1.本发明涉及机器人技术领域,具体为一种具有自动上下料功能的工业机器人。
背景技术:
2.目前,机器人是自动执行工作的机器装置,它既可以接受人类指挥,又可以运行预先编排的程序,也可以根据以人工智能技术制定的原则纲领行动,它的任务是协助或取代人类工作的工作
3.参考专利号为cn216707496u的自动上下料机器,具体为自动上下料机器人,包括底座,所述底座的底部设有多个滚轮,所述底座的侧面设有对底座进行固定的固定组件,所述底座的表面设有呈竖直设置支撑架,所述支撑架通过升降组件连接有固定架,所述固定架通过平移组件连接有固定块,所述固定块固定连接有固定框,所述固定框内部设有对物品进行夹持的夹持组件;本装置在底座的底部设有滚轮,通过滚轮的设置方便该装置移动,当该装置在上下料时,通过固定组件对底座进行固定,从而有效的提高了该装置在上下料时的稳定性能;
4.该专利在进行上下料夹持的时候,遇到物件表面与夹持结构表面存在灰尘的情况时,容易出现在夹持后出现移动时的晃动时,夹持结构与物件夹紧之间的小颗粒残渣因为自身的滚动,而导致较重的物件夹持的松动甚至脱落。因此,设计实用性强的一种具有自动上下料功能的工业机器人是很有必要的。
技术实现要素:
5.本发明的目的在于提供一种具有自动上下料功能的工业机器人,以解决上述背景技术中提出的问题。
6.为了解决上述技术问题,本发明提供如下技术方案:一种具有自动上下料功能的工业机器人,包括连接板,所述连接板底部通过滑槽滑动连接有滑动夹板,所述滑动夹板外壁固定连接有橡胶条,所述滑动夹板内部设置有清理防松动机构;
7.所述清理防松动机构包括滑板,所述滑板外壁与滑动夹板内壁滑动连接,所述滑板外壁与弹簧一端固定连接,所述弹簧另一端与滑动夹板内壁固定连接,所述滑板外壁开设有方形槽,所述方形槽内壁转动连接有长转轴,所述长转轴外壁固定连接有开合刮板,所述开合刮板外壁与橡胶条外壁接触,所述方形槽内壁固定连接有长磁板,所述滑板顶部开设有收集槽,所述收集槽内部设置有推散吹风清洁机构;
8.所述推散吹风清洁机构包括连通气槽,所述收集槽内壁固定连接有固定块,所述滑板与固定块内部开设有连通气槽,所述固定块外壁固定连接有伸缩杆,所述伸缩杆一端固定连接有刮块。
9.根据上述技术方案,所述推散吹风清洁机构还包括橡胶弹性绳,所述橡胶弹性绳一端与固定块外壁固定连接,所述橡胶弹性绳另一端与刮块外壁固定连接,刮块内部开设有喷气孔。
10.根据上述技术方案,所述喷气孔内部与伸缩杆内部连通,所述伸缩杆内根据上述技术方案,所述伸缩杆内部为空心状态。
11.根据上述技术方案,所述开合刮板与长磁板相对一侧的磁性为同极相斥。
12.根据上述技术方案,所述收集槽内壁为v字型。
13.根据上述技术方案,所述滑板为倾斜设置。
14.与现有技术相比,本发明所达到的有益效果是:
15.(1)、本发明通过设置清理防松动机构,在两个滑动夹板相互靠近并且与物件接触时,滑动夹板内壁的滑板先与物件接触,并且随着滑动夹板的推动,从而滑板被推动向滑动夹板内壁滑动并且挤压弹簧使其发生形变,同时因为滑板与滑动夹板内壁为倾斜的形态,所以在滑板被挤压推入滑动夹板内壁的时候,滑板与物件接触的位置则会在物件表面开始滑动上升,通过多个滑板对物件表面进行滑动刮擦清洁,将物件表面残存的灰尘刮擦清洁至滑板表面开设的收集槽处,对灰尘进行收集的同时,对物件表面清洁,防止灰尘粘附而导致滑板被推入滑动夹板内部后通过滑动夹板外壁的橡胶条进行夹紧时,橡胶条与物件之间的颗粒灰尘在移动物件时发生滚动而出现物件松动的问题发生。
16.(2)、本发明通过设置清理防松动机构,在滑板被推入滑动夹板内壁挤压弹簧形变后,滑板表面开设的方形槽中的长转轴与上的开合刮板,则会因为滑板收入滑动夹板内壁的这个过程中,开合刮板顶部与橡胶条外壁的下方滑动至橡胶条外壁的上方,并随着滑板的继续推入滑动夹板内壁,开合刮板与长转轴的位置处则触碰至滑动夹板的外壁并且被滑动夹板外壁拨动,开合刮板带动长转轴在方形槽内壁旋转开始闭合至方形槽处,而在滑板处于滑动夹板外部伸出的时候,开合刮板通过与长磁板之间的同极相斥的力推动开合刮板始终紧贴橡胶条外壁,并且可以随着滑板推入滑动夹板内部,实现对橡胶条外壁的由下而上的滑动刮擦,对橡胶条外壁进行一次清洁,使得橡胶条外壁不会因为之前对物件夹持时粘附残渣,而导致此次的夹持摩擦力下降的情况出现。
