1.本技术涉及晶圆加工技术领域,更具体地说,是涉及一种晶圆自动剥料设备。
背景技术:
2.在加工过程中,晶圆棒借助胶水与树脂板(晶圆板)粘合在一起,经设备用线切割、形成一片一片的晶圆单元。随后,需要再实现晶圆单元与树脂板的分离。在将晶圆单元与晶圆板分离这一操作步骤中,主要还是依靠人工的方式来完成操作,即在晶圆单元被切割好后、靠人工将晶圆单元一一取出,取放时需要保证晶圆片间片片分离。
3.但是通过人工对晶圆片剥离操作过程的劳动强度很大,严重浪费了加工企业内的人力资源、增加了人力成本。
4.因此,现有技术还有待于改进和发展。
技术实现要素:
5.本技术的目的在于提供一种晶圆自动剥料设备,解决现有技术中通过人工对晶圆片剥离操作过程的劳动强度很大导致增加了人力成本的问题。
6.为实现上述目的,本技术采用的技术方案是:本技术提供一种晶圆自动剥料设备,用于脱离晶圆板上的晶圆单元,其中,晶圆自动剥料设备包括:堆叠升降装置,堆叠升降装置包括堆叠升降驱动组件,以及连接在堆叠升降驱动组件上的堆叠框,堆叠框内用于叠放晶圆板,堆叠框通过堆叠升降驱动组件的驱动而升降;输送上料装置,输送上料装置设置在堆叠升降装置的出料侧,输送上料装置包括沿输送方向运动的推送组件,输送方向为从左至右方向;超声剥料装置,超声剥料装置设置在堆叠升降装置的右侧的上方,超声剥料装置用于对下方的晶圆板进行振动以使晶圆单元脱料;推送组件包括:吸取件和侧推板,吸取件和侧推板沿输送方向间隔设置,推送组件沿输送方向移动而使侧推板将位于超声剥料装置下方的晶圆板推出,并使吸取件将堆叠升降装置上的下一块晶圆板带动到超声剥料装置的下方。
7.可选地,晶圆自动剥料设备还包括:机架;堆叠升降驱动组件包括:堆叠驱动电机,堆叠驱动电机设置在机架上;滚珠丝杠和丝杠螺母,滚珠丝杠沿上下方向转动设置在机架上,并与堆叠驱动电机传动连接;堆叠升降架,堆叠升降架连接在丝杠螺母上;堆叠框包括:框底板,框底板连接在堆叠升降架上;堆叠架,框底板的顶部两侧均设置一堆叠架,两个堆叠架上沿上下方向设置有多个插槽,两个堆叠架上的插槽相配并用于插放晶圆板。
8.可选地,输送上料装置还包括:
驱动组件,驱动组件用于提供动力;支撑臂组件,支撑臂组件连接在驱动组件上,并通过驱动组件的带动而沿输送方向进行滑移;第一升降气缸,第一升降气缸连接在支撑臂组件上,推送组件连接在第一升降气缸上,并通过第一升降气缸的驱动而沿上下方向移动;下支撑组件,下支撑组件位于支撑臂组件的下方,且位于超声剥料装置的下方并用于限位晶圆板。
9.可选地,下支撑组件包括:上挡环部,上挡环部的左右两侧均设置有开口,上挡环部的下方开设有下落通道;下压紧部,下压紧部位于上挡环部的下方且设置在下落通道的两侧,下压紧部和上挡环部之间形成限位空间,限位空间用于容纳晶圆板,以使晶圆板上的晶圆单元位于下落通道内;第二升降气缸,下压紧部连接在第二升降气缸上,并通过第二升降气缸的驱动而靠近或远离上挡环部。
10.可选地,下支撑组件还包括位于下落通道的两侧的导向架,两侧的导向架相对立设置,上挡环部固定设置在导向架上;导向架沿输送方向的两端凸出于上挡环部沿输送方向的两端;两个导向架相对的一侧均开设有导向槽,晶圆板位于两侧的导向槽内滑移。
11.可选地,下压紧部包括:l形支撑板,l形支撑板具有横板以及竖板,横板位于导向架的下方并连接在第二升降气缸上,竖板位于导向架朝向下落通道的一侧;多个支撑台,多个支撑台间隔设置在竖板的顶面上,支撑台与上挡环部之间形成限位空间。
12.可选地,上挡环部的出料侧设置有侧面限位组件,侧面限位组件包括:升降限位部,升降限位部设置在上挡环部的出料侧;第三升降气缸,第三升降气缸连接升降限位部;升降限位部通过第三升降气缸的驱动而上升或下降,以抵靠位于限位空间内的晶圆板的边缘。
13.可选地,下落通道内设置有脱料盘,脱料盘用于收集从晶圆板上脱离的晶圆单元;脱料盘的下方设置有升降盘组件,脱料盘可拆卸设置在升降盘组件上,脱料盘通过升降盘组件的驱动而上下移动。
14.可选地,超声剥料装置包括:脱料超声波,脱料超声波位于上挡环部的上方;xyz方向驱动组件,脱料超声波连接在xyz方向驱动组件上,并通过xyz方向驱动组件的驱动而沿前后、左右或上下方向移动;机械脱粒件,机械脱粒件设置在xyz方向驱动组件上,且与脱料超声波同步移动,并用于击打晶圆板。
