1.本发明属于工件加工生产线技术领域,具体涉及工件返修上料输送机构。
背景技术:
2.现有的工件加工生产线一般包括依次衔接的上料机构、工件加工输送机构和下料机构,工件从上料机构上料后,通过在工件加工输送机构进行多道工序的加工,完成工艺加工后,工件一般由下料机构输出下料。为了保证工件加工生产线的加工成品率,一般在工件加工输送机构下游设置工件抽检收集机构,以固定频率抽取完成加工的工件,经工件抽检收集机构运送至指定位置进行人工抽检。人工对抽检工件完成检验后,若发现抽检工件存在需要返修加工,则将该工件放置工返修上料输送机构,通过工返修上料输送机构将工件输送加工输送机构进行返修加工,然而,现有的工返修上料输送机构,仅仅是具有单一的输送功能,并不具有在输送过程的阻挡工作,容易导致前一个工件停留在输送方向末端未被机械手取走时,后一个输送的工件与前一个工件发生硬性碰撞,对工件造成损耗,硬性工件出品品质。
3.可见,现有技术还有待改进和提高。
技术实现要素:
4.鉴于上述现有技术的不足之处,本发明的目的在于克服现有技术的不足,提供一种具有输送过程阻挡功能的工返修上料输送机构。
5.为了达到上述目的,本发明采取了以下技术方案:
6.工件返修上料输送机构,包括输送平台、限位组件、举升机构和阻挡机构;限位组件设于所述输送平台沿输送方向的末端,用于将工件限位在输送平台上的预设位置;举升机构用于将限位在限位组件的工件举升至预设高度;阻挡机构设于输送平台的侧部,包括驱动器、连杆机构、第一阻挡臂和第二阻挡臂,所述第一阻挡臂设于第二阻挡臂沿输送平台输送方向的前侧,所述第一阻挡臂和第二阻挡臂分别与连杆机构传动连接;连杆机构在传动第一阻挡臂相对伸出时,同时联动所述第二阻挡臂相对收回;连杆机构在传动第一阻挡臂相对收回时,同时联动所述第二阻挡臂相对伸出。
7.有益效果:与现有技术相比,本发明的工件返修上料输送机构,通过在输送平台的输送过程中设置阻挡机构,并且阻挡机构的第一阻挡臂收回释放工件运输时,第二阻挡臂同时伸出形成阻挡,较好地避免连续两个工件同时运送至限位组件时发生碰撞造成损耗,保证工件运输可靠性。
附图说明
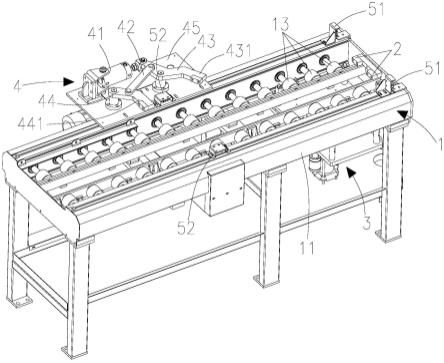
8.图1为工件返修上料输送机构的示意图一。
9.图2为工件返修上料输送机构的示意图二。
10.图3为阻挡机构的示意图。
11.图4为举升机构的示意图。
具体实施方式
12.本发明提供工件返修上料输送机构,为使本发明的目的、技术方案及效果更加清楚、明确,以下参照附图并举实施例对本发明进一步详细说明。应当理解,此处所描述的具体实施例仅用以解释本发明,并不用于限定本发明的保护范围。
13.参见图1至图4,本发明的工件返修上料输送机构,包括输送平台1、限位组件2、举升机构3和阻挡机构4;限位组件2设于所述输送平台1沿输送方向的末端,用于将工件限位在输送平台1上的预设位置;举升机构3用于将限位在限位组件2的工件举升至预设高度;阻挡机构4设于输送平台1输送过程中的侧部,其包括驱动器41、连杆机构42、第一阻挡臂43和第二阻挡臂44,所述第一阻挡臂43设于第二阻挡臂44沿输送平台1输送方向的前侧,所述第一阻挡臂43和第二阻挡臂44分别与连杆机构42传动连接;连杆机构42在传动第一阻挡臂43相对伸出时,同时联动所述第二阻挡臂44相对收回;连杆机构42在传动第一阻挡臂43相对收回时,同时联动所述第二阻挡臂44相对伸出。
14.在实际应用中,本发明提供的工件返修上料输送机构可以应用于数控机床对发动机缸体的精加工生产线,通过机械手抓取工件并放入数控机床中进行精加工,即工件返修上料输送机构用于输送需要返修的发动机缸体。
15.与现有技术相比,本发明的工件返修上料输送机构,通过在输送平台1的输送过程中设置阻挡机构4,并且阻挡机构4的第一阻挡臂43收回释放工件运输时,第二阻挡臂44同时伸出形成阻挡,较好地避免连续两个工件同时运送至限位组件2时发生碰撞造成损耗,保证工件运输可靠性。
16.参见图1至图3,在一种实施例中,所述第一阻挡臂43和第二阻挡臂44分别沿输送平台1输送方向一侧旋转实现相对收回,沿输送平台1输送方向另一侧旋转实现相对伸出;通过这样设置,第一阻挡臂43和第二阻挡臂44收回旋转方向可以避免与工件发生碰撞。
17.在一种实施例中,所述第一阻挡臂43与第二阻挡臂44的间距为大于一个工件的宽度;通过这样设置,较好地第二阻挡臂44伸出时与工件发生碰撞。
18.参见图1和图3,在一种实施例中,所述阻挡机构4还包括支架45,所述驱动器41、连杆机构42、第一阻挡臂43和第二阻挡臂44设于所述支架45上,所述驱动器41优选为推杆;所述第一阻挡臂43相对伸出的一端形成第一阻挡部431,所述第二阻挡臂44相对伸出的一端形成第二阻挡部441;第一阻挡臂43中部通过第一转轴46转动连接在所述支架45上,所述第二阻挡臂44中部通过第二转轴47转动连接在所述支架45上;所述连杆机构42的一端与第二阻挡臂44位于第二阻挡部441与第二转轴47之间的位置转动连接,另一端与第一阻挡臂43相对第一阻挡部431的另一端与第一转轴46之间的位置转动连接,所述驱动器41与所述第一阻挡臂43相对第一阻挡部431的另一端传动连接;通过这样设置,连杆机构42设置方式简单,同时联动第一阻挡臂43和第二阻挡臂44向相反方向运动效果好。
