1.本发明涉及精密工程测量技术领域,特别是涉及一种解决卫星基线解算尺度和全站仪测距尺度不一致的方法。
背景技术:
2.施工控制网是工程建设的控制基准,被形象的称为工程建设的“龙脉”、“骨架”,是工程项目区域施工放样、金结安装及变形监测等的起算数据,在工程建设中起着至关重要的作用。卫星基线边长的解算精度决定了平面坐标解算精度,进而影响施工控制网等级,若施工控制网等级低、精度差,则会影响测量现场作业精度,从而影响工程施工质量。
3.经调研,大多工程控制网建设数据处理过程中,卫星基线解算软件在数据解算过程中存在部分卫星基线边长最弱边相对中误差超限,但卫星基线软件解算出来的坐标平差结果指标却满足规范对应等级要求。在实际工作中,对于个别卫星基线长度精度超标问题并未采取一定的技术手段进行消除或减小就直接利用软件求取出来的坐标值进行施工作业。因此,有必要探究一种解决卫星基线解算尺度和全站仪测距尺度不一致的方法,消除或减小该误差,才能做到消除测量事故隐患,为施工安全、工程质量保驾护航,对工程测量尤其精密工程测量具有重要意义。
技术实现要素:
4.本发明的目的是为了克服上述背景技术的不足,提供一种解决卫星基线解算尺度和全站仪测距尺度不一致的方法,该方法适用于精密施工测量利用卫星基线解算平面坐标的相关作业,可确保用于坐标解算的卫星基线尺度和全站仪测距尺度的一致,即在一定误差范围内,满足精密施工测量技术要求,进而提高平面坐标解算精度。
5.为了实现上述的技术特征,本发明的目的是这样实现的:一种解决卫星基线解算尺度和全站仪测距尺度不一致的方法,包括以下步骤:
6.步骤一:获取测区范围内已知点位信息和卫星原始观测数据,构建卫星基线向量;
7.步骤二:依据测区范围内各控制点精密高程坐标信息、卫星基线长信息,求取控制点间平距;
8.步骤三:建立卫星基线边长与控制点平距、控制点与投影面之间的高差以及卫星原始观测数据坐标系统参数之间的改化模型;
9.步骤四:利用卫星原始观测数据和控制点精密高程值,对各个模型参数进行计算,得到卫星基线边长改化公式的具体形式,计算得到卫星基线改化后边长l。
10.步骤五:利用精密全站仪检查控制点间距离并和改化后卫星基线边长做对比,进行尺度验证。
11.所述步骤二中以控制点a和b两点为例,计算控制点间平距具体过程为:
[0012][0013]
h1=h
b-haꢀꢀꢀ
(2)
[0014]
式中,v为控制点间平距,单位为m;l1为卫星观测基线长,单位为m;h1为控制点间高差,单位为m;ha,hb分别为a、b两点正常高程值,单位为m。
[0015]
所述步骤三中改化模型为:
[0016][0017][0018]
式中,l为卫星基线边长改化后的数值,单位为m;v为控制点间平距,单位为m;δh为控制点与投影面之间的高差,单位为m;ha,hb分别为a、b两点正常高程值,单位为m,hm为测区平均高程面正常高程值,单位为m;a为地球平均曲率半径,单位为m。
[0019]
本发明有如下有益效果:
[0020]
本发明所述方法适用性强、精度可靠、经长期验证,可大幅提高利用卫星基线边长进行平面坐标解算的精度,进而有效提升施工控制网的精度,在精密施工测量中具有较高实用价值。
附图说明
[0021]
下面结合附图和实施例对本发明作进一步说明。
[0022]
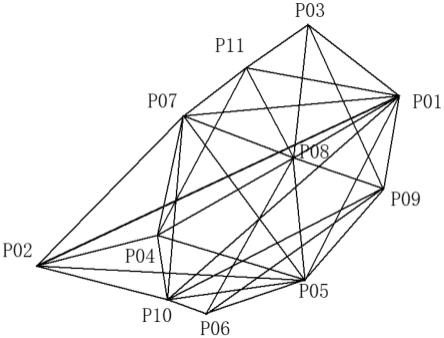
图1为测区施工控制网布设图。
[0023]
图2为测区施工控制网局部图。
具体实施方式
[0024]
下面结合附图对本发明的实施方式做进一步的说明。
[0025]
实施例1:
[0026]
一种解决卫星基线解算尺度和全站仪测距尺度不一致的方法,包括以下步骤:
[0027]