15.可选地,机械脱粒件包括:冲击气缸,冲击气缸沿上下方向设置在xyz方向驱动组件上;脱粒钉,脱粒钉连接在冲击气缸上,并通过冲击气缸的驱动而击打晶圆板。
16.本技术提供的一种晶圆自动剥料设备的有益效果至少在于:堆叠框内叠放有未脱
粒晶圆单元的晶圆板,通过堆叠升降驱动组件可以将堆叠框向上推动,使输送上料装置能依次将堆叠框内最上方的晶圆板移出,推送组件沿输送方向移动,且吸取件和侧推板沿输送方向间隔设置并沿输送方向同步移动;当进行晶圆板输送时,吸取件吸取位于堆叠框上的下一块晶圆板,并将下一块晶圆板带动到超声剥料装置的下方的同时,侧推板沿输送方向移动而将位于超声剥料装置下方已经脱粒后的晶圆板推出;从而在一次移动的过程中即将晶圆板从脱粒位置推出,同时将下一块晶圆板从堆叠升降装置上移动到脱粒位置,推送组件的一次推移就实现了晶圆板的下料以及下一块晶圆板的上料,因此大大减少了原有的输送步骤,加快了上料速度,提高了晶片单元剥离的效率。而且在超声剥料装置下方的脱粒位置,对晶圆板释放超声波,使晶圆板上的晶圆单元脱落,从而实现了晶圆单元的自动脱粒分离,降低了晶圆片剥离操作过程的劳动强度,提高了晶圆单元的剥离效率,节约了人力成本。
附图说明
17.为了更清楚地说明本技术实施例中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本技术的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
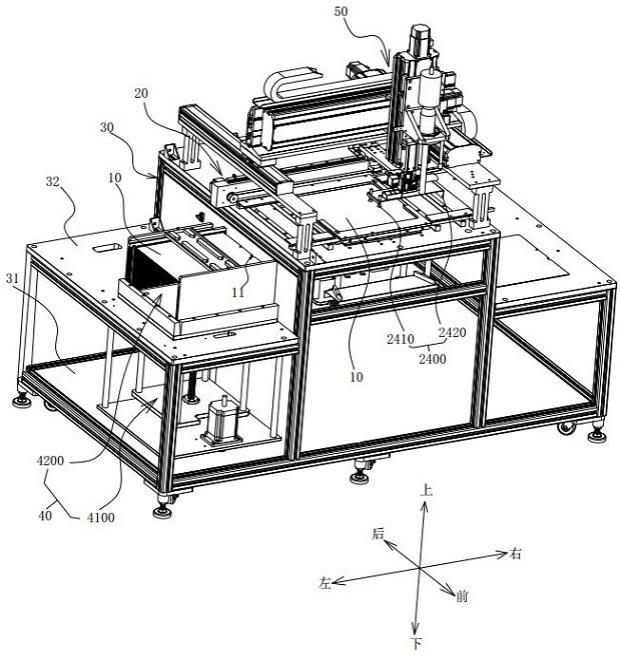
18.图1为本技术实施例提供的一种晶圆自动剥料设备的结构示意图;图2为本技术实施例提供的一种晶圆自动剥料设备的堆叠升降装置的结构示意图;图3为本技术实施例提供的一种晶圆自动剥料设备的堆叠升降装置的另一视角的结构示意图;图4为本技术实施例提供的一种用晶圆自动剥料设备的输送上料装置在输送晶圆板的状态示意图;图5为本技术实施例提供的一种用晶圆自动剥料设备的输送上料装置的主要结构示意图;图6为本技术实施例提供的一种用晶圆自动剥料设备的驱动组件、支撑臂组件以及推送组件的结构示意图;图7为本技术实施例提供的一种晶圆自动剥料设备的下支撑组件的结构示意图;图8为本技术实施例提供的一种晶圆自动剥料设备的下支撑组件的剖视图;图9为本技术实施例提供的一种晶圆自动剥料设备的脱料盘和升降盘组件的结构示意图;图10为本技术实施例提供的一种晶圆自动剥料设备的升降盘组件的结构示意图;图11为本技术实施例提供的一种晶圆自动剥料设备的超声剥料装置的主视图;图12为本技术实施例提供的一种晶圆自动剥料设备的超声剥料装置的结构示意图;图13为图8的a处的放大示意图;图14为图3的b处的放大示意图。
19.其中,图中各附图标记:
10、晶圆板;11、限位槽;20、输送上料装置;30、机架;31、下机板;32、上机板;40、堆叠升降装置;50、超声剥料装置;2100、驱动组件;2110、驱动支架;2120、带传动件;2121、第一电机;2122、主动带轮;2123、从动带轮;2124、皮带;2125、调节块;2126、调节螺杆;2130、导轨;2140、滑块;2200、支撑臂组件;2210、主支撑板;2220、连接座体;2221、加强筋板;2230、带连接座;2231、下延伸块;2232、连接压板;2300、第一升降气缸;2310、气缸磁性开关;2400、推送组件;2410、吸取件;2411、负压吸头;2420、侧推板;2430、推送支板;2500、下支撑组件;2510、上挡环部;2520、下压紧部;2521、l形支撑板;2522、支撑台;2530、第二升降气缸;2540、下落通道;2550、限位空间;2560、导向架;2561、导向槽;2562、导向开口;2563、压块;2600、侧面限位组件;2610、升降限位部;2611、限位连接台;2612、限位柱;2613、腰形孔;2620、第三升降气缸;2700、脱料盘;2710、升降盘组件;2711、第四升降气缸;2712