1.本技术涉及无人机技术领域,特别是一种多旋翼无人机。
背景技术:
2.随着无人机技术的发展进步,多旋翼无人机在农业植保、消防安全等场景中逐渐得到推广应用。
3.现有多旋翼无人机的喷嘴由于布置位置的关系,在执行液体喷洒任务时,喷出的雾状液滴往往会受到电机上桨叶旋转产生的气流的扰动,部分区域喷洒过多,部分区域喷洒过少甚至无法喷洒到位。
4.因此,目前的多旋翼无人机在喷洒液体时,液体喷洒存在不均匀的问题。
技术实现要素:
5.为了解决现有的多旋翼无人机在喷洒液体时,液体喷洒存在不均匀的问题,本技术提供了一种多旋翼无人机。
6.本技术实施例提供了一种多旋翼无人机,所述无人机包括机身本体、机臂和脚架;
7.所述机臂和所述脚架均与所述机身本体连接,所述机身本体中设置有储液箱,所述机臂上设置有第一喷嘴,所述第一喷嘴与所述储液箱连通;
8.所述脚架开设有出风口,沿偏航轴的投影方向,所述出风口位于所述多旋翼无人机的桨叶围成的区域内。
9.本技术实施例中,提供了一种多旋翼无人机,该多旋翼无人机的机臂上设置有与储液箱连通的第一喷嘴,在多旋翼无人机的脚架上开设有出风口,且沿偏航轴的投影方向,出风口位于多旋翼无人机的桨叶围成的区域内。因此,在桨叶围成的区域内,可以通过出风口输出气流,使桨叶转动形成的负压效应得以弱化,避免第一喷嘴喷洒出的液体过度聚集在桨叶围成的区域内,从而有助于改善液体喷洒的均匀性。
附图说明
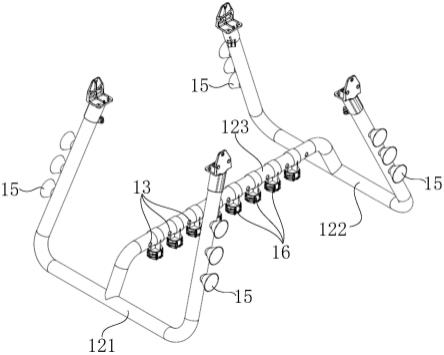
10.图1示意性地示出了本技术实施例的一种多旋翼无人机的轴测示意图;
11.图2示意性地示出了本技术实施例的多旋翼无人机沿俯仰轴pitch方向的视图;
12.图3示意性地示出了本技术实施例的多旋翼无人机沿横滚轴roll方向的视图;
13.图4示意性地示出了本技术实施例的多旋翼无人机沿偏航轴yaw方向的俯视图;
14.图5示意性地示出了本技术实施例的多旋翼无人机沿偏航轴yaw方向的仰视图;
15.图6示意性地示出了本技术实施的多旋翼无人机的脚架结构示意图。
具体实施方式
16.下面将结合本技术实施例中的附图,对本技术实施例中的技术方案进行清楚、完整地描述。
17.参照图1至图5,本技术实施例提供了一种多旋翼无人机,所述多旋翼无人机包括机身本体10、机臂11和脚架12;
18.所述机臂11和所述脚架12均与所述机身本体10连接,所述机身本体10中设置有储液箱101,所述机臂11上设置有第一喷嘴111,所述第一喷嘴111与所述储液箱101连通;
19.所述脚架12开设有出风口13,沿偏航轴yaw的投影方向,所述出风口13位于所述多旋翼无人机的桨叶围成的区域内。
20.具体而言,本技术实施例提供的多旋翼无人机可以是用于农业植保领域或者消防安全领域中。如图1所示,该多旋翼无人机包括机身本体10、机臂11和脚架12。
21.机身本体10作为多旋翼无人机的结构载体,用于安装连接机臂11和脚架12。机身本体10上除了布置常规的控制电路板、电池等组件,机身本体10上还放置有储液箱101,当该多旋翼无人机用于农业植保领域时,储液箱101中可以盛装药液或者营养液。当该多旋翼无人机用于消防安全领域时,储液箱101中可以盛装水或者泡沫剂等灭火剂。机臂11作为安装固定电机以及桨叶的结构,在机臂11上位于电机和机身本体10之间的空闲部位可以安装设置第一喷嘴111,可以理解的是,该第一喷嘴111与储液箱101连通,利用第一喷嘴111内部的孔隙流道,将来自于储液箱101中的液体以雾状的液滴形式喷洒出去。
