便于老人训练和治疗的治疗机器人
1.相关申请的交叉引用
2.本技术要求于2020年2月17日提交的美国临时专利申请第62/977,499号的权益,该申请的全部内容通过引用并入本文。
技术领域
3.本公开总体涉及一种互动式治疗机器人,特别地,该治疗机器人可以便于对老人和患有各种神经疾病的其他患者进行各种训练和非药物治疗。
背景技术:
4.世界卫生组织(“who”)报告指出,全球60岁以上人口将从2015年的9亿迅速增长到2050年的20亿[1],认知障碍症人口也将从4680万急剧增加到1.315亿[2]。随着认知障碍症的发展,患者越来越难以独立完成日常活动。他们越来越健忘,并且用语言表达自己也有困难。空间和时间两者的定向能力也在退化,并且他们的个性可能会改变。因此,良好的护理质量以及情感和社会支持非常重要。最终,患者需要被收容治疗。到2030年,全球认知障碍症护理将大幅达到2万亿美元,相当于世界第18大经济体[2]、[3]。目前没有治愈或有效的方法来减缓认知障碍症的发展,但有药物治疗和非药物治疗两者可以减轻患者的症状。令人惊讶的是,十多年来没有新药被开发出来[4]。非药物干预意图延缓心智能力退化。它帮助患者在日常生活中保持更加独立,并且改善他们的福利和生活质量。记忆和定向练习、艺术疗法、芳香疗法、音乐疗法和动物辅助疗法是常见的非药物干预。这可能包括对家庭成员的护理者训练,以支持训练和治疗。具体而言,非药物干预可分为三种类型,包括(1)认知疗法;(2)身体、情感、社会刺激;以及(3)面向情感的干预[5]。
[0005]
认知疗法是总括术语,是指与个人的心智能力相关的所有活动,诸如感知、思考和记住。例如,涉及一系列数字的算术题、习题都要完成,或图像必须被记住和识别。一些练习还涉及单词和谜题。练习购物等日常活动的人也是一种干预。这些练习以一对一或小组形式提供,持续30分钟到90分钟,每周重复1次到2次。现实定向训练是另一个广泛使用的干预,意图通过反复向阿尔茨海默病患者提供姓名、日期或时间等基本信息来帮助改善人们的空间和时间定向。认知干预可以有效提高心智表现。然而,尚不清楚这些干预是否改善了患者的情绪或他们护理自己的能力。如果他们不能重复完成练习,那可能会非常令人沮丧。现实定向训练可能会有太多的重复,使他们感到更加困惑和被光顾[6]。
[0006]
身体、情感、社会刺激是促进身体和社会活动的干预。它侧重于不同类型的活动,包括提高力量、耐力和平衡的体育活动。其他实践活动,诸如刷牙、写信、与他人一起做饭、表演艺术和音乐,以及和各种主题的讨论组[7],也可以作为训练的一部分布置。
[0007]
面向情感的干预侧重于患者的感受、价值观和经历,以便改善他们的生活质量。验证疗法是一个示例。它意图让患者感到被理解、安全和舒适。护理者在与患者互动时使用特殊的沟通技巧来营造亲密和护理的氛围。护理者不判断患者的行为,并且接受他们和他们的感受。回忆疗法是另一个常见的示例,可以在个人或群体环境中进行。鼓励患者谈论诸如
他们的家乡、学校生活或工作的话题。目的是改善他们的心智能力、情绪和心智表现,并且减轻诸如抑郁的心理影响[8]。
[0008]
除了非药物干预外,还有其他方法,包括反射疗法[9]、饮食疗法[10]和芳香疗法[11]。大多数上述干预都是非常劳动密集型的。尽管可以分组进行,但要带动和引导老人参与,还是需要很大的努力。鉴于对老人支持的需求日益增加,分配给每个老人的资源非常有限。
[0009]
动物辅助疗法是一种在老年护理环境中发现的娱乐疗法。自20世纪60年代以来,它一直在美国使用。它减少了抑郁症状和焦虑,并且给人总体积极的体验[12]、[13]。然而,合适动物的有限可用性以及卫生和安全问题是主要的限制和顾虑[14]。随着机器人技术的进步,机器人和治疗性宠物机器人逐渐成为可行的替代方案。
[0010]
