1.本发明基于一种用于产生激光雷达系统的光脉冲的方法。
背景技术:
2.激光雷达系统或激光雷达传感器是在通往高度自动化驾驶的路径上的基石。它们主要还用于对象的距离测量并且用于产生激光雷达系统周围的环境地图。在此,您不仅可以提供高的空间分辨率而且可以覆盖大的测量范围,即不仅可以探测近处的对象而且可以探测远处的对象。在此,由对象所反射的光或其由激光雷达系统接收和分析处理的强度起着重要作用。太高的脉冲强度会干扰对反射脉冲的有意义的分析处理并阻止可用的测量值,例如如果探测器饱和。太低的脉冲强度可能使得远处的对象的探测无法实现。
技术实现要素:
3.本发明的优点
4.公开一种用于产生激光雷达系统的光脉冲的方法,该方法具有独立专利权利要求的特征。
5.在此,产生光脉冲序列,该光脉冲序列具有不同强度的至少一个第一光脉冲和至少一个第二光脉冲。这通过光源、尤其是通过激光器来完成。在此,脉冲强度可以例如通过脉冲的峰值幅度来定义,并且脉冲强度可以例如在100倍(尤其是200倍)至500倍的范围内不同。例如,第一和第二脉冲可以具有在1ns到1000ns的范围内的时间间隔,尤其是500ns。
6.如此产生的光脉冲序列是借助激光雷达系统来发射的,并且光脉冲序列的由对象所反射的部分是通过激光雷达系统接收的。
7.光脉冲序列的所接收的部分被分析处理并且可以用于对象的距离测量。
8.该方法是有利的,因为对于该方法而言不必将复杂的充电电路用于光源并且因此确保该方法的简单的可实现性。虽然这里可以借助用于激光源的恒流源来完成补救措施,然而,恒流源具有以下问题:在发生功能故障时会产生显著更多的激光功率,由此眼睛安全的确保成为重大挑战并且高开销的安全机制变得必要。在所公开的方法中,这不是必需的。此外,可以实现对所反射的光脉冲序列进行简单的分析处理,而无需高开销的长滤波器,由此计算开销保持在合理的范畴内。
9.本发明的另外的有利实施方式是从属权利要求的主题。
10.符合目的地,在产生光脉冲序列时,产生具有预先定义的第一强度的第一光脉冲。此外,在产生第一光脉冲之后,产生具有预先定义的第二强度的第二光脉冲。在此,预先定义的第二强度高于预先定义的第一强度。这是有利的,因为通过具有较低强度的第一光脉冲避免激光雷达系统的探测器的饱和。通过以所说明的顺序发射具有强度差异的两个脉冲,避免以下问题:强脉冲的信号落入到弱脉冲的测量窗口中,并且因此不再能够与弱脉冲区分开来,这会歪曲距离测量的分析处理。
11.符合目的地,在光脉冲序列的光脉冲之间分别存在预先定义的第一时间间隔。这
是有利的,因为因此能够分开地分析处理各个光脉冲并且允许最小化计算开销。例如,不需要长滤波器组来分析处理脉冲序列的各个脉冲。此外,足够长的第一时间间隔使得能够实现在接收信号的解释中的唯一明确性,因为弱光脉冲仅具有短的作用距离。在此,弱光脉冲在发射强的光脉冲之前返回探测器。替代地,也能够使用更短的第一时间间隔,其中,在这种情况下,脉冲在分析处理中彼此分开。
12.符合目的地,在分析处理光脉冲序列的接收部分、即反射光时,分析处理接收到的第一光脉冲并且分析处理接收到的第二光脉冲。有利地,这彼此分开地、尤其是依次地在电子控制单元中完成,以便最小化电子控制单元的计算开销和复杂性。然后将光脉冲的分析处理合并,以便扩大激光雷达系统的距离测量范围。这是可能的,因为通过具有较低强度的脉冲尤其覆盖近距离的测量范围并且通过具有较高强度的脉冲覆盖更远的测量范围。在近处的对象的情况下,以与在距离较远的对象的情况下相比更高的强度反射所述光,从而当高强度的脉冲由近处的对象反射时,可能发生激光雷达系统的探测器的饱和。结果,这使得可靠的距离测量不能实现。通过发射低强度的光脉冲,距离的测量在这种情况下也可以可靠地发生,从而通过合并所述分析处理来实现扩展的测量范围。
13.符合目的地,第一光脉冲具有比第二光脉冲更短的脉冲持续时间。这是有利的,因为由此减弱或避免激光雷达系统的探测器的由于所发射的脉冲的内部反射而造成的眩目(blendung)。这尤其是对于spad探测器而言是重要相关的。这使得能够实现短距离的可靠测量。此外,这允许基于由探测器所测量的脉冲持续时间来区分第一脉冲和第二脉冲。