、升降连接台;2713、导向滑杆;2714、电磁铁;2720、导向进入部;4100、堆叠升降驱动组件;4110、堆叠驱动电机;4120、滚珠丝杠;4130、丝杠螺母;4140、堆叠升降架;4141、支撑导杆;4150、同步带;4200、堆叠框;4210、框底板;4220、堆叠架;4221、插槽;5100、脱料超声波;5200、xyz方向驱动组件;5210、y向支架;5220、y向直线移动台;5221、y向导轨;5222、y向滑台;5230、x向支架;5240、x向直线移动台;5250、z向支架;5260、z向直线移动台;5270、超声连接台;5300、机械脱粒件;5310、冲击气缸;5320、脱粒钉;5400、离子风枪。
具体实施方式
20.为了使本技术所要解决的技术问题、技术方案及有益效果更加清楚明白,以下结合附图及实施例,对本技术进行进一步详细说明。应当理解,此处所描述的具体实施例仅用以解释本技术,并不用于限定本技术。
21.需要说明的是,当部件被称为“固定于”或“设置于”另一个部件,它可以直接或者间接位于该另一个部件上。当一个部件被称为“连接于”另一个部件,它可以是直接或者间接连接至该另一个部件上。术语“上”、“下”、“左”、“右”、“前”、“后”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置为基于附图所示的方位或位置,仅是为了便于描述,不能理解为对本技术方案的限制。术语“第一”、“第二”仅用于便于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明技术特征的数量。“多个”的含义是两个或两个以上,除非另有明确具体的限定。
22.如图1所示,本实施例的提供一种晶圆自动剥料设备,用于将晶圆板10上的晶圆单元进行剥离,其中,晶圆自动剥料设备包括机架30,堆叠升降装置40,超声剥料装置50,以及输送上料装置20。堆叠升降装置40设置在机架30上,输送上料装置20用于将堆叠升降装置40上的晶圆板10沿输送方向输送到超声剥料装置50下进行晶圆单元剥离,再将剥离晶圆单元后的晶圆板10推出到废料区,废料区位于输送上料装置20的出料侧。为方便结构描述,以将晶圆板10从左至右进行输送,即输送方向为左右方向,水平面上以垂直于左右方向的方向为前后方向,高度方向为上下方向。堆叠升降装置40包括堆叠升降驱动组件4100,以及连接在堆叠升降驱动组件4100上的堆叠框4200,堆叠框4200内用于叠放晶圆板10,堆叠框4200通过堆叠升降驱动组件4100的驱动而升降。超声剥料装置50设置在堆叠升降装置40的右侧的上方,超声剥料装置50用于对下方的晶圆板10进行振动以使晶圆单元脱料。输送上料装置20设置在堆叠升降装置40的右侧(出料侧),废料区位于输送上料装置20的右侧。如
图1、图4、图5所示,输送上料装置20包括沿左右方向运动的推送组件2400,推送组件2400包括:吸取件2410和侧推板2420,吸取件2410和侧推板2420沿左右方向间隔设置,推送组件2400沿左右方向移动而使侧推板2420将位于超声剥料装置50下方的晶圆板10从右侧推出,并使吸取件2410将堆叠升降装置40上的下一块晶圆板10沿左向右并带动到超声剥料装置50的下方。
23.本技术方案中,堆叠框4200内叠放有未脱粒晶圆单元的晶圆板10,通过堆叠升降驱动组件4100可以将堆叠框4200向上推动,使输送上料装置20能依次将堆叠框4200内最上方的晶圆板10移出,推送组件2400沿输送方向移动,且吸取件2410和侧推板2420沿输送方向间隔设置并沿输送方向同步移动;当进行晶圆板10输送时,吸取件2410吸取位于堆叠框4200上的下一块晶圆板10,并将下一块晶圆板10带动到超声剥料装置50的下方的同时,侧推板2420沿输送方向移动而将位于超声剥料装置50下方已经脱粒后的晶圆板10推出;从而在一次移动的过程中即将晶圆板10从脱粒位置推出,同时将下一块晶圆板10从堆叠升降装置40上移动到脱粒位置,推送组件2400的一次推移就实现了晶圆板10的下料以及下一块晶圆板10的上料,因此大大减少了原有的输送步骤,加快了上料速度,提高了晶片单元剥离的效率。而且在超声剥料装置50下方的脱粒位置,对晶圆板10释放超声波,使晶圆板10上的晶圆单元脱落,从而实现了晶圆单元的自动脱粒分离,降低了晶圆片剥离操作过程的劳动强度,提高了晶圆单元的剥离效率,节约了人力成本。