医疗机器人领域的深入研究已经在世界各地兴起。这些研究通常侧重于探索机器人,并且为老人和患有认知障碍症和残疾的人使用机器人[15]。机器人(包括机器人海豹)已被用作替代方案(诸如动物辅助疗法),以促进老人护理设施中老人的健康和社会福利。特别是,paro机器人海豹是已经被广泛使用的社会响应机器人。它对个人如何被对待的方式做出响应。它已被证明能改善与社交、认知或情感孤立的老人的联系[16]使得改善情感状态,减少挑战性行为和社会互动[15]。然而,可用性和高成本阻碍了大规模实现。
[0011]
玩偶疗法是另一个被广泛接受的替代方案。它意图减少被收容治疗的认知障碍症患者的行为和心理障碍。它通常用作集成到长期护理机构环境中的护理工具,该长期护理机构需要找到解决其居民的认知、行为和情感问题的方法。据报道,玩偶疗法在促进和维持晚期认知障碍症患者依恋-护理的情感-关系维度和探索的注意维度方面是有效的。它还示出了与周围世界相关的能力的显著提高[17]。
[0012]
尽管此疗法帮助恢复早期为人父母的快乐记忆,并且让老人感到被需要和有用,但仍有一些人犹豫不决。一些家庭发现他们年老的父母被当作孩子一样对待而感到不安。这也被称为玩偶疗法贬低和光顾。其他人发现他们的年老的父母护理玩偶并且觉得它复制了定心丸,掩盖了行为问题[18]。其他一些老人发现玩偶对他们没有吸引力,并且忽略了玩偶。
[0013]
然而,大多数用于老人的玩偶都没有主动和互动功能。这些玩偶通常被设计成具有无组织的互动序列,没有任何预设的控制内容和互动主题,使得玩偶疗法难以具有针对特定群体或个人定制的准确、可测量的结果。此外,没有玩偶或机器人是设计来和老人一起玩的。对于患有失语症的老人,使用临床认知障碍症评定量表(cdr-sb)和简易心智状态检查(mmse)来评估他们的技能甚至更困难。应开发更多针对特定任务和定制的评估系统。迫切需要开发一种机器人玩偶来克服这些障碍,以促进老人的心智健康。
[0014]
因此,在本领域中需要互动式治疗机器人,其可以实现对老人(特别是对患有认知障碍症、失语症和其他心智残疾的老人)的群体或个人训练和/或治疗。此外,结合附图和本公开的背景技术,从随后的具体实施方式和所附权利要求,其他期望的特征和特性将变得显而易见。
技术实现要素:
[0015]
本发明提供了一种互动式治疗机器人,其可以便于老人进行各种训练和治疗。本
公开的目的是提供了一种治疗机器人,其可以实现对老人,特别是患有认知障碍症、失语症和其他心智残疾的老人的群体或个人训练和/或治疗。
[0016]
根据本公开的某些实施例,提供了一种治疗机器人,用于便于用户的训练和非药物治疗,向老人提供个性化训练,并且提供与用户的主题互动。治疗机器人包括躯干、可相对于躯干枢转的两个或更多个肢体部段以及微控制器单元。每个单独的肢体部段包括一个或多个加速度计或陀螺仪,该一个或多个加速度计或陀螺仪被配置为检测单独的肢体部段相对于躯干的移动。微控制器单元被配置为向用户提供指令,接收来自一个或多个加速度计或陀螺仪的信号,并且触发作为激励程序的实时反馈的执行,用于便于用户遵循指令并移动两个或更多个肢体部段。
[0017]
优选地,实时反馈包括向用户提供至少音频提示、灯效、振动效果或其任意组合。
[0018]
优选地,微控制器单元被配置为可以与加速度计或陀螺仪通信,以在基于规则的分析过程的基础上来确定有效互动,并且触发对用户的实时反馈,用于鼓励用户继续移动两个或更多个肢体部段,或与治疗机器人互动。
[0019]
优选地,基于规则的分析过程通过满足预限定任务的一个或多个标准来实时确定从信号识别的事件是否与预限定任务相关联。
[0020]
在再一个实施例中,治疗机器人包括可以与计算机设备通信的网络模块,该计算机设备被配置为创建、设计和管理预限定任务,并且接收信号,用于基于接收到的信号生成评估用户的认知领域的评估报告。
[0021]
