1.本实用新型涉及一种在线式工件定位装置。
背景技术:
2.目前,在机械加工或者物流运输技术领域,需要对工件进行定位,例如,在工件在机械加工的产品输送线上进行输送时,在输送至下个工位后,需要对工件进行定位后,然后再进行加工。又如,在物流输送线上,需要通过对输送线上的工件进行定位后,然后进行工件扫码。
3.无论是在哪个输送线上,均需要通过定位装置对输送线上的工件进行定位,但是,现有的用于输送线上的定位,通常是通过在输送线上升降的定位挡块来实现,不能进行全面定位。
技术实现要素:
4.为了克服现有技术的不足,本实用新型提供一种在线式工件定位装置,其可通过第一定位板上的多个第一定位轮以及第二定位板的多个第二定位轮对工件的端边以及侧边进行定位。
5.本实用新型的目的采用以下技术方案来实现:
6.一种在线式工件定位装置,包括输送架、第一定位组件以及第二定位组件,所述输送架上设有定位工位;所述定位工位的两侧均设有所述第一定位组件,所述定位工位的两端均设有所述第二定位组件;
7.第一定位组件,包括第一定位板、第一定位轮以及第一驱动件,所述第一驱动件安装于所述输送架上,所述第一定位板与所述第一驱动件的动力输出端连接;所述第一驱动件用于带动所述第一定位板由所述定位工位的侧部靠近或者远离所述定位工位;所述第一定位板上枢接有多个所述第一定位轮;
8.第二定位组件,包括第二定位板、第二定位轮以及第二驱动件,所述第二驱动件安装于所述输送架上,所述第二定位板与所述第二驱动件的动力输出端连接;所述第二驱动件用于带动所述第二定位板沿输送架的高度方向运动;所述第二定位板上枢接有多个所述第二定位轮。
9.在本实用新型中,作为一种优选的实施例,所述第一驱动件包括第一气缸,所述第一气缸的缸体安装于输送架上,所述第一气缸的活塞杆与所述第一定位板连接,所述第一气缸的活塞杆形成为所述第一驱动件的动力输出端。
10.在本实用新型中,作为一种优选的实施例,所述第二驱动件包括第二气缸,所述第二气缸的缸体安装于所述输送架上,所述第二气缸的活塞杆与所述第二定位板连接,所述第二气缸的活塞杆形成为所述第二驱动件的动力输出端。
11.在本实用新型中,作为一种优选的实施例,所述输送架上设有第三驱动件,所述第三驱动件的动力输出端连接有安装座,所述第二驱动件安装于所述安装座上;所述第三驱
动件用于带动所述安装座由定位工位的端部靠近或者远离所述定位工位运动。
12.在本实用新型中,作为一种优选的实施例,所述第三驱动件为第三气缸,所述第三气缸的活塞杆与所述安装座连接;所述第三气缸的活塞杆形成为所述第三驱动件的动力输出端。
13.在本实用新型中,作为一种优选的实施例,所述第一定位轮为橡胶轮。
14.在本实用新型中,作为一种优选的实施例,所述第二定位轮为橡胶轮。
15.相比现有技术,本实用新型的有益效果在于:
16.本实用新型在对工件进行定位时,工件可以通过输送线输送至输送架上的定位工位,其可通过定位工位两侧的两个第一定位板相互靠近,两个第一定位板上的多个第一定位轮便可对工件的两个侧边进行定位;同时,位于定位工位其中一个端部的第二定位板可以向下运动,工件便可输送线的输送作用下持续输送并抵靠在第二定位板的多个第二定位轮上,在此过程中工件的侧边可以与多个第一定位轮进行滑动配合,避免定位过程出现卡死的情况,定位过程稳定。
附图说明
17.图1为本实用新型的结构示意图;
18.图2为本实用新型的第一定位组件的结构示意图;
19.图3为本实用新型的第二定位组件的结构示意图。
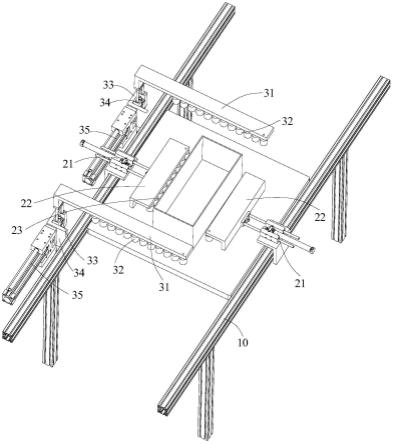
20.图中:10、输送架;21、第一气缸;22、第一定位板;23、第一定位轮;31、第二定位板;32、第二定位轮;33、第二气缸;34、安装座;35、第三气缸。
