1.本技术属于半实物仿真技术领域,特别涉及一种有无人机编队协同对抗仿真试验平台及试验方法。
背景技术:
2.有人/无人机协同对抗系统,是集多源异构数据融合、跨平台协同传感器管理、协同战术决策、协同航路规划、协同飞行控制和协同火力打击等功能于一体的复杂系统。有人/无人机协同对抗系统研发与验证的核心环节是试验,需要在不同任务场景、对抗对象、突发威胁、天气和电磁环境等因素下,测试有人/无人机的自主协同对态势的感知能力、识别能力,任务系统的判断能力和决策能力,执行系统的控制能力与执行能力,以求得到更为完善的协同感知、协同决策和协同控制技术。
3.有人/无人机编队协同对抗仿真试验平台则着重模拟有人/无人机协同对抗系统在实际任务场景中遇到的各种各样的复杂真实场景,同时可用于验证和试验协同智能控制的软件算法的正确性,新质功能组件在实装环境下运行的实时性与可靠性。传统机载系统地面试验技术包括试飞试验、地面实物试验和虚拟仿真试验三种方式。试飞试验和地面实物试验验证协同智能控制风险高、成本大、效率低,试验资源难以实现各种不同场景的模拟,还面临着试验条件不可控可能造成的安全问题。虚拟仿真试验成本低、效率高且能够模拟各种任务场景,但难以验证在实装环境下运行的可行性。
4.因此,需要研究虚实结合的试验方法,融合虚拟测试、实物试验各自的优势。
技术实现要素:
5.本技术的目的是提供了一种有无人机编队协同对抗仿真试验平台及试验方法,以解决现有技术中难以同时兼顾实物试验和虚拟仿真试验的优点的问题。
6.本技术的技术方案是:一种有无人机编队协同对抗仿真试验平台,包括:异构平台半实物模拟系统,用于模拟有人/无人机的所有协同对抗试验场景,并实时生成试验场景的半实物或仿真数据;协同对抗实时仿真系统,用于根据异构平台半实物模拟系统的实时数据生成数字孪生协同对抗场景;协同智能控制系统,用于根据异构平台半实物模拟系统生成的数据控制有人/无人机;编队协同对抗仿真总控系统,用于对异构平台半实物模拟系统、协同对抗实时仿真系统和协同智能控制系统发布总体布局和进行总体协调控制;所述编队协同对抗仿真总控系统分别向异构平台半实物模拟系统、协同对抗实时仿真系统和协同智能控制系统发出总体布局指令,协同对抗实时仿真场景根据总体布局指令布设试验所需的仿真场景,协同智能控制系统根据总体布局指令输出有人/无人机的具体任务指令至异构平台半物理模拟系统,异构平台半物理模拟系统根据具体的总体布局指令输出有人/无人机的数字或半实物仿真数据至协同对抗实时仿真系统内,使得协同对抗实时仿真系统内的有人/无人机执行该任务,异构平台半物理模拟系统实时采集有人/无人机执行任务时的数据信息并上传至协同智能控制系统内,协同智能控制系统根据反馈的信息确定有人/
无人机下一步的任务指令。
7.优选地,还包括视景仿真系统,所述视景仿真系统用于从协同对抗实时仿真系统内接收仿真和实物数据,生成仿真画面。
8.优选地,所述视景仿真系统包括模型搭建模块、仿真画面生成模块和配置界面搭建模块;所述模型搭建模块用于搭建有人/无人机三维几何模型与地形场景模型,所述仿真画面生成模块用于利用应用程序变成接口函数并调用搭建完成的模型生成仿真画面,所述配置界面搭建模块用于利用工程搭建配置界面,对仿真场景的启动、关闭以及初始状态进行管理与控制。
