结合rfid读码器、二维码定位和双自由度夹手的悬臂机械手
技术领域
1.本实用新型涉及悬臂机械手技术领域,具体涉及结合rfid读码器、二维码定位和双自由度夹手的悬臂机械手。
背景技术:
2.rfid是一种无线通信技术,可以利用无线射频方式对记录媒体(电子标签或射频卡)进行读写并获得相关数据。这项技术已被广泛的应用在物料管理,分拣系统,仓储物流等一系列商业用途中,其中也涉及基因保藏库,由于基因保藏库对湿度控制要求严格,而人员的进入将导致环境湿度增加,因而未来基因保藏库发展趋势倾向于使用自动化保藏设备,以悬臂机械手代替人员去存、取种质保藏资源。针对现有技术存在以下问题:
3.1、基因种子资源位于种子瓶中,装载在36孔种子篮中,每个种子篮带有rfid编号标签,人工清点基因种子费时费力,且无法精确找到单独编号种子;
4.2、传统夹手的悬臂机械手不能多角度的进行移动夹取,导致降低工作效率。
技术实现要素:
5.本实用新型提供结合rfid读码器、二维码定位和双自由度夹手的悬臂机械手,以解决上述背景技术中提出的问题。
6.为解决上述技术问题,本实用新型所采用的技术方案是:
7.结合rfid读码器、二维码定位和双自由度夹手的悬臂机械手,包括立柱,所述立柱的顶部固定连接有定轨,所述定轨的顶部活动连接有动轨,所述动轨的一侧活动连接有悬臂机械手本体,所述悬臂机械手本体包括机械臂架,所述机械臂架的内部设置有第一伸缩杆,所述第一伸缩杆的一端固定连接有移动板,所述悬臂机械手本体的外面活动安装有活动架环,所述移动板的一端延伸至悬臂机械手本体的外部且与活动架环的一侧活动连接;
8.所述活动架环的外表面设置有识别摄像头,所述识别摄像头的一侧设置有定位二维码读码器,所述定位二维码读码器的一端与活动架环的外表面固定连接,所述活动架环的底部两侧设置有夹手,所述夹手的一侧设置有双向伸缩杆,所述双向伸缩杆的一侧与活动架环的底部固定连接。
9.本实用新型技术方案的进一步改进在于:所述动轨的一端固定连接有第一伺服电机,所述定轨的顶部开设有第一移动槽,所述第一伺服电机的输出轴延伸至第一移动槽的内部,一个所述第一移动槽的内表面固定连接有第一齿条,另一所述第一移动槽的内部活动连接有移动块,所述移动块的一侧与动轨的一端固定连接,所述第一伺服电机输出轴的外表面固定连接有第一齿轮,所述第一齿条与第一齿轮相互啮合。
10.采用上述技术方案,该方案中的移动块便于提高动轨的移动效率。
11.本实用新型技术方案的进一步改进在于:一个所述第一移动槽的内表面开设有稳固槽,所述稳固槽的内部活动连接有稳固块,所述稳固块的一端与移动块的一侧固定连接,所述移动块的底部活动连接有滑轮。
12.采用上述技术方案,该方案中的稳固槽与稳固块便于提高动轨移动时的稳定性,滑轮便于减少移动块与第一移动槽的摩擦力,从而提高移动块的移动效率。
13.本实用新型技术方案的进一步改进在于:所述动轨的顶部开设有第二移动槽,所述动轨的顶部活动连接有移动座,所述移动座的一侧与悬臂机械手本体的一侧固定连接,所述移动座的顶部固定连接有第二伺服电机,所述第二伺服电机的输出轴延伸至第二移动槽的内部,所述第二移动槽的内壁固定连接有第二齿条,所述第二伺服电机输出轴的一端固定连接有第二齿轮,所述第二齿轮与第二齿条相互啮合。
14.采用上述技术方案,该方案中的移动座便于带动悬臂机械手本体同步运动。
15.本实用新型技术方案的进一步改进在于:所述第二移动槽的两侧开设有滑槽,所述滑槽的内部活动安装有l型连接块,所述l型连接块的一端与移动座的底部固定连接。
16.采用上述技术方案,该方案中的l型连接块便于提高第二伺服电机的稳定性,并将其动能均匀传输至第二齿轮和第二齿条。