根据本公开的再一个方面,治疗机器人包括具有扬声器模块和音频记录器的语音能力跟踪系统。扬声器模块被配置为可听地广播预先记录的音频,提示用户在主题互动期间做出响应,其中预先记录的音频包括用户熟悉的人的语音。音频记录器被配置为响应于预先记录的音频来记录用户的音频信息,其中音频信息被上传到计算机设备,用于识别用户产生的独特的单词或声音,并且确定用户是否患有与失语症、语言障碍、构音障碍或其他神经疾病相关联的病症。
[0022]
根据本公开的再一个方面,治疗机器人包括:头部部段;多个压力传感器,其被配置为检测用户与头部部段和两个或更多个肢体部段的互动;以及微控制器单元,其被配置为向用户提供指令、接收来自多个压力传感器的信号并且触发作为激励程序的实时反馈的执行,用于用户遵循指令并且与治疗机器人互动。
[0023]
优选地,多个压力传感器包括:一个或多个头部压力传感器,其被配置为检测对头部部段的按压;以及一个或多个肢体压力传感器,其在每个单独的肢体部段上,该一个或多个肢体压力传感器被配置为检测对单独的肢体部段的按压。
[0024]
优选地,多个压力传感器包括位于躯干的背面的背压传感器,该背压传感器被配置为检测治疗机器人的打嗝(burp)。
[0025]
根据本公开的再一个方面,治疗机器人包括多个磁场传感器,该多个磁场传感器被配置为检测来自外部附件的外部磁场,并且微控制器单元被配置为向用户提供指令,接收来自多个磁场传感器的信号,并且触发实时反馈的执行,作为激励程序,用于用户遵循指令并且相对于治疗机器人移动外部附件。
[0026]
优选地,该多个磁场传感器包括:一个或多个肢体霍尔传感器,其在每个个人肢体部段上,该一个或多个肢体霍尔传感器被配置为检测接近个人肢体部段的外部磁场;以及
一个或多个躯干霍尔传感器,其被配置为检测接近躯干的外部磁场。
[0027]
在一个实施例中,外部附件是可移除地附接到该治疗机器人的衣服,其中该衣服包括一个或多个磁体,用于致动该多个磁场传感器,以确定该衣服是否正确地穿在该治疗机器人上。
[0028]
优选地,衣服包括导电织物,用于致动多个磁场传感器,用于检测用户触摸的衣服上的精确位置。
[0029]
优选地,多个磁场传感器包括一个或多个头部霍尔传感器,该一个或多个头部霍尔传感器被配置为检测接近头部部段的外部磁场。
[0030]
在另一个实施例中,外部附件是玩具勺子,用于允许用户假装给治疗机器人喂食,其中该玩具勺子包括一个或多个磁体,用于在用户假装给治疗机器人喂食时致动一个或多个头部霍尔传感器。
[0031]
根据本公开的再一个方面,提供了一种系统,用于便于针对一组用户的面向群体的训练和治疗,并且提供与该组用户的主题互动。该系统包括多个治疗机器人,每个治疗机器人用于与个人用户互动。多个治疗机器人无线连接在一起,用于通过共享个人信息和协调同步任务来执行面向群体的训练。
[0032]
优选地,该系统进一步包括计算机设备,用于创建、设计和管理同步任务,并且接收来自该多个治疗机器人的信号,以生成评估该组用户的认知领域的评估报告。
[0033]
优选地,该系统进一步包括控制单元,该控制单元无线连接到该多个治疗机器人,用于远程控制该多个治疗机器人执行同步任务。
[0034]
优选地,多个治疗机器人通过wifi、蓝牙、红外通信、蜂窝、近场通信或其他无线通信方法连接到计算机设备和控制单元。
[0035]
提供本发明内容是为了以简化的形式介绍将在以下具体实施方式中进一步描述的一些概念。本发明内容不意图识别所要求保护的主题的关键特征或必要特征,也不意图用于帮助确定所要求保护的主题的范围。如下文实施例所示,公开了本发明的其他方面和优点。
附图说明
[0036]
附图包含用于进一步说明和阐明本公开的上述和其他方面、优点和特征的图。应理解,这些附图仅描绘了本公开的某些实施例并且不意图限制其范围。还应理解,这些附图是为了简单和清楚而示出的并且不一定按比例绘制的。现在将通过使用附图以另外的特征和细节来描述和解释本公开,在附图中:
[0037]
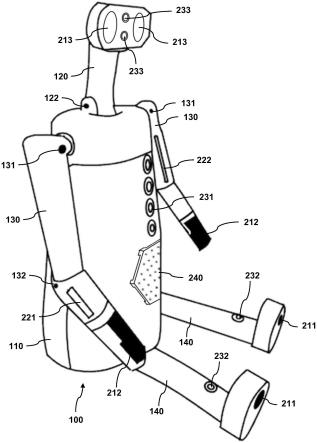
图1是根据本公开的某些实施例的治疗机器人的示意图;