14.符合目的地,在产生光脉冲序列时,将产生光脉冲序列所需的光的一部分耦合输出到光学延迟链中,尤其是借助分束器耦合输出。此外,将已通过光学延迟链延迟的耦合输出的光耦合输入到产生光脉冲序列所需的光的未经耦合输出的部分的光路中。通过耦合输出、延迟和再次耦合输入可以产生具有不同强度的至少两个光脉冲的光脉冲序列。当通过具有恒定脉冲能量的光源或激光源来产生光时,这是尤其有利的。这使得能够通过安装简单的光学元件来实现用于光源或激光源的简单的控制电路。此外,通过分束器可以简单地确定延迟光的脉冲强度。如此,可以以简单的方式预先给定是首先出现高强度的脉冲并且然后出现低强度的脉冲还是相反。也可以通过延迟链的构型来简单地预先给定在所得到的脉冲之间的时间间隔,而无需高开销的电子电路。
15.符合目的地,光学延迟链包括光波导和/或耦合输出的光的自由空间传播。在此,耦合输出的光直至耦合输入为止所需的持续时间大于未经耦合输出的光直到耦合输出的光的耦合输入为止所需的持续时间。这是有利的,因为因此可以简单地确定脉冲之间的时间间隔。
16.符合目的地,将产生光脉冲序列所需的光引入到光学谐振器中,以便产生不同强度的至少两个光脉冲。这是有利的,因为能够以简单的方式实现而无需高开销的电子电路。尤其当在脉冲序列中期望多个脉冲时,光学谐振器是有利的。
17.符合目的地,将产生光脉冲序列所需的光引入到可饱和吸收体中,以便产生不同强度的至少两个光脉冲。在此,将相同强度的脉冲的光脉冲序列引入到光吸收器中。在此,第一脉冲的强度的大部分由吸收器吸收,从而从吸收器出射的第一脉冲具有比跟随第一脉冲的第二脉冲更低的强度,尤其是如果第二脉冲在比光吸收体的弛豫时间(relaxationszeit)更短的时间段内跟随在第一脉冲之后。在此,在吸收体中出现饱和效
应,该饱和效应导致在第二脉冲发生时减少的吸收。
18.符合目的地,可饱和吸收体包括半导体材料和/或磷光材料。这是有利的,因为这些材料具有可饱和的吸收性能,所述可饱和的吸收性能适用于实现上述性能并且适用于实现以几纳秒的间隔的多个脉冲的脉冲强度的相应调制。
19.符合目的地,多次地和/或连续地实施所描述的方法步骤,其中,在发射相应光脉冲序列的步骤之间具有预先定义的第二时间间隔。在此,第二时间间隔大于第一时间间隔,这就是说,在相应的光脉冲序列之间的间隔大于在一个光脉冲序列内的各个脉冲之间的间隔。多次的和/或连续的实施是有利的,因为因此能够检测多个对象及其距离并且在运动的情况下检测到经校正的距离数据。因此存在多个能够分析处理的反射脉冲,由此可以实现良好的测量统计并且防止或减弱距离信号的“跳跃”。此外,在此,该方法的优点特别好地显示出来,尤其是关于激光雷达系统的探测器的可能的饱和性能,因为这通过所描述的方法被避免或被减弱。
20.符合目的地,反射光的接收借助spad探测器、所谓的单光子雪崩二极管探测器进行。这是有利的,因为spad探测器由于其死区时间及其饱和性能而特别大地受益于所描述的方法。由于spad技术附加地在动态范围方面具有问题,因为仅少量spad单元可供用于测量,因此所描述的方法能够有利地用于这种类型的探测器。
21.此外,本公开的主题是一种激光雷达系统,该激光雷达系统包括至少一个装置,所述装置设置由于实施所描述的方法。这样的激光雷达系统包括例如光源、电子控制单元和用于接收反射光的探测器。此外,也可以存在偏转镜或发送/接收光学器件。因此可以实现所提及的优点。
22.此外,本公开的主题是一种计算机程序,该计算机程序包括指令,所述指令实现,所公开的激光雷达系统实施所描述的方法的所有步骤。因此可以实现所提及的优点。
23.此外,本公开的主题是一种机器可读的存储介质,在该机器可读的存储介质上存储有所公开的计算机程序。
附图说明
24.本发明的有利实施方式在附图中示出并且在以下描述中更详细地解释。