17.(3)、本发明通过设置推散吹风清洁机构,在滑板被推入滑动夹板内壁的时候,滑板与滑动夹板内壁之间的空气则通过滑板内部开设的连通气槽穿过固定块内部进入伸缩杆中,因为伸缩杆为多节空心形态,所以空气进入伸缩杆后,伸缩杆的多节开始被空气推动快速的伸开,推动刮块快速的从收集槽内壁的固定块两侧推出,将收集槽表面长时间工作而收集的灰尘与残渣进行高效的推出至滑板外部,实现对收集槽内壁的自清洁效果。
18.(4)、本发明通过设置推散吹风清洁机构,滑动夹板内壁的空间较大,伸缩杆需要膨胀伸开的所需空气量较少,所以空气被推动先快速的进入伸缩杆中并且推开伸缩杆拉伸至最大化将刮块推出后,多余的空气再缓缓的通过喷气孔外壁喷气孔对外喷出,实现对收集槽内壁的刮擦同时进行吹气,将刮擦粘附在刮块外壁与残存在收集槽内部的灰尘对滑板两侧位置吹出,实现对收集槽与刮块外壁的进一步清洁效果,并且通过刮块推动至收集槽内壁的两侧,再将其快速吹出,避免了灰尘清理出去时粘附在物件表面的问题发生,实现对物件的清洁同时也防止灰尘再次粘附在物件表面,保证了对物件夹持时的摩擦力不受灰尘的影响。
附图说明
19.附图用来提供对本发明的进一步理解,并且构成说明书的一部分,与本发明的实
施例一起用于解释本发明,并不构成对本发明的限制。在附图中:
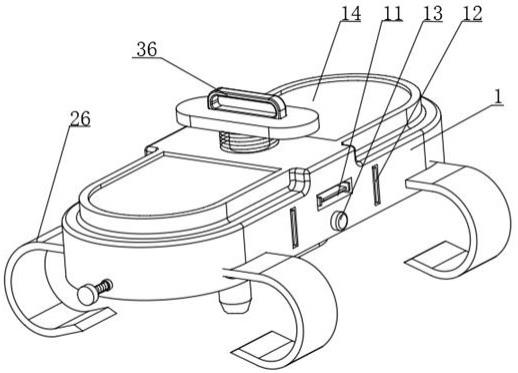
20.图1是本发明的整体原理示意图;
21.图2是本发明夹板的结构示意图;
22.图3是本发明清理防松动机构的结构示意图;
23.图4是本发明图3的a处放大图;
24.图5是本发明连通气槽的结构示意图;
25.图6是本发明推散吹风清洁机构的结构示意图
26.图中:1连接板、2滑动夹板、3清理防松动机构、301滑板、302弹簧、304开合板刮板、305长转轴、306方形槽、307长磁板、308收集槽、4推散吹风清洁机构、401连通气槽、402固定块、403伸缩杆、404橡胶弹性绳、405刮块、406喷气孔、5橡胶条。
具体实施方式
27.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
28.请参阅图1-6,本发明提供技术方案:一种具有自动上下料功能的工业机器人,包括连接板1,连接板1底部通过滑槽滑动连接有滑动夹板2,滑动夹板2外壁固定连接有橡胶条5,滑动夹板2内部设置有清理防松动机构3;
29.清理防松动机构3包括滑板301,滑板301外壁与滑动夹板2内壁滑动连接,滑板301外壁与弹簧302一端固定连接,弹簧302另一端与滑动夹板2内壁固定连接,滑板301外壁开设有方形槽306,方形槽306内壁转动连接有长转轴305,长转轴305外壁固定连接有开合刮板304,开合刮板304外壁与橡胶条5外壁接触,方形槽306内壁固定连接有长磁板307,滑板301顶部开设有收集槽308,收集槽308内部设置有推散吹风清洁机构4;
30.推散吹风清洁机构4包括连通气槽401,收集槽308内壁固定连接有固定块402,滑板301与固定块402内部开设有连通气槽401,固定块402外壁固定连接有伸缩杆403,伸缩杆403一端固定连接有刮块405。
31.推散吹风清洁机构4还包括橡胶弹性绳404,橡胶弹性绳404一端与固定块402外壁固定连接,橡胶弹性绳404另一端与刮块405外壁固定连接,刮块405内部开设有喷气孔406。
32.喷气孔406内部与伸缩杆403内部连通,伸缩杆403内部与连通气槽401内部连通。
33.伸缩杆403内部为空心状态。
34.开合刮板304与长磁板307相对一侧的磁性为同极相斥。