9.优选地,所述协同对抗仿真总控系统包括兵力仿真部署模块、试验任务规划模块、试验进程控制模块和系统时间同步模块;所述兵力仿真部署模块用于根据试验要求生成敌我兵力配置和兵力部署,所述试验任务规划模块用于进行试验任务场景规划和试验任务部署;所述试验进程控制模块用于实时获取异构平台半实物模拟系统、协同对抗实时仿真系统和协同智能控制系统的试验进程并根据当前试验进程确定试验的下一动作;所述系统时间同步模块用于将系统时间同步广播至异构平台半实物模拟系统、协同对抗实时仿真系统和协同智能控制系统中,保证各系统的时间同步。
10.优选地,所述试验任务场景规划包括地理信息、大气环境信息、电磁环境信息、任务区域、任务目标与有人/无人机平台属性、初始位置、任务航线和指控关系信息。
11.优选地,所述协同对抗实时仿真系统包括任务场景和激励模型,所述任务场景用于验证协同智能控制系统对任务、编队、态势等信息的识别和处理的能力,所述激励模型用于验证协同智能控制系统处理突发威胁、链路故障等突发事件的能力。
12.优选地,所述任务场景包括模拟有人/无人机模型、地理模型、海洋模型和天气模型;所述激励模型包括突发空中、地面威胁目标模型和电磁模型。
13.优选地,所述异构平台半物理模拟系统包括半实物模拟系统和数据仿真系统,所述半实物模拟系统包括飞行控制系统、嵌入式任务处理系统、雷达模拟系统、光电模拟系统、电子战模拟系统、数据链模拟系统、发射物模拟系统,用于实装条件下的无人机系统功能运行的模拟与试验;所述数字仿真模拟系统包括飞行控制模型、虚拟任务处理、虚拟雷达、虚拟光电、虚拟电子战、虚拟数据链、虚拟发射物、虚拟座舱与人机交互界面。
14.优选地,所述协同智能控制系统包括协同感知单元、协同决策单元和协同控制单元,协同感知单元用于多源异构传感器信息数据融合与编队传感器的协同管理,协同决策单元接收协同感知单元处理后的信息并做出战术控制决策策略,协同控制单元根据控制协同决策策略给出相应传感器控制、飞行控制、发射物总体布局指令发送给异构平台半物理模拟系统。
15.作为一种具体实施方式,一种有无人机编队协同对抗仿真试验方法,包括:编队协同对抗仿真总控系统、协同智能控制系统通过本平台提供的api接入系统,通过编队协同对抗仿真总控系统进行协同对抗试验任务场景中敌我兵力配置、兵力部署、任务目标、初始航线、任务区域规划,根据需求在有人/无人机异构平台半实物模拟系统中设置平台飞行控制模型参数、传感器配置与系统参数以及发射物配置与系统参数;协同对抗实时仿真系统从半实物仿真系统和数字仿真系统生成测试所需的虚拟协同对抗场景,并载入异构平台半实物模拟系统生成有人/无人机平台;视景仿真系统根据协同对抗实时仿真系统的数据建立
战场三维仿真场景;各平台虚拟传感器从虚拟协同对抗场景中采集战场态势信息,并由协同智能控制系统中的感知单元融合处理不同传感器的信息,并对异构平台传感器进行协同管理与控制;协同智能控制系统的决策单元根据各平台的自身位置、姿态、速度、航向以及任务目标、传感器状态、数据链路状态、发射物状态,结合感知单元处理好的战场态势信息得到突发威胁信息,做作出协同战术决策;协同智能控制系统的控制单元根据协同战术决策,生成有人/无人机平台协同飞行控制、协同对抗干扰、协同活力打击总体布局指令,控制有人/无人机的战术任务执行,并采集当前时刻各平台的飞行参数、状态信息;异构平台半实物模拟系统根据总体布局指令解算出有人/无人平台下一时刻的任务目标、飞行航线、传感器工作参数、发射物状态等平台工作参数,并发送至协同对抗实时仿真系统;协同对抗实时仿真系统根据异构平台半实物模拟系统的反馈更新协同对抗场景;视景仿真系统更新三维仿真场景并显示,重复生成虚拟协同对抗场景和有人/无人机平台,进行协同对抗;协同对抗实时仿真系统生成有人/无人机协同对抗试验结果过程文件,分析协同智能控制系统的协同战术决策与协同控制是否满足要求,若是,则试验结束。