[0038]
图2是图1的治疗机器人的背面的示意图;
[0039]
图3是图1的治疗机器人的臂部部段的透视图;
[0040]
图4是图1的治疗机器人的躯干的透视图;
[0041]
图5是图1的治疗机器人的头部部段的透视图;
[0042]
图6是根据本公开的某些实施例的处于男性配置的示例性治疗机器人;
[0043]
图7是根据本公开的某些实施例的处于女性配置中的示例性治疗机器人;
[0044]
图8是根据本公开的某些实施例的可以由治疗机器人使用的衣服的说明性示例;
[0045]
图9示出了说明根据本公开的某些实施例的治疗机器人的内部结构的系统框图;
[0046]
图10是示出与多个治疗机器人的网络连接的系统图;
[0047]
图11示出了说明根据本公开的某些实施例的治疗机器人的分组的图;
[0048]
图12示出了用于任务创建的用户接口;以及
[0049]
图13示出了用于列出任务中的动作和有效互动的标准的用户接口。
具体实施方式
[0050]
以下具体实施方式本质上仅是示例性的,并且不意图限制本公开或其应用和/或使用。应理解,存在大量的变化。具体实施方式将使本领域普通技术人员能够在不进行过多实验的情况下实现本公开的示例性实施例,并且应理解,在不脱离如所附权利要求中阐述的本公开的范围的情况下,可以对示例性实施例中描述的功能和结构进行各种改变或修改。
[0051]
益处、优点、问题的解决方案以及可能导致任何益处、优点或解决方案出现或变得更加显著的(一个或多个)任何元件都不应被解释为任何或所有权利要求的关键的、必需的或必要的特征或元件。本发明仅由所附权利要求(包括在本技术未决期间所做的任何修改以及所发布的那些权利要求的所有等效物)来限定。
[0052]
诸如“上”、“下”、“左”、“右”、“顶部”、“底部”及其变体的术语在本文中是为了便于描述而使用的,以解释元件的定位,或一个元件相对于另一个元件的定位,并且不意图限制特定的取向或位置。
[0053]
如本文所用,术语“老人”广义上包括超过50岁,或优选超过60岁,或最优选超过65岁的个人。优选地,本公开内容被设计用于主要为老人和患有各种神经疾病(包括但不限于多发性梗塞性认知障碍症、头部损伤、脊髓损伤、失语症、语言障碍、构音障碍、阿尔茨海默病(ad)和帕金森病)的其他患者的用户。
[0054]
术语“护理者”用于涵盖任何辅助老人的人,无论是否持有任何特定的执照。在某些实施例中,术语“护理者”还应包括语音治疗师、职业治疗师、物理治疗师、听力学家、护士、医生、老年护理专家以及老人的亲属或家庭成员。
[0055]
本公开总体涉及一种互动式治疗机器人,该互动式治疗机器人可以便于老人的各种训练和治疗。更特定地,但非限制性地,本公开涉及一种治疗机器人,其可以实现对老人(特别是对患有认知障碍症、失语和其他心智残疾的老人)的群体或个人训练和/或非药物治疗。
[0056]
随着年长者越来越接受新技术,老人用的机器人和机器人玩偶越来越被人们所接受,尤其是在护理领域。因此,在训练和非药物治疗中使用专门设计的治疗玩偶越来越受欢迎。从长远来看,治疗玩偶的使用帮助减少认知障碍症(bpsd)患者的行为和心理症状,提高他们的生活质量。此外,他们行为的积极影响也可能有助于护理者的心理健康,并且减少他们的工作量和压力。
[0057]
如图1和图2中概念性地示出的,提供了一种治疗机器人100,用于便于用户(优选为老人或患有各种神经疾病的患者)的训练和非药物治疗。治疗机器人100被开发为模仿始终需要成年人关注的两岁小孩。在训练和治疗中使用治疗机器人100的概念是帮助老人回忆起他们的记忆和护理小孩的本能。特别地,治疗机器人100提供个性化训练并且支持主流
疗法,包括但不限于依恋疗法、感觉刺激疗法和回忆疗法。因此,本发明可以有利地实现与用户的主题互动,并且主动鼓励用户在各种活动中与治疗机器人100互动。
[0058]