24.如图1、图2、图3所示,本实施例中的堆叠升降驱动组件4100具体包括:堆叠驱动电机4110,滚珠丝杠4120和丝杠螺母4130,以及堆叠升降架4140。堆叠驱动电机4110设置在机架30下部的下底板上,机架30的上部为上机板32,滚珠丝杠4120沿上下方向转动设置在机架30的下机板31和上机板32上,滚珠丝杠4120贯穿下机板31,滚珠丝杠4120位于下机板31下方的部分与堆叠驱动电机4110传动连接。具体的连接结构中,堆叠驱动电机4110通过同步带组件4150连接到滚珠丝杠4120位于下机板31下方的部分,从而通过同步带传动实现对滚珠丝杠4120的精准驱动控制。堆叠升降架4140连接在丝杠螺母4130上;当滚珠丝杠4120转动,使丝杠螺母4130上下移动,从而带动升降架进行上下移动。升降架通过多根支撑导杆4141贯穿上机板32后连接到堆叠框4200,从而多根支撑导杆4141不仅对堆叠框4200进行支撑,而且与上机板32相配进行导向,使堆叠框4200进行稳定的上下移动。如图3、图14所示,本实施例中的堆叠框4200具体包括:框底板4210,以及堆叠架4220。框底板4210连接在堆叠升降架4140上,具体连接在支撑导杆4141的上端。框底板4210的顶部两侧均设置一堆叠架4220,两个堆叠架4220上沿上下方向设置有多个插槽4221,两个堆叠架上的插槽4221相配并用于插放晶圆板10。插槽4221沿左右方向延伸设置,且左右方向的两端设置开口,从而可以使晶圆板10从左右方向插进和抽出。多个插槽4221可以一次堆叠多个晶圆板10,每次通过输送上料装置20的推送组件2400将最上面的晶圆板10吸取后并从插槽4221中抽出,并输送到超声剥料装置50的下方进行晶圆单元的剥离。
25.当最上方的晶圆板10被抽离后,通过堆叠升降驱动组件4100驱动堆叠框4200向上一小段距离,使下一层的晶圆板10移动到上一层的位置,等待输送上料装置20的推送组件2400下一次的输送。
26.如图1、图4、图5所示,输送上料装置20设置在机架30上,输送上料装置20还包括:驱动组件2100,支撑臂组件2200,第一升降气缸2300,以及下支撑组件2500。本实施例中的
驱动组件2100设置在机架30上,并用于提供动力,支撑臂组件2200连接在驱动组件2100上,并通过驱动组件2100的带动而沿左右方向进行滑移。第一升降气缸2300连接在支撑臂组件2200上,第一升降气缸2300的活塞杆沿上下方向设置,推送组件2400连接在第一升降气缸2300上,并通过第一升降气缸2300的驱动而沿上下方向移动。下支撑组件2500位于支撑臂组件2200的下方,且位于超声剥料装置的下方,并用于限位晶圆板10,晶圆板10被送到下支撑组件2500上后将晶圆板10进行限位固定,然后通过上方的超声剥料装置对晶圆单元进行剥离。本实施例的推送组件2400包括吸取件2410和侧推板2420,吸取件2410和侧推板2420沿输送方向间隔设置,具体地,吸取件2410设置在左端,侧推板2420设置在右端,推送组件2400沿输送方向移动而使侧推板2420将位于下支撑组件2500上的晶圆板推出,并使吸取件2410将下一块晶圆板带动到下支撑组件2500上。支撑臂组件2200通过驱动组件2100的驱动而沿输送方向来回移动,推送组件2400通过第一升降气缸2300的驱动而沿上下方向移动,第一升降气缸2300通过支撑臂组件2200的带动而可以沿输送方向移动,且吸取件2410和侧推板2420沿输送方向间隔设置并在支撑臂组件2200的带动下而沿输送方向移动;当进行晶圆板10输送时,吸取件2410吸取下一块晶圆板,并将下一块晶圆板带动到下支撑组件2500上的同时,侧推板2420沿输送方向移动而将位于下支撑组件2500上的晶圆板推出;从而在一次移动的过程中即将晶圆板从下支撑组件2500上推出,同时将下一块晶圆板移动到下支撑组件2500上,支撑臂组件2200的一次推移就实现了晶圆板的下料以及下一块晶圆板的上料,因此大大减少了原有的输送步骤,加快了上料速度,提高了晶片单元剥离的效率。