16.本技术的一种有无人机编队协同对抗仿真试验平台,通过异构平台半实物模拟系统实时生成试验场景的半实物或仿真数据,通过协同对抗实时仿真系统生成数字孪生协同对抗场景,通过协同智能控制系统根据异构平台半实物模拟系统生成的数据控制有人/无人机,通过编队协同对抗仿真总控系统各系统发布总体决策和进行总体协调控制;将半实物或仿真数据输入至协同对抗实时仿真系统内,半实物信号通过采集实物数据获得,能够保证试验的可行性,仿真信号通过采集模型信号获得,能够保证试验的效率,保证了试验的有效性与机载应用的可行性,缩短了试验周期,降低了试验的风险与成本。
附图说明
17.为了更清楚地说明本技术提供的技术方案,下面将对附图作简单地介绍。显而易见地,下面描述的附图仅仅是本技术的一些实施例。
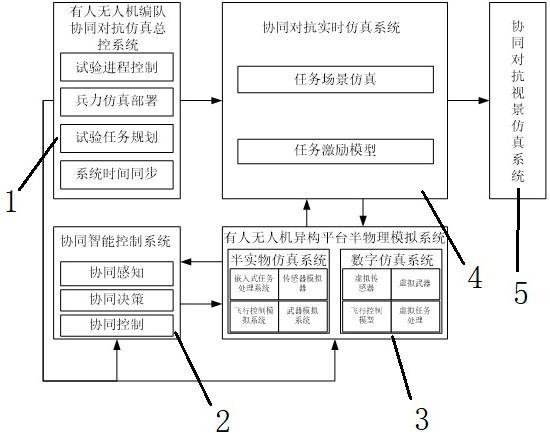
18.图1为本技术整体结构示意图。
19.1、编队协同对抗仿真总控系统;2、协同智能控制系统;3、异构平台半实物模拟系统;4、协同对抗实时仿真系统;5、视景仿真系统。
具体实施方式
20.为使本技术实施的目的、技术方案和优点更加清楚,下面将结合本技术实施例中的附图,对本技术实施例中的技术方案进行更加详细的描述。
21.一种有无人编队协同对抗仿真试验平台,通过半实物模拟系统与数字仿真系统结合,提供虚实结合的有人/无人机协同对抗仿真环境,检具实物试验的可行性和虚拟试验的高效性的优点。
22.包括异构平台半实物模拟系统3、协同对抗仿真系统、协同智能控制系统2和编队协同对抗仿真总控系统1。
23.异构平台半实物模拟系统3用于模拟有人/无人机的所有协同对抗试验场景,并实时生成试验场景的半实物或仿真数据;协同对抗实时仿真系统4用于根据异构平台半实物模拟系统3的实时数据生成数字孪生协同对抗场景;协同智能控制系统2用于根据异构平台
半实物模拟系统3生成的数据控制有人/无人机;编队协同对抗仿真总控系统1用于对异构平台半实物模拟系统3、协同对抗实时仿真系统4和协同智能控制系统2发布总体布局和进行总体协调控制。
24.编队协同对抗仿真总控系统1分别向异构平台半实物模拟系统3、协同对抗实时仿真系统4和协同智能控制系统2发出总体布局指令,如敌我双方的兵力数据、仿真对抗开始时间、试验任务选择等,协同对抗实时仿真场景根据总体布局指令布设试验所需的仿真场景,协同智能控制系统2根据总体布局指令输出有人/无人机的具体任务指令至异构平台半物理模拟系统,异构平台半物理模拟系统根据具体的总体布局指令输出有人/无人机的数字或半实物仿真数据至协同对抗实时仿真系统4内,使得协同对抗实时仿真系统4内的有人/无人机执行该任务,异构平台半物理模拟系统实时采集有人/无人机执行任务时的数据信息并上传至协同智能控制系统2内,协同智能控制系统2根据反馈的信息确定有人/无人机下一步的任务指令。