具体实施方式
21.下面,结合附图以及具体实施方式,对实用新型做进一步描述,需要说明的是,在不相冲突的前提下,以下描述的各实施例之间或各技术特征之间可以任意组合形成新的实施例。除特殊说明的之外,本实施例中所采用到的材料及设备均可从市场购得。实施例的实例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施例是示例性的,仅用于解释本技术,而不能理解对本技术的限制。
22.在本技术的描述中,需要理解的是,术语“上”、“下”、“前”、“后”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或者位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本技术和简化描述,而不是指示或者暗示所指的装置或者元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本技术的限制。在本技术的描述中,“多个”的含义是两个或两个以上,除非是另有精确具体地规定。
23.在本技术的描述中,需要说明的是,除非另有明确的规定和限定,术语“相连”、“连通”、“连接”应作广义理解,例如,可以使固定连接,也可以是通过中介媒介间相连,可以是两个元件内部的连通或者两个元件的相互作用关系。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本技术中的具体含义。
24.本技术的说明书和权利要求书及上述附图中的术语“第一”、“第二”等是用于区别类似的对象,而不必用于描述特定的顺序或先后次序。此外,术语“包括”和“具有”以及他们
的任何变形,意图在于覆盖不排他的包含,例如,包含了一系列步骤或单元的过程、方法、系统、产品或设备不必限于清楚地列出的那些步骤或单元,而是可包括没有清楚地列出的或对于这些过程、方法、产品或设备固有的其它步骤或单元。
25.如图1、图2以及图3所示的一种在线式工件定位装置,包括输送架10、第一定位组件以及第二定位组件,在输送架10上设有定位工位,且在定位工位的两侧均设有第一定位组件,而定位工位的两端均设有第二定位组件。
26.具体第一定位组件包括第一定位板22、第一定位轮23以及第一驱动件,将第一驱动件安装于输送架10上,使第一定位板22与第一驱动件的动力输出端连接,在第一驱动件的带动下,第一定位板22可以由定位工位的侧部靠近或者远离定位工位。在第一定位板22上枢接有多个第一定位轮23。
27.另外,第二定位组件包括第二定位板31、第二定位轮32以及第二驱动件,第二驱动件安装于输送架10上,第二定位板31与第二驱动件的动力输出端连接;第二驱动件用于带动第二定位板31沿输送架10的高度方向运动,即第二定位板31可以上下运动,同样的,在第二定位板31上枢接有多个第二定位轮32。
28.在上述结构基础上,使用本实用新型的在线式工件定位装置时,可以将在在线式工件定位装置应用于工件输送线上,工件输送线可以是皮带输送线或者辊筒输送线等,上述定位工位的两端可以分别位于输送线的输送方向的两端。
29.在进行定位时,工件可以通过输送线输送至输送架10上的定位工位,定位工位两侧的第一定位板22可以分别在对应的第一驱动件的带动下,由定位工位的侧部靠近定位工位运动,即两个第一定位板22可以在对应的第一驱动件的带动下相互靠近,两个第一定位板22上的多个第一定位轮23便可对工件的两个侧边进行定位。
30.同时,位于定位工位其中一个端部的第二定位板31可以向下运动,即在输送方向上靠后的第二定位板31可以在对应的第二驱动件的带动下向下运动,挡设在工件的端边,此后,工件便可输送线的输送作用下持续输送并抵靠在第二定位板31的多个第二定位轮32上,而在此过程中工件的侧边可以与多个第一定位轮23进行滑动配合,避免定位过程出现卡死的情况,定位过程稳定。