概括地,治疗机器人100由躯干110、头部部段120和两个或更多个肢体部段形成,该两个或更多个肢体部段优选地包括两个臂部部段130和两个腿部部段140。显然,治疗机器人100可以模仿其他宠物、动物或其他想象的角色。因此,在不脱离本公开的范围和精神的情况下,治疗机器人100可以由更多或更少的肢体部段形成,并且可以包括诸如尾部或翼部的其他部段。
[0059]
躯干110与两岁儿童的人类躯干尺寸基本上相同,并且在躯干110内部设置有空腔,用于容纳电子设备、音频系统、电池320和其他部件。在某些实施例中,躯干110包括一个或多个身体加速度计或陀螺仪(未示出),该一个或多个身体加速度计或陀螺仪被配置为确定选自由以下组成的组的至少一个物理特征:治疗机器人110的取向、移动和加速度,从而可以分析用户对治疗机器人110的精确移动。与第一加速度计221和第二加速度计222一起操作,这将在下面详细解释,身体加速度计或陀螺仪可以确定两个臂部部段130的平衡。
[0060]
两个肢体部段,诸如两个臂部部段130,可由用户相对于躯干110枢转。优选地,每个臂部部段130可以经由臂关节131枢转以在臂部部段130的至少相当于伸展的第一位置和折叠的第二位置之间移动。类似地,两个腿部部段140也可相对于躯干110枢转。优选地,每个腿部部段140可枢转以在至少第一坐姿和第二站姿之间移动。该活动可以用于训练用户的主要肌肉。如图所示,每个单独的肢体部段包括一个或多个加速度计220、陀螺仪、致动器、角度传感器等,该一个或多个加速度计、陀螺仪、致动器、角度传感器等被配置为检测单独的肢体部段相对于躯干110的移动,其中肢体部段的移动是从由取向、移动和加速度组成的组选择的。如图3所示,一个或多个加速度计220可移除地嵌入相应的肢体部段中。第一加速度计221设置在臂部部段130的上臂,而第二加速度计222设置在臂部部段130的前臂。类似的加速度计或陀螺仪(未示出)也可以设置在两个腿部部段140中,用于检测用户的相应移动。
[0061]
在再一个方面,治疗机器人100具有多个压力传感器210,该多个压力传感器被配置为检测用户的互动。多个压力传感器210可以包括:一个或多个头部压力传感器213,其被配置为检测对头部部段120的按压;以及一个或多个肢体压力传感器,其在每个单独的肢体部段上,该一个或多个肢体压力传感器被配置为检测对单独的肢体部段的按压。例如,可以有一个或多个手压力传感器212来检测治疗机器人100的手的按压,以及一个或多个脚底压力传感器211来检测治疗机器人100的脚底的按压。利用多个压力传感器210,可以检测用户与头部部段120和两个或更多个肢体部段的互动。
[0062]
在如图2所示的某些实施例中,多个压力传感器210可以进一步包括背压传感器214,该背压传感器定位在躯干110的背面上,该背压传感器被配置为检测治疗机器人100的打嗝。当治疗机器人100模仿婴儿时,用户可以使治疗机器人100打嗝,作为确定用户心智条件的训练或评估的一部分。
[0063]
本公开的另一个方面提供多个磁场传感器230,其被配置为检测来自外部附件的外部磁场。磁场传感器230可以是各种形式,包括霍尔效应传感器、磁阻传感器或其他合适的设备。磁场传感器230可以包括在感测设备的顶部上的金属板,使得外部磁体能够对其进行吸引。优选地,多个磁场传感器230包括:一个或多个肢体霍尔传感器232,其在每个个人
肢体部段上,该一个或多个肢体霍尔传感器被配置为检测个人肢体部段接近的外部磁场;一个或多个头部霍尔传感器233,其被配置为检测接近头部部段120的外部磁场;以及一个或多个躯干霍尔传感器231,其被配置为检测接近躯干110的外部磁场。如稍后参考图9所讨论的,多个磁场传感器230被配置为检测附件,诸如衣服或玩具勺子,从而用户可以模仿穿上衣服并且假装给治疗机器人100喂食的动作。如图3中示出的,两个臂部部段130还可以包括可枢转的肘部132,用于更容易地穿衣。
[0064]