27.如图4、图5、图6所示,本实施例中的驱动组件2100具体包括:驱动支架2110,带传动件2120,以及导轨2130和滑块2140。驱动支架2110固定连接在机架30上,驱动支架2110沿左右方向延伸一预设距离,并位于下支撑组件2500的后侧,带传动件2120沿左右方向设置在驱动支架2110上,带传动件2120连接支撑臂组件2200,支撑臂组件2200通过带传动件2120的驱动而移动,导轨2130沿左右方向固定设置在驱动支架2110的顶部,滑块2140与导轨2130相配设置,使滑块2140可以在导轨2130上滑动设置,滑块2140连接支撑臂组件2200。带传动件2120启动,带动支撑臂组件2200进行左右移动,由于导轨2130与滑块2140配合,从而使支撑臂组件2200在左右方向上稳定滑移。
28.如图5、图6所示,带传动件2120具体包括:第一电机2121,主动带轮2122,从动带轮2123,以及套设在主动带轮2122和从动带轮2123上的皮带2124。第一电机2121固定连接在驱动支架2110的左端,主动带轮2122连接在第一电机2121上,并通过第一电机2121的转动而转动。从动带轮2123转动连接在调节块2125上,调节块2125活动设置在驱动支架2110上,并可以沿左右方向进行位置调节。调节块2125的后部设置有调节螺纹孔,驱动支架2110的对应区域设置有调节腰形孔,调节腰形孔沿左右方向延伸预设长度,通过调节螺钉穿设过调节腰形孔后螺接到调节螺纹孔上,就能对调节块2125的位置进行固定。而且在驱动支架2110的右侧螺接有调节螺杆2126,调节螺杆2126穿过驱动支架2110的一端转动连接在调节块2125内,从而通过拧动调节螺杆2126,使调节螺杆2126可以沿左右方向移动,从而带动调节块2125沿左右方向移动,这样可以调节皮带2124的松紧程度。皮带2124连接支撑臂组件2200,通过第一电机2121驱动主动带轮2122转动,通过皮带2124带动从动带轮2123转动,皮带2124沿左右方向移动,从而带动支撑臂组件2200沿左右方向移动。
29.如图5、图6所示,本实施例中的支撑臂组件2200具体包括:主支撑板2210,连接座
体2220,以及带连接座2230。主支撑板2210沿前后方向延伸有一定的预设长度,主支撑板2210的一端固定连接滑块2140,具体地,主支撑板2210的后端的下表面设置有卡位槽,滑块2140位于卡位槽内并通过螺钉与主支撑板2210固定连接。连接座体2220位于主支撑板2210的另一端上,第一升降气缸2300固定连接在连接座体2220上;具体结构中连接座体2220朝向下方延伸设置,并与主支撑板2210的前端一体成型,连接座体2220的前表面用于与第一升降气缸2300固定连接,连接座体2220的两侧设置有加强筋板2221,三角形加强筋板2221作为左右两侧面连接在主支撑板2210上,以增强连接座体2220的支撑强度。带连接座2230的一端与带传动件2120固定连接,另一端与主支撑板2210固定连接,具体结构中,带连接座2230包括下延伸块2231,以及连接压板2232;下延伸块2231的上端通过螺钉固定连接在主支撑板2210上,下延伸块2231朝向下方延伸设置,连接压板2232与下延伸块2231通过螺钉可拆卸连接,皮带2124被压在下延伸块2231和连接压板2232之间,连接压板2232朝向皮带2124的一侧设置有压齿,通过压齿可以对皮带2124压得更紧固,防止皮带2124松动。
30.如图6所示,第一升降气缸2300上设置有气缸磁性开关2310,通过气缸磁性开关2310可以检测第一升降气缸2300的活塞位置,从而检测活塞杆的运动行程,检测出第一升降气缸2300是否运动到预设位置,利于自动化控制。