17.本实用新型技术方案的进一步改进在于:所述活动架环的内表面固定连接有第二伸缩杆,所述第二伸缩杆的一端与夹手的一侧固定连接,所述夹手的一侧开设有凹槽,所述凹槽的内部活动安装有限位块,所述限位块的一端固定连接有弧形夹板,所述弧形夹板的内表面固定连接有凸块,所述凹槽的内壁固定连接有压力块。
18.采用上述技术方案,该方案中的第二伸缩杆便于带动夹手伸出并对种子篮进行夹持,同时通过双向伸缩杆防止取出篮子的同时不会移动。
19.由于采用了上述技术方案,本实用新型相对现有技术来说,取得的技术进步是:
20.1、本实用新型提供结合rfid读码器、二维码定位和双自由度夹手的悬臂机械手,采用定位二维码读码器和识别摄像头的配合,依次对rfi d编号标签进行识别,确定种子篮的位置,同时对种子篮进行清点,并通过第一伺服电机带动第一齿轮转动,和第二伺服电机带动第二齿轮转动,同步带动悬臂机械手本体对基因种子篮实现精确抓取,解决了人工清点基因种子费时费力,且无法精确找到单独编号种子的问题,达到了便于清点基因种子,精确定位单独编号种子的效果。
21.2、本实用新型提供结合rfid读码器、二维码定位和双自由度夹手的悬臂机械手,采用双向伸缩杆和第一伸缩杆的配合,第一伸缩杆带动活动架环移动时合适高度,并使第二伸缩杆将夹手推出,通过双向伸缩杆对种子篮两边扣手进行夹持,并向篮身缩紧,在取出篮子的同时保证篮子不会移动,同时通过凸块和压力块提高夹取过程中的稳定性,解决了传统夹手的悬臂机械手不能多角度的进行移动夹取,导致降低工作效率的问题,达到了便于多角度夹取,提高工作效率的效果。
附图说明
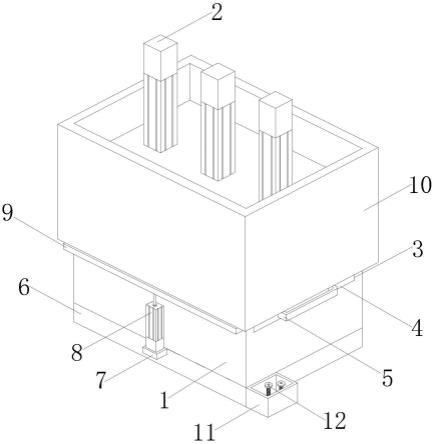
22.图1为本实用新型的结构示意图;
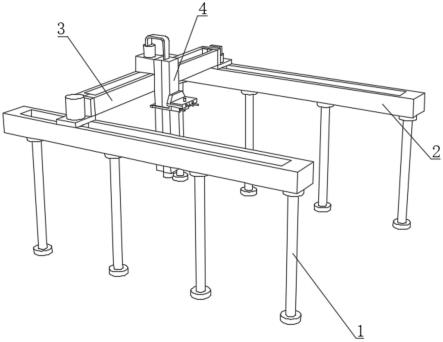
23.图2为本实用新型的剖视结构示意图;
24.图3为本实用新型的活动架环结构示意图;
25.图4为本实用新型的夹手结构示意图。
26.图中:1、立柱;2、定轨;3、动轨;4、悬臂机械手本体;
27.21、第一移动槽;22、第一齿条;23、移动块;24、稳固槽;25、稳固块;26、滑轮;
28.31、第一伺服电机;32、第一齿轮;33、第二移动槽;34、移动座;35、第二伺服电机;36、第二齿条;37、第二齿轮;38、滑槽;39、l型连接块;
29.41、机械臂架;42、第一伸缩杆;43、移动板;44、活动架环;45、识别摄像头;46、定位二维码读码器;47、夹手;48、双向伸缩杆;49、第二伸缩杆;
30.471、凹槽;472、限位块;473、弧形夹板;474、凸块;475、压力块。
具体实施方式
31.下面结合实施例对本实用新型做进一步详细说明:
32.实施例1
33.如图1-4所示,本实用新型提供了结合rfid读码器、二维码定位和双自由度夹手的悬臂机械手,包括立柱1,立柱1的顶部固定连接有定轨2,定轨2的顶部活动连接有动轨3,动轨3的一侧活动连接有悬臂机械手本体4,悬臂机械手本体4包括机械臂架41,机械臂架41的内部设置有第一伸缩杆42,第一伸缩杆42的一端固定连接有移动板43,悬臂机械手本体4的外面活动安装有活动架环44,移动板43的一端延伸至悬臂机械手本体4的外部且与活动架环44的一侧活动连接,活动架环44的外表面设置有识别摄像头45,识别摄像头45的一侧设置有定位二维码读码器46,定位二维码读码器46的一端与活动架环44的外表面固定连接,活动架环44的底部两侧设置有夹手47,夹手47的一侧设置有双向伸缩杆48,双向伸缩杆48的一侧与活动架环44的底部固定连接,活动架环44的内表面固定连接有第二伸缩杆49,第二伸缩杆49的一端与夹手47的一侧固定连接,夹手47的一侧开设有凹槽471,凹槽471的内部活动安装有限位块472,限位块472的一端固定连接有弧形夹板473,弧形夹板473的内表面固定连接有凸块474,凹槽471的内壁固定连接有压力块475。