22.结合图1至图5的示意,可见,机臂11围绕机身本体10布置,当机臂11上的电机带动桨叶转动时,容易在机身本体10正下方中间区域形成负压环境,导致第一喷嘴111喷洒出的液体向机身本体10正下方中间区域聚集。由于脚架12起到起落架的作用,连接在机身本体10下方。因而,可以借助于脚架12,在脚架12上开设出风口13,且沿偏航轴yaw的投影方向,将出风口13布置在桨叶围成的区域内。当出风口121向外吹风时,可以使得该区域内的负压效应得到弱化。
23.本技术实施例中,提供了一种多旋翼无人机,该多旋翼无人机的机臂上设置有与储液箱连通的第一喷嘴,在多旋翼无人机的脚架上开设有出风口,且沿偏航轴的投影方向,出风口位于多旋翼无人机的桨叶围成的区域内。因此,在桨叶围成的区域内,可以通过出风口输出气流,使桨叶转动形成的负压效应得以弱化,避免第一喷嘴喷洒出的液体过度聚集在桨叶围成的区域内,从而有助于改善液体喷洒的均匀性。
24.可选地,参照图6,所述脚架12包括第一支撑架121、第二支撑架122和空心连杆123;
25.所述第一支撑架121和所述第二支撑架122对称布置在横滚轴roll两侧,所述空心连杆123连接于所述第一支撑架121和所述第二支撑架122之间;
26.所述空心连杆123的表面开设有所述出风口13。
27.具体而言,如图6所示,一种实施方式中,该多旋翼无人机的脚架12可以包括第一支撑架121、第二支撑架122和空心连杆123。可以理解的是,横滚轴roll即多旋翼无人机头部和尾部的连线,绕横滚轴旋转的角度可以表示多旋翼无人机左右倾翻的程度。将第一支撑架121和第二支撑架122对称布置在横滚轴roll两侧,也即第一支撑架121和第二支撑架122分布在机身本体10的两侧,可以为多旋翼无人机提供平稳可靠的起落支撑。空心连杆123连接于第一支撑架121和第二支撑架122之间,也即意味着空心连杆123设置在机身本体10的正下方。在空心连杆123的表面开设出风口13,可以准确有效地将气流引导输出至机身本体10的正下方桨叶所围成的区域内。
28.可选地,参照图6,所述出风口13包括多个出风孔,多个所述出风孔沿俯仰轴pitch方向呈直线排列。
29.具体而言,一种实施方式中,上述布置在脚架12上的出风口13可以包括多个出风孔,出风孔的截面形状可以是圆形或者矩形等其它形状,具体可基于流体力学的优化分析确定。如图6所示,当多个出风孔设置于空心连杆123上时,由于空心连杆123的轴线与俯仰轴pitch平行,因此,多个出风孔可以沿着俯仰轴pitch方向呈直线排列,从而,多股气流从多个出风孔输出时,可以形成一道风屏或者风帘,增大气流的覆盖面积,进一步弱化负压效应,提升液体喷洒的均匀性
30.可选地,参照图6,多个所述出风孔等间距均匀布置。
31.具体而言,如图6所示,一种实施方式中,多个出风孔可以等间距均匀布置,以使得机身本体10的正下方桨叶所围成的区域内各处空间位置的负压弱化效果趋于一致。
32.可选地,所述出风口13包括沿俯仰轴pitch方向设置的条形缝隙。
33.具体而言,一种实施方式中,还可以在脚架12上开设条形缝隙作为出风口13,可以理解的是,条形缝隙相较于多个出风孔而言,其连续性更好,可以形成连续不间断的风屏或者风帘,可以减少风屏或者风帘的盲区,具有更佳的负压弱化效果。