31.如图5、图6所示,本实施例中的推送组件2400还包括:推送支板2430,推送支板2430沿左右方向延伸一段长度。推送支板2430的一端向下弯折形成侧推板2420,侧推板2420位于右端向下延伸设置,以便于其推动晶圆板10脱离下支撑组件2500,从而被推出。吸取件2410包括负压吸头2411,负压吸头2411沿上下方向设置在推送支板2430的左端。负压吸头2411与侧推板2420位于左右方向上,因此当负压吸头2411吸取移入下一块晶圆板的同时,侧推板2420推出晶圆板。实现了晶圆板10边卸料边装料的过程。优化了上料步骤。
32.如图5、图7、图8、图13所示,本实施例中的下支撑组件2500具体包括:上挡环部2510,下压紧部2520,以及第二升降气缸2530。上挡环部2510沿左右方向的两侧均设置有开口,下支撑组件2500的左侧为入料侧,右侧为出料侧,入料侧和出料侧的开口均大于吸取件2410和侧推板2420的宽度,从而使吸取件2410和侧推板2420均能从上挡环部2510中贯穿而过,从而方便对晶圆板10进行推入和推出。如图4、图8、图13所示,上挡环部2510的上表面具有镂空结构,上挡环部2510的下方开设有下落通道2540,下压紧部2520位于上挡环部2510的下方且设置在下落通道2540的前后两侧,下压紧部2520和上挡环部2510之间形成限位空间2550,限位空间2550用于容纳晶圆板10,以使晶圆板10上的晶圆单元位于下落通道2540内;具体结构中,限位空间2550位于下落通道2540的前后两侧,当晶圆板10被推入到下支撑组件2500后,使晶圆板10的前后两侧边缘置于限位空间2550中,且晶圆板10连接晶圆单元的部分位于下落通道2540内,晶圆板10的上表面位于镂空结构中,对晶圆板10的上表面增加振动,那么位于晶圆板10下表面上的晶圆单元就会被振下,从而从下落通道2540中掉落,从而可以在下落通道2540中被收集。下压紧部2520连接在第二升降气缸2530上,并通过第二升降气缸2530的驱动而靠近或远离上挡环部2510。第二升降气缸2530沿上下方向固定在机架30上,下压紧部2520通过第二升降气缸2530的驱动而可动设置,当晶圆板10被推到限位空间2550内后,通过启动第二升降气缸2530,使第二升降气缸2530向上推动下压紧部2520,从而使下压紧部2520朝向上移动,从而将晶圆板10的前后两侧边缘压紧在上挡环部2510和下压紧部2520之间,从而在振动时保证晶圆板10的前后两边缘固定。
33.如图5、图7、图8、图13所示,本实施例中的下支撑组件2500还包括位于下落通道2540的两侧的导向架2560,导向架2560固定在机架30上,前后两侧的导向架2560相对立设置,上挡环部2510的前后两部分分别固定设置在两侧的导向架2560上。导向架2560沿左右方向的两端均凸出于上挡环部2510沿左右方向的两端;即在左右方向上,导向架2560的长度大于上挡环部2510的长度。两个导向架2560相对的一侧开设有导向槽2561,晶圆板10位于两侧的导向槽2561内滑移,通过位于入料侧的导向架2560对下一块晶圆板进行导向,从而使晶圆板10顺着导向槽2561进入到上挡环部2510的下方限位空间2550中,通过出料端的导向架2560对晶圆板进行导向,从而使晶圆板顺着导向槽2561移出限位空间2550。为方便晶圆板10的进入,在导向架2560的入料侧(左侧)开设导向开口2562,导向开口2562的内壁均设置为倾斜面,导向槽2561的开口从左到右逐渐变小,从而使外侧大,而内侧小,这样就更对晶圆板10进行导向,使移动过程中不正的晶圆板10通过导向开口2562后摆正,顺利在导向槽2561中从左到右移动。为实现对导向槽2561的上侧进行限位,在两侧的导向架2560的左右两端均设置有压块2563,通过压块2563来覆盖导向槽2561的上方,使晶圆板10被限位在导向槽2561内。