25.本技术通过同时设计异构平台半实物模拟系统3,将半实物或仿真数据输入至协同对抗实时仿真系统4内,半实物信号通过采集实物数据获得,能够保证试验的可行性,仿真信号通过采集模型信号获得,能够保证试验的效率,保证了试验的有效性与机载应用的可行性,缩短了试验周期,降低了试验的风险与成本。
26.优选地,还包括视景仿真系统5,视景仿真系统5用于从协同对抗实时仿真系统4内接收仿真和实物数据,生成仿真画面。通过视景仿真系统5工作人员能够实时观察协同对抗场景。
27.优选地,视景仿真系统5包括模型搭建模块、仿真画面生成模块和配置界面搭建模块;模型搭建模块用于利用ue4等软件搭建有人/无人机三维几何模型与地形场景模型,仿真画面生成模块用于利用api(application programming interface),应用程序编程接口函数调用以搭建好的模型生成仿真画面,配置界面搭建模块用于利用qt工程搭建配置界面,对仿真场景的启动、关闭以及初始状态进行管理与控制。三个模块各司其职,生成或控制实时仿真所需的模型或画面。
28.优选地,协同对抗仿真总控系统包括兵力仿真部署模块、试验任务规划模块、试验进程控制模块和系统时间同步模块;兵力仿真部署模块用于根据试验要求生成敌我兵力配置和兵力部署,试验任务规划模块用于进行试验任务场景规划和试验任务部署;试验进程控制模块用于实时获取异构平台半实物模拟系统3、协同对抗实时仿真系统4和协同智能控制系统2的试验进程并根据当前试验进程确定试验的下一动作,包括任务的开始、中止、暂停和结束等命令;系统时间同步模块用于将系统时间同步广播至异构平台半实物模拟系统3、协同对抗实时仿真系统4和协同智能控制系统2中,保证各系统的时间同步。
29.优选地,试验任务场景规划包括地理信息、大气环境信息、电磁环境信息、任务区域、任务目标与有人/无人机平台属性、初始位置、任务航线和指控关系信息。
30.优选地,协同对抗实时仿真系统4包括任务场景和激励模型,所述任务场景用于验证协同智能控制系统2对任务、编队、态势等信息的识别和处理的能力,激励模型用于验证协同智能控制系统2处理突发威胁、链路故障等突发事件的能力。同时内部设置有仿真传感器模块,用于实时监测协同对抗进程,并将监测数据通过异构平台半物理模拟系统发送至协同智能控制系统2内,协同智能控制系统2根据传感器的监测数据生成下一步的任务决
策。
31.优选地,任务场景包括模拟有人/无人机模型、地理模型、海洋模型和天气模型;激励模型包括突发空中、地面威胁目标模型和电磁模型。
32.优选地,异构平台半物理模拟系统包括半实物模拟系统和数据仿真系统,半实物模拟系统包括飞行控制系统、嵌入式任务处理系统、雷达模拟系统、光电模拟系统、电子战模拟系统、数据链模拟系统、发射物模拟系统,用于实装条件下的无人机系统功能运行的模拟与试验;传感器模拟系统包括;嵌入式任务处理系统接收任务总体布局指令,并将解算的战场态势信息、编队状态信息、飞行状态信息发送给协同智能控制系统2;数字仿真模拟系统包括飞行控制模型、虚拟任务处理、虚拟雷达、虚拟光电、虚拟电子战、虚拟数据链、虚拟发射物、虚拟座舱与人机交互界面。由于半实物仿真系统与数据仿真系统两者为不同的系统,采用常规的方法难以实现时间同步,通过系统时间同步模块将时间同步广播至半实物仿真系统和数据仿真系统内,能够有效保证半实物仿真系统与数据仿真系统的时间同步。数据仿真系统或半实物仿真系统生成协同对抗监测所需的仿真传感器。