步骤一:获取测区范围内已知点位信息和卫星原始观测数据,构建卫星基线向量;
[0028]
步骤二:依据测区范围内各控制点精密高程坐标信息、卫星基线长信息,求取控制点间平距;以控制点a和b两点为例,计算控制点间平距具体过程为:
[0029][0030]
h1=h
b-haꢀꢀꢀ
(2)
[0031]
式中,v为控制点间平距,单位为m;l1为卫星观测基线长,单位为m;h1为控制点间高差,单位为m;ha,hb分别为a、b两点正常高程值,单位为m。
[0032]
步骤三:建立卫星基线边长与控制点平距、控制点与投影面之间的高差以及卫星原始观测数据坐标系统参数之间的改化模型;
[0033][0034][0035]
式中,l为卫星基线边长改化后的数值,单位为m;v为控制点间平距,单位为m;δh为控制点与投影面之间的高差,单位为m;ha,hb分别为a、b两点正常高程值,单位为m,hm为测
区平均高程面正常高程值,单位为m;a为地球平均曲率半径,单位为m。
[0036]
步骤四:利用卫星原始观测数据和控制点精密高程值,对各个模型参数进行计算,得到卫星基线边长改化公式的具体形式,计算得到卫星基线改化后边长l。
[0037]
步骤五:利用精密全站仪检查控制点间距离并和改化后卫星基线边长做对比,进行尺度验证。
[0038]
实施例2:
[0039]
图1为某次实际工程施工控制网布设图,利用gps接收机获取站点数据,结合卫星基线边长解算过程,参见图2,以p01-p08、p01-p11以及p03-p11三条基线为例,对本发明做进一步详细阐述。
[0040]
步骤一,在该次测量中,控制点分布如图1所示,其中p01和p02为已知点,p03~p11为坐标信息未知的控制点;
[0041]
步骤二,依据卫星观测基线长、高差信息等,计算测区控制网中p01-p08、p01-p11以及p03-p11三条卫星基线平距,结果如下:
[0042]
表1控制点平距成果表
[0043][0044]
说明:p01高程572.2482m;p08高程509.6691m,p11高程475.2554m,p03高程579.5355m。
[0045]
步骤三,建立卫星基线边长与控制点平距、控制点与投影面之间的高差以及卫星原始观测数据坐标系统参数之间的改正模型,如公式(3)所示;
[0046]
步骤四,将改成模型参数输入公式(3)中,进行解算,gps使用的是wgs84坐标系统,故公式(3)中地球平均曲率半径a取值6371000m。
[0047]
步骤五,将步骤三中得到的参数代入公式(4)中,求取改化后卫星基线边长,结果如表2所示:
[0048]
表2卫星基线边长改化成果表
[0049][0050]
说明:投影面为470m;p01高程572.2482m;p08高程509.6691m,p11高程475.2554m,p03高程579.5355m。
[0051]
步骤六,利用精密全站仪观测p01-p08、p01-p11以及p03-p11三条基线边长,并将其投影到和卫星基线边长同一投影面上,并将其分别与改化前、改化后卫星边长做对比,进行尺度分析,如表3所示;
[0052]
表3全站仪观测边长与卫星基线投影改化前后边长对比表
[0053][0054][0055]
说明:表中全站仪边长和卫星基线边长使用同一改化高程面470m。
[0056]
结论:
[0057]
以精密全站仪测取的边长为基准,计算改化后卫星解算基线边长与基准值之间偏差,进行精度检验,从表3可知,改化后卫星基线边长和全站仪实测边长平距偏差大幅降低,在一定误差范围内,有效保证了卫星基线边长和全站仪实测尺度的一致性,确保了精密施工质量精准可靠。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。