34.如图7、图8、图13所示,本实施例中的下压紧部2520具体包括:l形支撑板2521,以及多个支撑台2522。l形支撑板2521具有横板以及竖板,横板和竖板均沿左右方向延伸设置,横板位于导向架2560的下方并连接在第二升降气缸2530上,竖板位于导向架2560朝向下落通道2540的一侧。这样l形支撑板2521可以避开导向架2560的结构而位于下落通道2540内。多个支撑台2522间隔设置在竖板的顶面上,支撑台2522与上挡环部2510之间形成限位空间2550。在初始阶段,多个支撑台2522的顶面位于导向槽2561的下表面的下方,从而当晶圆板10进入到下落通道2540的两侧的导向槽2561中后,支撑台2522先不对晶圆板10的边缘进行支撑,然后启动第二升降气缸2530,第二升降气缸2530抬升支撑台2522,此时支撑台2522凸出于导向槽2561的底面,并将晶圆板10压紧在上方的上挡环部2510上。多个支撑台2522沿左右方向间隔设置,这样将对晶圆板10的接触面化整为零,多个点实现对晶圆板10的边缘进行支撑,从而可以对晶圆板10支撑更稳定,而且支撑台2522之间的间隔空间不对晶圆板10边缘进行抵靠,从而在振动过程中可以增加变形空间,防止晶圆板10被振坏。
35.如图5、图7、图8、图13所示,本实施例中的上挡环部2510的出料侧设置有侧面限位组件2600,侧面限位组件2600包括:升降限位部2610,以及第三升降气缸2620。第三升降气缸2620固定连接在机架30上,且升降限位部2610连接在第三升降气缸2620上。升降限位部2610沿上下方向设置在上挡环部2510的出料侧,升降限位部2610通过第三升降气缸2620的驱动而上升或下降,当晶圆板从上挡环部2510下方的导向槽2561移出后,第三升降气缸2620启动,从而使升降限位部2610上升,并阻挡在上挡环部2510的出料侧,当下一块晶圆板被送入到限位空间2550内后(上挡环部2510的下方),升降限位部2610可以抵靠位于限位空间2550内的晶圆板10的边缘,使下一块晶圆板限位在上挡环部2510的下方且位于下落通道2540的上方。
36.本实施例中的升降限位部2610具体包括:限位连接台2611,以及限位柱2612。限位连接台2611上设置有腰形孔2613,腰形孔2613沿输送方向延伸设置,腰形孔2613内穿设螺钉并使限位连接台2611固定到第三升降气缸2620;通过设置腰形孔2613与螺钉进行配合,从而使限位连接台2611在左右方向可调节,从而可以对晶圆板10的右侧的限位位置进行调
整。限位柱2612设置有两个,两个限位柱2612沿输送方向的垂直方向上间隔排列,通过两个限位柱2612对晶圆板10的右端进行限位。晶圆板10的一端边缘上开设有限位槽11,限位柱2612抵靠于限位槽11内。通过设置限位槽11,从而可以与限位柱2612相配进行限位。
37.如图4、图9所示,本实施例中的下落通道2540内设置有脱料盘2700,脱料盘2700用于收集从晶圆板10上脱离的晶圆单元,脱料盘2700的下方设置有升降盘组件2710,升降盘组件2710固定设置在机架30上,脱料盘2700可拆卸设置在升降盘组件2710上,脱料盘2700通过升降盘组件2710的驱动而上下移动。当脱料盘上移到高点时,脱料盘接近位于下落通道2540内的晶圆板10,从而使振动脱离晶圆板10的晶圆单元顺利下落到脱料盘内。当脱料盘装满或装到预设量后,脱料盘通过升降盘组件2710而下降到机架30的下部,从而方便操作者将脱料盘2700取出。
38.本实施例中的升降盘组件2710包括:第四升降气缸2711、升降连接台2712以及多个导向滑杆2713。第四升降气缸2711固定设置机架30的下部,升降连接台2712固定设置在第四升降气缸2711上部,多个导向滑杆2713穿设在机架30的下部,并沿上下方向连接在升降连接台2712上,升降连接台2712的左右两侧设置有卡台,使脱料盘2700限位在两侧的卡台内。
39.如图9、图10所示,为实现脱料盘2700与升降连接台2712的可拆卸连接,在升降连接台2712的表面上设置有电磁铁2714,脱料盘在固定时可以与电磁铁2714进行相吸。在松开时,电磁铁2714断电而不对脱料盘作用。
40.在机架30的下部且位于脱料盘的进出侧(前侧)设置有导向进入部2720,导向进入部2720由两侧的倾斜导块进行导向,使脱料盘能顺利进入到升降连接台2712上。