25.附图示出:
26.图1示出根据第一实施方式的所公开的方法的流程图;
27.图2示出由根据第一实施方式的所公开的方法得到的光脉冲的示意图;
28.图3示出根据第二实施方式的所公开的方法的流程图;
29.图4示出由根据第二实施方式的所公开的方法得到的光脉冲的示意图;
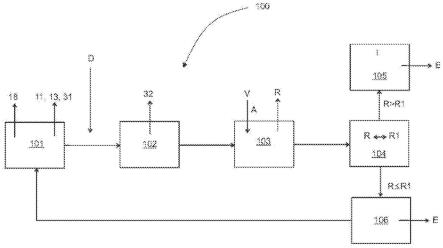
30.图5示出根据第三实施方式的所公开的方法的流程图;
31.图6示出由根据第三实施方式的所公开的方法得到的光脉冲的示意图;
32.图7在直方图中示出用于距离测量的、经分析处理的接收光脉冲序列的示意图;
33.图8示出经分析处理的第一和第二光脉冲的示意图;
34.图9示出具有光学延迟链的激光雷达系统的示意图;
具体实施方式
35.在所有附图中,相同的附图标记表示相同的设备组件或相同的方法步骤。
36.图1示出根据第一实施方式的公开的用于产生激光雷达系统的光脉冲的方法的流程图。在此,在第一步骤s11中,通过激光雷达系统的光源产生光脉冲序列,其中,该光脉冲序列包括至少一个第一光脉冲和第二光脉冲。在此,光脉冲具有不同的强度。
37.在可以与第一步骤s11重叠的第二步骤s12中,通过激光雷达系统将光脉冲序列发射到其周围环境中。
38.在第三步骤s13中,通过激光雷达系统接收光脉冲序列的由对象反射的部分。在此,最初发射的光脉冲序列可以全部或部分地再次被接收,可能以减弱的方式吸收,这取决于光脉冲序列照射到什么上并被反射回来。所述光的接收可以通过激光雷达系统的相应探测器实现。
39.在第四步骤s14中,分析处理光脉冲序列的接收部分,以便由此求取例如对象的距离。
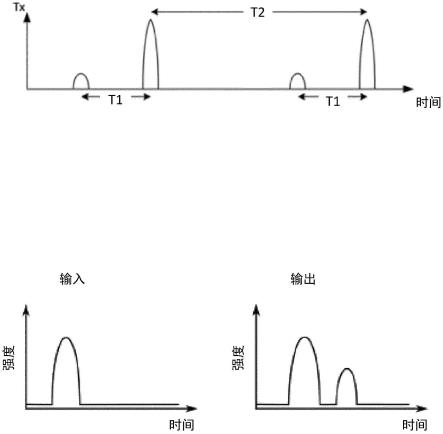
40.图2示出由根据第一实施方式的所公开的方法得到的光脉冲的示意图。在此,在垂直轴tx上绘制相应脉冲的强度,并且在纵向轴time(时间)上绘制时间上的变化过程。光脉冲序列的两个脉冲具有预先定义的第一时间间隔t1并且相应光脉冲序列具有预先定义的第二时间间隔t2。例如,预先定义的时间间隔t2可以在1μs至10μs的范围内,尤其是2μs。
41.图3示出根据第二实施方式的用于产生激光雷达系统的光脉冲的所公开的方法的流程图。在此,在第一步骤s31中,通过激光雷达系统的光源产生光脉冲序列,其中,该光脉冲序列包括至少一个光脉冲。光源产生具有相同强度的光脉冲。因此,可以更加简单且更加成本有利地构建光源。
42.在第二步骤s32中,将产生光脉冲序列所需的光的一部分耦合输出到光学延迟链中。为此,例如可以为此使用分束器。由此可以确定得到的脉冲的强度。
43.在第三步骤s33中,将已通过光学延迟链延迟的耦合输出的光再次耦合输入到未经耦合输出的光中,以便产生具有不同强度的至少两个脉冲的光脉冲序列。
44.在可以与上述步骤重叠的第四步骤s34中,通过激光雷达系统将如此产生的光脉冲序列发射到其周围环境中。
45.在第五步骤s35中,通过激光雷达系统接收光脉冲序列的由对象反射的部分。在此,最初发射的光脉冲序列可以全部或部分地再次被接收,可能以减弱的方式,这取决于光脉冲序列照射到什么上并被反射回来。所述光的接收可以通过激光雷达系统的相应探测器实现。
46.在第六步骤s36中,分析处理光脉冲序列的接收部分,以便由此求取例如对象的距离。
47.图4示出由根据第二实施方式的所公开的方法产生的光脉冲的示意图。在此,在垂直轴intensity(强度)上绘制相应脉冲的强度,并且在纵向轴time(时间)上绘制时间上的变化过程。在左图中示出光脉冲,如其由光源产生的那样。该光脉冲具有预先定义的强度。右边示出在经历光学延迟链之后产生的光脉冲。在此,时间间隔和所示出的强度仅是示意性的:在左图中的脉冲导致在右图中所示出的具有预先定义的第一和第二强度的两个脉冲。
48.图5示出根据第三实施方式的用于产生激光雷达系统的光脉冲的所公开的方法的流程图。在此,在第一步骤s51中,通过激光雷达系统的光源产生光脉冲序列,其中,该光脉冲序列包括至少一个第一光脉冲和第二光脉冲。光源产生具有相同强度的光脉冲。因此可以更加简单且更加成本有利地构建光源。