如图1和图4所示,扬声器模块240设置在躯干110上。扬声器模块240具有用于在不阻挡声波的情况下保护内部电子设备的凸起盖243和用于广播声音或语音的多个开口244。扬声器模块240被配置为可听地广播预先记录的音频,提示用户在主题互动和训练期间做出响应。预先记录的音频可以理想地包括用户或护理者熟悉的人的声音。扬声器模块240向用户广播指令并且激励用户与治疗机器人100互动。
[0065]
现在参考头部部段120,如图5中所示,该头部部段包括头部关节122,用于枢转地连接到躯干110,从而头部部段120被允许小角度地上下旋转以执行点头。头部部段120还包括一个或多个头部压力传感器213,更优选地,发光元件安装在头部压力传感器213周围,以向用户提供照明效果作为实时反馈,这可以主动地和响应地促进互动。
[0066]
图6示出了男性配置的示例性治疗机器人100,并且图7示出了女性配置的示例性治疗机器人100。治疗机器人100被衣服和附件覆盖以模仿人、宠物、动物或其他想象的角色。外部附件,特别是衣服,可容易地可移除地附接到治疗机器人100,使得可以清洁其上的污垢。相比之下,常规的用户机器人玩偶在清理方面普遍存在困难。特别地,玩偶衣服具有双面设计,以便于给机器人玩偶穿衣,并且是可洗的。图8概念性地示出了用于治疗机器人100的衣服400。衣服400包括一个或多个磁体410,用于致动多个磁场传感器230以确定衣服400是否正确地穿在治疗机器人100上。一个或多个磁体410允许用户容易地穿戴到治疗机器人100上,并且允许在与精细运动技能相关的训练中检测正确的穿戴。此外,衣服400进一步可以包括导电织物420,用于致动多个磁场传感器230以检测用户触摸的衣服上的精确位置。
[0067]
作为示例,外部附件还可以包括玩具勺子,用于允许用户假装给治疗机器人100喂食。玩具勺子包括一个或多个磁体,用于在用户假装给治疗机器人喂食时致动一个或多个头部霍尔传感器233。此布置允许护理者使用治疗机器人100来执行与角色扮演相关的特定训练。
[0068]
如图9中所示,本公开进一步提供示出治疗机器人100的内部结构的系统框图的详细架构。微控制器单元310被配置为通过从扬声器模块240广播预先记录的音频来提示用户在主题互动期间做出响应,从而向用户提供指令。例如,主题互动可以包括但不限于,使治疗机器人100的背部打嗝、按摩面部、清洁面部、拥抱、通过触摸计算手指数、安抚哭闹的婴儿、梳理头发、用玩具勺子给婴儿喂食、或举起肢体以模仿治疗机器人100的锻炼。在某些实施例中,预先记录的音频由音频编解码器242解码,由音频放大器241放大。包括压力传感器210、一个或多个加速度计220或陀螺仪、磁场传感器230在内的多个传感器感测用户的运动,并且将信号传输到微控制器单元310,该微控制器单元在接收到信号时触发作为激励程序的实时反馈的执行。实时反馈包括向用户提供至少音频提示、照明效果、振动效果或其任意组合。通过实时反馈,激励程序可以便于用户遵循指令并且与治疗机器人100互动。
[0069]
治疗机器人100用电池320操作,该电池可以是可充电电池或不可充电电池。诸如微型sd卡的外部存储器340被安装到治疗机器人100,用于存储预先记录的音频、评估信息或用户的报告。
[0070]
有利地,治疗机器人100进一步包括具有扬声器模块240和音频记录器330的语音能力跟踪系统。音频记录器330可以包括放大器331。扬声器模块240被配置为可听地广播预先记录的音频,提示用户在主题互动期间做出响应。预先记录的音频包括用户熟悉的人的声音,诸如用户的家庭成员或护理者。音频记录器330被配置为响应于预先记录的音频来记录用户的音频信息。音频信息被上传到计算机设备,用于识别用户产生的独特的单词或声音,并且确定用户是否患有与失语症、语言障碍、构音障碍或其他神经疾病相关联的病症。许多患有心智障碍的老人在后期会出现失语症。