像辅助检测是否存在建筑物更新,对检测样区进行高度分析,分别设置建成环境型和自然环境型区域检测高度阈值与间隔;具体为:s21: 获取检测样区的地籍数据,得到具体的建成环境型区域楼层高度;s22: 结合遥感影像数据,辅助检测是否存在建筑物更新;s23: 根据各lcz分区的地物平均高度,结合检测样区所属地政策,设置检测高度阈值;s24: 对各lcz分区分别设置采样高度间隔,针对建成环境型区域:lcz1(密集高层建筑)采样间隔设置为5米、lcz3(密集底层建筑)采样间隔设置为2米;s25: 自然环境型区域参考建成环境型区域设置检测高度间隔,例:lcza(茂密树木)采样间隔设置为5米、lczd(低矮植被)采样间隔设置为2米;
s26: 检测高度下限以1米为基础,根据不同环境做适当调整;s27: 针对建成环境型区域,检测上限根据样区中最高建筑物决定,一般情况下设置为30米;s28: 针对自然环境型区域,检测上限根据样区地物平均高度决定,植被区域设置为30米,水体区域设置为20米s3: 使用规则采样和系统采样的方法,结合各lcz分区进行采样点的设置;具体为:s31: 基于s1的检测样区分类结果,使用规则采样的方法对自然环境型区域进行规则采样;s32: 根据每个区域实际情况,低空设置较为密集(间隔≤1米)的采样点;在高空(净空)区域设置较为分散的采样点(间隔≥2米);s33: 基于s1的检测样区分类结果,由于规则采样所设置的采样点可能举例建筑物过近,无法进行采样,所以使用系统采样的方法对建成环境型区域进行系统采样;s34: 在检测样区中剔除地物,获取无人机飞行的安全环境;s35: 根据s34的结果,依照系统采样的方法,在建成环境型区域中设置采样点;s36: 依据s24中高度间隔的设置和s33、s35的结果,获得适用于各区域实际情况的采样点。
13.s4: 结合无人机定位模块获取的经纬度和高程数据,储存各采样点精确的空气污染数据;空气质量检测仪器在检测过程中将实时回传pm2.5、pm10等多种污染物浓度,无人机定位模块提供经纬度数据以及海拔数据,将采样点精确的污染浓度数据作为属性存储,经纬度数据和高程数据保存为采样点的三维数据;具体的,s41: 将空气质量检测仪器检测频率为1hz,即每秒回传一次当前空气污染浓度;s42: 实时记录无人机飞行位置的经纬度信息和高程信息;s43: 将无人机的飞行位置信息,作为标签赋予空气污染浓度数据,由此获得空间内高精度的空气污染浓度信息。
14.本发明首先将检测样区根据lcz分区(局部气候分区分类)规则,将检测样区分为17类地区。根据地籍数据和遥感影像结合当地相关政策,对不同lcz分区的飞行高度阈值进行初步规划,建成环境型(built types,lcz 1~10)以楼层高度作为参考指标,上限设置为最高建筑高度向上扩展30米;自然环境型(land cover types,lcz a~g)上限参考建成环境型。其次,对于自然环境型区域,使用规则采样的方法设置均匀分布的采样点;对于建成环境型区域,剔除建筑物后,使用系统采样方法设置采样点。再次,搭载在无人机上的空气质量检测仪器在检测过程中将实时回传pm2.5、pm10等多种污染物浓度,无人机定位模块提供经纬度数据以及海拔数据,最终记录每个采样点的空间坐标(平面和垂直位置),以及属性数据pm2.5、so2和o3等各污物的浓度。
15.本方法可以实现城市街道或者小区级别的三维空间高精度空气污染物浓度的检测,弥补了现有站点检测方案的站点数量分布过少,以及遥感反演获取的结果精度较低的问题,具体可以用来为城市规划和环境保护提供实用的数据支持。
16.以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精
神和原则之内所作的任何修改、等同替换或改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。