49.在第二步骤s52中,将在第一步骤s51中得到的光脉冲序列引入到可饱和吸收体中。通过可饱和吸收体吸收第一光脉冲的大部分,从而所传输的第一光脉冲具有较低的强度。这也导致吸收体或吸收体材料的饱和效应,这在一定时间内降低其吸收能力,直到再次发生弛豫到非激发状态中。在第一光脉冲之后的、在比吸收体的所提及的弛豫时间更短的时间段内跟随的第二光脉冲因此以更小的部分被吸收,从而所传输的第二光脉冲具有比所传输的第一光脉冲更高的强度。
50.在可以与第一步骤s51重叠的第三步骤s53中,通过激光雷达系统将如此产生的光脉冲序列发射到其周围环境中。
51.在第四步骤s54中,通过激光雷达系统接收光脉冲序列的由对象反射的部分。在此,最初发射的光脉冲序列可以全部或部分地再次被接收,可能以减弱的方式,这取决于光脉冲序列照射到什么上并被反射回来。所述光的接收可以通过激光雷达系统的相应探测器实现。
52.在第五步骤s55中,分析处理光脉冲序列的接收部分,以便由此求取例如对象的距离。
53.图6示出由根据第二实施方式的所公开的方法产生的光脉冲的示意图。在此,在垂直轴intensity上绘制相应脉冲的强度,并且在纵向轴time上绘制时间上的变化过程。在左图中示范性示出两个光脉冲,如其由光源产生的那样。它们具有预先定义的强度。右边示出在经历光吸收器之后产生的光脉冲。在此,时间间隔和所示出的强度仅是示意性的:在左图中的两个脉冲导致在右图中所示出的具有预先定义的第一和第二强度的两个脉冲。
54.图7在直方图中示出用于距离测量的、经分析处理的接收光脉冲序列的示意图。在此,直方图在纵向轴bin上具有不同的类别,所述类别表示对象至激光雷达系统的不同距离。此外还画出极限值线thr,所述极限值线表示,从怎样的强度极限值起将对象视作存在。垂直轴i代表强度。通过强度71、72、73所代表的对象因此由激光雷达系统探测到,而通过强度74所代表的对象没有被探测到,因为该对象处于弱脉冲的最大作用距离之外。
55.图8示出根据本公开的经分析处理的反射光脉冲序列的示意图。在此,在垂直轴i上绘制反射脉冲的相应强度,并且在纵向轴上绘制用于距离的特征数。直到一定的距离特征数d1为止,对于具有高强度的脉冲的经分析处理的强度曲线平行于垂直轴i延伸。然后,在点83中出现折点。这意味着,直到这个距离为止,来自近距离范围地,不存在可靠的距离信息与强度信息,因为所反射的接收脉冲具有太高的强度。这导致所反射的脉冲的接收器的饱和,其中,尤其在spad探测器中出现饱和性能。从距离特征数d1或点83起,强度曲线在示意图中线性地延伸,这里以81表示。在此,曲线的具体外观在这里不重要,而是主要是以下事实:在距离与强度之间存在线性的或可能非线性的单射关系。然后可以通过所述关系来由接收到的脉冲强度逆计算出距离。因此,对于直到点83或者说距离d1为止的近距离范围,还不存在可靠的距离信息。
56.由对具有低强度的脉冲的分析处理得到强度曲线82,其中,在这种情况下在距离
与强度之间也存在线性的或可能非线性的单射关系。这适用于直到距离d1为止,由此可以直到距离d1为止地可靠地确定对象的距离。如果现在将具有高强度脉冲的强度曲线81与具有低强度脉冲的强度曲线82合并,则可以针对整个测量范围实现对于对象的可靠的距离测量与强度测量,而接收器的电学性能不会限制性地起作用。
57.图9示出具有光学延迟链92的激光雷达系统90的示意图。在此,延迟链92包括用于耦合输入和耦合输出光束93的一部分的两个分束器,由此可以由具有预先定义强度的一个脉冲产生具有预先定义的第一强度和预先定义的第二强度的两个脉冲。在此,光束由光源91产生并通过合适的装置——在此没有示出——例如相应的光学器件发射到激光雷达系统的周围环境中。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。