35.收集槽308内壁为v字型。
36.滑板301为倾斜设置;
37.在使用时,通过机器人控制连接板1底部的两个滑动夹板2进行相互靠近,对物体的夹紧,夹紧后到指定位置后松开两个滑动夹板2放下,实现自动上下料的效果;
38.而在两个滑动夹板2相互靠近并且与物件接触时,滑动夹板2内壁的滑板301先与物件接触,并且随着滑动夹板2的推动,从而滑板301被推动向滑动夹板2内壁滑动并且挤压弹簧302使其发生形变,同时因为滑板301与滑动夹板2内壁为倾斜的形态,所以在滑板301
被挤压推入滑动夹板2内壁的时候,滑板301与物件接触的位置则会在物件表面开始滑动上升,通过多个滑板301对物件表面进行滑动刮擦清洁,将物件表面残存的灰尘刮擦清洁至滑板301表面开设的收集槽308处,对灰尘进行收集的同时,对物件表面清洁,防止灰尘粘附而导致滑板301被推入滑动夹板2内部后通过滑动夹板2外壁的橡胶条5进行夹紧时,橡胶条5与物件之间的颗粒灰尘在移动物件时发生滚动而出现物件松动的问题发生;
39.而在滑板301被推入滑动夹板2内壁挤压弹簧302形变后,滑板301表面开设的方形槽306中的长转轴305与上的开合刮板304,则会因为滑板301收入滑动夹板2内壁的这个过程中,开合刮板304顶部与橡胶条5外壁的下方滑动至橡胶条5外壁的上方,并随着滑板301的继续推入滑动夹板2内壁,开合刮板304与长转轴305的位置处则触碰至滑动夹板2的外壁并且被滑动夹板2外壁拨动,开合刮板304带动长转轴305在方形槽306内壁旋转开始闭合至方形槽306处,而在滑板301处于滑动夹板2外部伸出的时候,开合刮板304通过与长磁板307之间的同极相斥的力推动开合刮板304始终紧贴橡胶条5外壁,并且可以随着滑板301推入滑动夹板2内部,实现对橡胶条5外壁的由下而上的滑动刮擦,对橡胶条5外壁进行一次清洁,使得橡胶条5外壁不会因为之前对物件夹持时粘附残渣,而导致此次的夹持摩擦力下降的情况出现;
40.并且在滑板301被推入滑动夹板2内壁的时候,滑板301与滑动夹板2内壁之间的空气则通过滑板301内部开设的连通气槽401穿过固定块402内部进入伸缩杆403中,因为伸缩杆403为多节空心形态,所以空气进入伸缩杆403后,伸缩杆403的多节开始被空气推动快速的伸开,推动刮块405快速的从收集槽308内壁的固定块402两侧推出,将收集槽308表面长时间工作而收集的灰尘与残渣进行高效的推出至滑板301外部,实现对收集槽308内壁的自清洁效果;
41.因为滑动夹板2内壁的空间较大,伸缩杆403需要膨胀伸开的所需空气量较少,所以空气被推动先快速的进入伸缩杆403中并且推开伸缩杆403拉伸至最大化将刮块405推出后,多余的空气再缓缓的通过喷气孔406外壁喷气孔406对外喷出,实现对收集槽308内壁的刮擦同时进行吹气,将刮擦粘附在刮块405外壁与残存在收集槽308内部的灰尘对滑板301两侧位置吹出,实现对收集槽308与刮块405外壁的进一步清洁效果,并且通过刮块405推动至收集槽308内壁的两侧,再将其快速吹出,避免了灰尘清理出去时粘附在物件表面的问题发生,实现对物件的清洁同时也防止灰尘再次粘附在物件表面,保证了对物件夹持时的摩擦力不受灰尘的影响。
42.需要说明的是,在本文中,诸如第一和第二等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。而且,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。
43.最后应说明的是:以上所述仅为本发明的优选实施例而已,并不用于限制本发明,尽管参照前述实施例对本发明进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的
保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。