41.如图1、图11所示,本实施例中的超声剥料装置50具体包括:脱料超声波5100,xyz方向驱动组件5200,机械脱粒件5300。xyz方向驱动组件5200设置在机架30上,其主要作用是带动超声波实现位置移动。如图11、图12所示,xyz方向驱动组件5200具体包括:y向支架5210,y向直线移动台5220,y向导轨5221与y向滑台5222,x向支架5230,x向直线移动台5240,z向支架5250,z向直线移动台5260。y向支架5210沿前后方向延伸设置,且呈“π”形,y向支架5210设置有两个,两个y向支架5210分别设置在机架30的左右两侧;y向直线移动台5220设置在一侧的y向支架5210上,y向导轨5221与y向滑台5222设置在另一侧的y向支架5210上;通过y向支架5210对结构进行支撑。x向支架5230呈
“⊥”
形,并沿左右方向延伸设置,x向支架5230的左右两端中的一端连接在y向直线移动台5220上、另一端连接在y向滑台5222上,通过y向直线移动台5220的驱动,而带动x向支架5230沿前后方向移动。x向直线移动台5240沿左右方向延伸设置,并固定连接在x向支架5230的侧面上。z向支架5250连接在x向直线移动台5240上,并通过x向直线移动台5240的驱动而使z向支架5250沿左右方向移动。z向支架5250沿上下方向延伸设置,z向直线移动台5260固定连接在z向支架5250上,脱料超声波5100通过超声连接台5270连接在z向直线移动台5260上。通过z向直线移动台5260的驱动带动超声连接台5270沿上下方向移动,从而可以带动脱料超声波5100沿上下方向移动。脱料超声波5100位于上挡环部2510的上方,脱料超声波5100连接在xyz方向驱动组件5200上,并通过xyz方向驱动组件5200的驱动而沿前后、左右、或上下方向移动;这样可以将脱料超声波5100带动到下方晶圆板10的不同位置,从而可以针对晶圆板10不同位置的晶圆单元进行超声剥料。机械脱粒件5300设置在xyz方向驱动组件5200上,且与脱料超声波5100
同步移动,并用于击打晶圆板10;当晶圆板10背面的晶圆单元比较难脱离时,可以通过机械脱粒件5300对晶圆板10的背面施加强振动,从而使晶圆单元能顺利脱离。
42.如图11、图12所示,本实施例中的机械脱粒件5300具体包括:冲击气缸5310,以及脱粒钉5320。冲击气缸5310沿上下方向设置在xyz方向驱动组件5200上,具体为冲击气缸5310沿上下方向设置在超声连接台5270上,脱粒钉5320连接在冲击气缸5310上,并通过冲击气缸5310的驱动而击打晶圆板10。脱粒钉5320的下端设置成扁平状,其能对晶圆板10的施力面积大,便于对晶圆板10进行大范围的击打而使晶圆单元更容易脱离,位于背面的晶圆单元脱离后直接从下落通道2540内掉落到脱料盘2700内。
43.如图11、图12所示,在xyz方向驱动组件5200上还设置有离子风枪5400,离子风枪5400的出风侧正对下方的晶圆板10。离子风枪5400可产生大量的带有正负电荷的气团,被压缩气高速吹出,可以将物体上所带的电荷中和掉。当物体表面所带电荷为负电荷时,它会吸引气流中的正电荷,当物体表面所带电荷为正电荷时,它会吸引气流中的负电荷,从而使物体表面上的静电被中和,达到消除静电的目的,高速的压缩气还可将物体上面的顽固积尘吹走。
44.综上所述,本技术提供的一种晶圆自动剥料设备,堆叠框内叠放有未脱粒晶圆单元的晶圆板,通过堆叠升降驱动组件可以将堆叠框向上推动,使输送上料装置能依次将堆叠框内最上方的晶圆板移出,推送组件沿输送方向移动,且吸取件和侧推板沿输送方向间隔设置并沿输送方向同步移动;当进行晶圆板输送时,吸取件吸取位于堆叠框上的下一块晶圆板,并将下一块晶圆板带动到超声剥料装置的下方的同时,侧推板沿输送方向移动而将位于超声剥料装置下方已经脱粒后的晶圆板推出;超声剥料装置使晶圆板上的晶圆单元脱落,从而实现了晶圆单元的自动脱粒分离,降低了晶圆片剥离操作过程的劳动强度,提高了晶圆单元的剥离效率,节约了人力成本。
45.以上所述仅为本技术的较佳实施例而已,并不用以限制本技术,凡在本技术的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本技术的保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。