34.在本实施例中,凸块474设置有多个均匀分布在弧形夹板473的内表面,当第二伸缩杆49带动夹手47进行运动,并在活动架环44的底部两侧伸出,通过双向伸缩杆48对种子篮两边扣手进行夹持,并向篮身缩紧,同时使凸块474充分与篮身接触,提高其接触面积,防止在夹持收取的过程中晃动。
35.实施例2
36.如图1-4所示,在实施例1的基础上,本实用新型提供一种技术方案:优选的,动轨3的一端固定连接有第一伺服电机31,定轨2的顶部开设有第一移动槽21,第一伺服电机31的输出轴延伸至第一移动槽21的内部,一个第一移动槽21的内表面固定连接有第一齿条22,另一第一移动槽21的内部活动连接有移动块23,移动块23的一侧与动轨3的一端固定连接,第一伺服电机31输出轴的外表面固定连接有第一齿轮32,第一齿条22与第一齿轮32相互啮合,一个第一移动槽21的内表面开设有稳固槽24,稳固槽24的内部活动连接有稳固块25,稳固块25的一端与移动块23的一侧固定连接,移动块23的底部活动连接有滑轮26。
37.在本实施例中,稳固槽24的内径值与稳固块25的外径值相互适配,第一伺服电机31带动第一齿轮32转动,并挤压第一齿条22,从而带动动轨3在第一移动槽21的范围进行移动,并同步带动稳固块25在稳固槽24的范围内运动,提高动轨3的移动效率,同时通过滑轮26减少移动块23与第一移动槽21的摩擦力,从而提高移动块23的移动效率。
38.实施例3
39.如图1-4所示,在实施例1的基础上,本实用新型提供一种技术方案:优选的,动轨3
的顶部开设有第二移动槽33,动轨3的顶部活动连接有移动座34,移动座34的一侧与悬臂机械手本体4的一侧固定连接,移动座34的顶部固定连接有第二伺服电机35,第二伺服电机35的输出轴延伸至第二移动槽33的内部,第二移动槽33的内壁固定连接有第二齿条36,第二伺服电机35输出轴的一端固定连接有第二齿轮37,第二齿轮37与第二齿条36相互啮合,第二移动槽33的两侧开设有滑槽38,滑槽38的内部活动安装有l型连接块39,l型连接块39的一端与移动座34的底部固定连接。
40.在本实施例中,滑槽38相对设置,第二伺服电机35带动第二齿轮37挤压第二齿条36,从而使移动座34带动悬臂机械手本体4进行运动,并使移动座34带动l型连接块39在滑槽38内进行同步运动,充分提高悬臂机械手本体4移动时的稳定性。
41.下面具体说一下该结合rfid读码器、二维码定位和双自由度夹手的悬臂机械手的工作原理。
42.如图1-4所示,定位二维码读码器46与识别摄像头45对基因种子篮带上的rfid编号标签进行识别,通过第一伺服电机31带动第一齿轮32转动,并挤压第一齿条22,从而带动动轨3在第一移动槽21的范围进行移动,第二伺服电机35带动第二齿轮37挤压第二齿条36,从而使移动座34带动悬臂机械手本体4进行运动,实现多角度运动,使第二伸缩杆49带动夹手47进行运动,并在活动架环44的底部两侧伸出,通过双向伸缩杆48对种子篮两边扣手进行夹持,并向篮身缩紧,对基因种子篮实现精确抓取,同时起到盘点种子篮作用。
43.上文一般性的对本实用新型做了详尽的描述,但在本实用新型基础上,可以对之做一些修改或改进,这对于技术领域的一般技术人员是显而易见的。因此,在不脱离本实用新型思想精神的修改或改进,均在本实用新型的保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。