19.参见图1和图2,在一种实施例中,还包括控制模块(图未示)和设于输送平台1输送方向末端的第一检测器51,所述第一检测器51和举升机构3分别与控制模块电连接,所述第一检测器51用于检测限位在限位组件2的工件,并通过控制模块启动举升机构3将该工件举升至预设高度使其进入下一工序;通过设置第一检测器51,便于启动举升机构3举升工件进
入下一工序,以实现多个工件连续返修上料。
20.参见图1至图3,在一种实施例中,还包括设于第一阻挡臂43和第二阻挡臂44之间的第二检测器52,所述第二检测器52和驱动器41分别与所述控制模块电连接,第二检测器52用于检测限位在第一阻挡臂43的工件,并通过控制模块启动驱动器41控制第一阻挡臂43回收以放行限位在第一阻挡臂43的工件;通过这样设置,通过设置第二检测器52检测工件,以便驱动器41驱动第一阻挡臂43回收将工件向举升机构3方向运送。
21.所述第一检测器51和第二检测器52优选为对射式传感器。
22.参见图1和图2,在一种实施例中,所述输送平台1包括机架11、驱动机构12和设于机架11上的两组沿长度方向布置的若干滚轮13,同组滚轮13之间通过链条传动连接,所述驱动机构12用于驱动两组滚轮13运转,所述驱动机构12优选为驱动电机,所述驱动机构12通过传动链轮与所述链条传动连接;通过这样设置,输送平台1结构简单,传动效果好。
23.参见图1,在一种实施例中,所述限位组件2包括一组设于机架11上位于输送方向末端的缓冲挡片。
24.参见图1和图4,在一种实施例中,所述举升机构3包括托架31、顶升件32、竖向导向组件33和举升推杆34;所述托架31通过多个竖向导向组件33可滑动设于所述机架11上,所述举升推杆34设于机架11上,其输出端与托架31传动连接;所述托架31上表面设有若干所述顶升件32,所述顶升件32置于所述输送平台1中相邻的滚轮13之间,所述举升机构3举升时,所述顶升件32经相邻的滚轮13间的空间伸出并将工件举升至设于高度;通过这样设置,举升机构3结构简单,举升工件稳定、畅顺。
25.优选的,所述顶升组件32包括多个第一顶升柱321和第二顶升柱322,第一顶升柱321上设有与工件底面相适配的定位尖头,防止工件在举升过程中发生自移位
26.参见图1和图4,在一种实施例中,所述举升机构3还包括设于机架11上用于限位托架31行程上限和行程下限的第三检测器和第四检测器,所述第三检测器和第四检测器优选为接近开关,所述托架31上升至触发第三检测器,则控制模块控制举升推杆34暂停举升动作,待举升机构3的工件被转移后,控制模块控制举升推杆34驱动托架31下降至触发第四检测器,则控制模块控制举升推杆34暂停下降动作。
27.参见图1至图4,本发明的工件返修上料输送机构,输送工件时包括以下工作过程,初始状态下,所述第一驱动臂为伸出状态,所述第二驱动臂为收回状态,工件沿输送平台1输送至限位在第一驱动臂时,触发第二检测器52通过控制模块控制驱动器41工作,使第二驱动臂相对伸出,以及第一驱动臂收回以释放工件向输送平台1末端输送,当工件移动至限位组件2时,触发第一检测器51通过控制模块控制举升机构3将工件举升至预设高度,等待机械手抓取工件,当工件被机械手抓取后,举升机构3复位下降,待第二检测器52、第四检测器被触发以及第一检测器51未有被触发时,控制模块才控制驱动器41驱动第一阻挡臂43收回释放工件运输。
28.在本发明的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“长度”、“宽度”、“厚度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”、“顺时针”、“逆时针”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
29.在本发明的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接或可以相互通讯;可以是直接连接,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本发明中的具体含义。
30.可以理解的是,对本领域普通技术人员来说,可以根据本发明的技术方案及其发明构思加以等同替换或改变,而所有这些改变或替换都应属于本发明的保护范围。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。