34.可选地,参照图6,所述第一支撑架121和/或所述第二支撑架122开设有进风口14,所述进风口14与所述出风口13连通,所述进风口14的轴线与横滚轴roll平行。
35.具体而言,一种实施方式中,为了向出风口13提供弱化负压效应的气流,如图6所示,可以在第一支撑架121、第二支撑架122中一个或两个上开设进风口14,将进风口14与出风口13连通,可以理解的是,通过将进风口14的轴线与横滚轴roll平行设置,可以借助于多旋翼无人机自身飞行过程中与气流的相对运动,实现气流的输入,而无需借助于其它装置设备,结构简单有利于降低多旋翼无人机的负载。
36.可选地,参照图6,所述多旋翼无人机还包括汇流件15;
37.沿所述汇流件15的第一端至第二端,所述汇流件15的截面积逐渐变小;
38.所述汇流件15的第二端与所述进风口14连接。
39.具体而言,如图6所示,一种实施方式中,为了提高气流的收集性能,本技术实施例的多旋翼无人机还可以包括汇流件15,汇流件15为两端开口的筒状部件,沿汇流件15的第一端至第二端,汇流件15的截面积逐渐变小,也即汇流件15呈喇叭状或漏斗状。汇流件15开口较小的第二端与进风口14连接。从而,汇流件15开口较大的第一端朝向进风方向,可以收集更多气流,以保证风屏或者风帘的连续不断。
40.可选地,参照图6,所述进风口14对称布置在俯仰轴pitch两侧。
41.具体而言,一种实施方式中,为了使得多旋翼无人机无论在向前正向飞行时,或者在向后反向飞行时的负压效应均得到弱化,可以将进风口14对称布置在俯仰轴pitch两侧。如图6所示,可在第一支撑架121、第二支撑架122的前后两侧均设置进风口14,第一支撑架121、第二支撑架122的前后两侧即俯仰轴pitch的两侧。
42.可选地,所述多旋翼无人机还包括气体压缩装置;
43.所述气体压缩装置与所述出风口13连通。
44.具体而言,一种实施方式中,还可以在多旋翼无人机上配置压缩机、气泵一类的气体压缩装置,该气体压缩装置与出风口13连通。可以理解的是,气体压缩装置可以受控制系
统的操控。因而,相较于依赖自然进风出风的方案,这种方式中,出风口13的气流的可控性更强,例如,可以根据多旋翼无人机的飞行速度、喷洒系统的喷洒压力动态调整出风口13的气流。
45.可选地,参照图6,所述空心连杆123上设置有第二喷嘴16,所述第二喷嘴16与所述储液箱101连通。
46.具体而言,一种实施方式中,由于第一喷嘴111设置于机臂11上,机身本体10的正下方桨叶所围成的区域内为第一喷嘴111的喷洒盲区。如图6所示,为了消除该喷洒盲区,可以在空心连杆123上设置第二喷嘴16,将第二喷嘴16与储液箱101连通。储液箱101向第一喷嘴111和第二喷嘴16同时供应液体,可以实现更大面积的喷洒幅度。
47.可选地,参照图6,所述第二喷嘴16的数量为多个,多个所述第二喷嘴16与所述多个所述出风孔间隔设置。
48.具体而言,如图6所示,一种实施方式中,可以在空心连杆123上布置多个第二喷嘴16,第二喷嘴16与空心连杆123上的出风孔间隔设置,借助于出风孔气流的作用,有助于使得第二喷嘴16喷洒的液体更为均匀。
49.可选地,参照图1和图3,所述机臂11与俯仰轴pitch和横滚轴roll所在平面的夹角为锐角,且所述机臂11指向背离所述脚架12的一侧。