31.进一步地,在工件的端边与在输送方向上靠后的第二定位板31定位抵靠后,位于输送线的输送方向在前的第二定位板31便可向下运动,抵靠的工件另一端边,如此便可实现对工件的端边进行定位。
32.如此,可以通过两个第一定位板22的多个第一定位轮23对工件的两个侧边进行定位,两个第二定位板31的多个第二定位轮32对工件的两个进行定位,定位结构更加稳定。
33.当然,需要说明的是,上述定位过程中,是先通过两个第一定位组件对工件的侧边进行定位后,然后再通过两个第二定位组件配合输送线的输送作用,对工件的两个端边进行定位,在这一过程中,第一定位板22的多个第一定位轮23可与工件的侧边滚动配合,以辅助输送线进行工件端边定位输送。
34.而其他情况下,也可以是先通过对两个第二定位组件对工件的端边进行定位后,然后再通过两个第一定位组件对工件的侧边进行定位,在此过程中,第二定位板31上的多个第二定位轮32可以与工件的端边滑动配合,配合其中一组第一定位组件的第一驱动件推进工件,同样也可以实现工件定位稳定。
35.本实施例中,上述第一驱动件包括第一气缸21,江江第一气缸21的缸体安装于输送架10上,而第一气缸21的活塞杆与第一定位板22连接,在此结构基础上,第一气缸21的活塞杆形成为第一驱动件的动力输出端。如此,可以通过第一气缸21的活动杆伸缩带动第一定位板22由定位工位的侧部靠近或者远离定位工位,驱动结构简单且稳定。
36.同样的,上述第二驱动件包括第二气缸33,可以将第二气缸33的缸体安装于输送架10上,而第二气缸33的活塞杆与第二定位板31连接,在此结构基础上,第二气缸33的活塞杆形成为第二驱动件的动力输出端。如此,可以通过第二气缸33的活动杆伸缩,带动第二定位板31由定位工位沿输送架10的高度方向运动,实现第二定位板31的升降,驱动结构简单且稳定。
37.进一步地,还可以在输送架10上设有第三驱动件,将第三驱动件的动力输出端连接有安装座34,将上述第二驱动件安装于安装座34上。该第三驱动件可以带动安装座34由定位工位的端部靠近或者远离定位工位运动。
38.如此,第二驱动件可以带动第二定位板31实现升降,而第二驱动件安装在安装座34上,因而第三驱动件带动安装座34在定位工位的端部靠近或者远离定位工位时,即两个第二定位板31可以在第三驱动件的带动下相互靠近或者远离,如此,在对工件的端边进行定位时,可以使输送线不作业,直接通过第三驱动件带动两个第二定位板31相互靠近也可实现对工件的两个端边进行定位。
39.更具体的是,第三驱动件为第三气缸35,将第三气缸35的活塞杆与安装座34连接,在此结构基础上,该第三气缸35的活塞杆形成为第三驱动件的动力输出端。如此,可以通过第三气缸35的活动杆伸缩带动安装座34由运动即可,驱动结构简单且稳定。
40.需要说明的是,上述第一驱动件、第二驱动件以及第三驱动件还可以选用为现有技术中的电动滑台、丝杆传动机构等其他直线运动输出结构来实现。
41.进一步地,本实施例中的第一定位轮23、第二定位轮32均可以选用为橡胶轮,如此,在进行定位时,可以是通过橡胶轮与工件的端边以及侧边进行接触,橡胶材质为柔性材质,防止在定位过程中对工件刮伤,定位效果更好。
42.上述实施方式仅为本实用新型的优选实施方式,不能以此来限定本实用新型保护的范围,本领域的技术人员在本实用新型的基础上所做的任何非实质性的变化及替换均属于本实用新型所要求保护的范围。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。