33.优选地,协同智能控制系统2包括协同感知单元、协同决策单元和协同控制单元,协同感知单元用于多源异构传感器信息数据融合与编队传感器的协同管理,协同决策单元接收协同感知单元处理后的信息并做出战术控制决策策略,如巡航、攻击目标区域等命令,协同控制单元根据控制协同决策策略给出相应传感器控制、飞行控制、发射物总体布局指令发送给异构平台半物理模拟系统。
34.具有如下优点:1、通过虚拟数值仿真与半实物仿真相结合替代了传统半实物试验平台,保证了试验的有效性与机载应用的可行性,缩短了试验周期,降低了试验的风险与成本。
35.2、试验任务场景信息可通过真实试飞信息驱动,弥补了虚拟场景不够真实的缺点,结合半实物试验平台,保证了测试的实用性和多样性,验证了协同智能算法实装应用的可靠性。
36.3、虚实结合测试可长时间不间断运行,大大提高了测试速度,节省了人力与物力成本。
37.作为一种具体实施方式,还包括一种有无人机编队协同对抗仿真试验方法,包括:步骤s100,编队协同对抗仿真总控系统1、协同智能控制系统2通过本平台提供的api接入系统,通过编队协同对抗仿真总控系统1进行协同对抗试验任务场景中敌我兵力配置、兵力部署、任务目标、初始航线、任务区域规划,根据需求在有人/无人机异构平台半实物模拟系统3中设置平台飞行控制模型参数、传感器配置与系统参数以及发射物配置与系统参数;步骤s200,协同对抗实时仿真系统4从半实物仿真系统和数字仿真系统生成测试所需的虚拟协同对抗场景,并载入异构平台半实物模拟系统3生成有人/无人机平台;步骤s300,视景仿真系统5根据协同对抗实时仿真系统4的数据建立战场三维仿真场景;步骤s400,各平台虚拟传感器从虚拟协同对抗场景中采集战场态势信息,并由协同智能控制系统2中的感知单元融合处理不同传感器的信息,并对异构平台传感器进行协同管理与控制;
步骤s500,协同智能控制系统2的决策单元根据各平台的自身位置、姿态、速度、航向以及任务目标、传感器状态、数据链路状态、发射物状态,结合感知单元处理好的战场态势信息得到突发威胁信息,做作出协同战术决策;步骤s600,协同智能控制系统2的控制单元根据协同战术决策,生成有人/无人机平台协同飞行控制、协同对抗干扰、协同活力打击总体布局指令,控制有人/无人机的战术任务执行,并采集当前时刻各平台的飞行参数、状态信息;步骤s700,异构平台半实物模拟系统3根据总体布局指令解算出有人/无人平台下一时刻的任务目标、飞行航线、传感器工作参数、发射物状态等平台工作参数,并发送至协同对抗实时仿真系统4;步骤s800,协同对抗实时仿真系统4根据异构平台半实物模拟系统3的反馈更新协同对抗场景;步骤s900,视景仿真系统5更新三维仿真场景并显示,重复步骤s200-s900,进行协同对抗;步骤s1000,协同对抗实时仿真系统4生成有人/无人机协同对抗试验结果过程文件,分析协同智能控制系统2的协同战术决策与协同控制是否满足要求,若是,则试验结束。
38.以上所述,仅为本技术的具体实施方式,但本技术的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本技术揭露的技术范围内,可轻易想到的变化或替换,都应涵盖在本技术的保护范围之内。因此,本技术的保护范围应以所述权利要求的保护范围为准。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。