50.具体而言,一种实施方式中,还可以通过改变第一喷嘴111的喷射角度提高喷射幅度。具体地,如图1和图3所示,可保持机臂11与俯仰轴pitch和横滚轴roll所在平面的夹角为锐角,使机臂11指向背离脚架12的一侧,也即将机臂11相对于机身本体10斜向上倾斜,从而当四周桨叶转动时,在四周气流的作用下,从第一喷嘴111喷洒出的液滴更容易扩散,可以实现更大的喷洒幅度。
51.可选地,所述机臂11与所述机身本体10可转动地连接。
52.具体而言,一种实施方式中,为了提升该多旋翼无人机的运输便利性,可以将机臂11与机身本体10之间的连接结构设计为可转动地连接方式,当然,该可转动地连接方式可以自带自锁功能,即可以使机臂11相对于机身本体10保持在展开状态或者折叠状态。基于此,可以提高收纳便利性,降低第一喷嘴111被碰撞损坏的风险。
53.可选地,参照图1,所述多旋翼无人机还包括喷嘴连接杆17;
54.所述喷嘴连接杆17与所述机臂11可转动地连接,所述第一喷嘴111设置于所述喷嘴连接杆17的端部。
55.具体而言,如图1所示,一种实施方式中,当采用喷嘴连接杆17将第一喷嘴111间接地连接在机臂11上时,为了收纳运输便利,还可以将喷嘴连接杆17与机臂11可转动地连接。需要说明的是,喷嘴连接杆17与机臂11之间的可转动地连接方式也可以自带自锁功能,即可以使喷嘴连接杆17相对于机臂11保持在展开状态或者折叠状态。当需要收纳运输时,将喷嘴连接杆17相对于机臂11进行一次转动折叠,再将机臂11相对于机身本体10进行一次折叠,即可将多旋翼无人机的体积缩小,可以有效节省收纳空间。
56.以上所描述的装置实施例仅仅是示意性的,其中所述作为分离部件说明的单元可以是或者也可以不是物理上分开的,作为单元显示的部件可以是或者也可以不是物理单元,即可以位于一个地方,或者也可以分布到多个网络单元上。可以根据实际的需要选择其中的部分或者全部模块来实现本实施例方案的目的。本领域普通技术人员在不付出创造性
的劳动的情况下,即可以理解并实施。
57.应理解,说明书通篇中提到的“一个实施例”或“一实施例”意味着与实施例有关的特定特征、结构或特性包括在本技术的至少一个实施例中。因此,在整个说明书各处出现的“在一个实施例中”或“在一实施例中”未必一定指相同的实施例。此外,这些特定的特征、结构或特性可以任意适合的方式结合在一个或多个实施例中。
58.在此处所提供的说明书中,说明了大量具体细节。然而,能够理解,本技术的实施例可以在没有这些具体细节的情况下被实践。在一些实例中,并未详细示出公知的方法、结构和技术,以便不模糊对本说明书的理解。
59.在权利要求中,不应将位于括号之间的任何参考符号构造成对权利要求的限制。单词“包含”不排除存在未列在权利要求中的元件或步骤。位于元件之前的单词“一”或“一个”不排除存在多个这样的元件。本技术可以借助于包括有若干不同元件的硬件以及借助于适当编程的计算机来实现。在列举了若干装置的单元权利要求中,这些装置中的若干个可以是通过同一个硬件项来具体体现。单词第一、第二、以及第三等的使用不表示任何顺序。可将这些单词解释为名称。
60.最后应说明的是:以上实施例仅用以说明本技术的技术方案,而非对其限制;尽管参照前述实施例对本技术进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本技术各实施例技术方案的范围。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。