躯干内部的音频记录器330被设计成记录互动期间的声音响应,用于向治疗师提供信息以评估他们的医疗条件。由语音识别软件可以分析语音的内容和说出的单词数或产生的杂音。老人使用的各种元音也可以由语音识别软件自动确定以供语音治疗师评估患者的语言能力。因此,当用户与治疗机器人100互动时,治疗机器人100可以有利地连续收集关于用户的语音能力的信息,而不会过度消耗治疗师的太多咨询时间。在某些实施例中,音频记录器330还用于在待机期间捕获用户的语音,并且将语音信号传输到微控制器单元310,用于识别唤醒词。唤醒词帮助支持老人的需求。例如,它可以作为智能家居代理来检测用户的身份,提供关于预定项目(诸如药物管理和约会)的警报或提醒。它还可以帮助安抚老人的情感,以便在引起注意时及时做出反应。
[0071]
治疗机器人100进一步包括可优选地经由wifi接入点530或其他网络网关与计算机设备550通信的网络模块350。在图10中示出了网络连接。计算机设备550可以是被配置为通过wifi、蓝牙、红外通信、蜂窝、近场通信或其他无线通信方法与治疗机器人100通信的个人计算机、云服务器、移动电话、平板电脑或其他智能设备。网络模块350可以提供室内位置信息,使得可以找到治疗机器人100。优选地,护理者可以使用计算机设备550在用户接口中的任务管理功能下为用户创建、设计和管理不同的任务。难度的级别也可以根据每个用户的能力进行调整。计算机设备550在接收到信号后,基于接收到的信号生成评估用户的认知领域的评估报告。
[0072]
治疗机器人100可以个人使用或成组使用。使用多个治疗机器人100的面向群体的训练和治疗也可以被设计并执行以实现特定的群体训练。一组用户可以以协同效应一起参与主题互动。如图10所示,多个治疗机器人100被布置成每个都与组中的个人用户互动,并且同时无线地连接在一起以形成训练系统,用于通过共享个人信息和协调同步任务来执行面向群体的训练。在某些实施例中,该系统包括控制单元500,该控制单元无线连接到多个治疗机器人100,用于远程控制多个治疗机器人100执行同步任务。图11示出了治疗机器人100的分组的示例。在该示例中,两个治疗机器人100(设备1和设备8)连接在一起以形成用于执行任务1的组a601。三个治疗机器人100(设备2、设备6和设备7)连接在一起以形成用于执行任务4的组b 602。另外两个治疗机器人100(设备4和设备9)连接在一起以形成用于执行任务5的组c 603。其他未使用的治疗机器人100在空闲模式604中被布置在分离的组中。控制单元500可以有利地连接训练中心中的所有治疗机器人100,并且护理者可以在不需要将治疗机器人100个人配对的情况下使用计算机设备550来方便地将特定数量的治疗机器人100连接在一起以形成组。这是特别重要的,因为治疗机器人100没有设置复杂的用户接
口。护理者可以仅通过按压用于选择主题互动的手压力传感器212,而不是诸如配对和同步治疗机器人100的其他复杂操作来控制治疗机器人100。
[0073]
在某些实施例中,微控制器单元310进一步被配置为可以与多个传感器通信以在基于规则的分析过程的基础上来确定有效互动。当确定互动有效时,微控制器单元310将触发对用户的实时反馈,用于鼓励用户继续与治疗机器人100互动,诸如继续移动肢体部段,继续使背部打嗝,或继续为治疗机器人100穿衣服。基于规则的分析过程通过满足预限定任务的一个或多个标准来实时确定从信号识别的事件是否与预限定任务相关联。
[0074]
如图12中所示,可以通过限定所需的目标值来创建任务,该目标值设置用于确定事件是否有效的规则。该任务可以由护理者预先限定,以迎合不同的主题和每个用户的技能能力。图13示出了任务中的动作和有效互动的标准的示例,它们共同形成了限定主题互动的一系列动作。任务成功率和任何偏差都存储在数据库中以供评估。
[0075]
治疗机器人100还可以与不同的物联网(iot)设备连接,并且与来自各种家庭物联网设备的不同应用编程接口(api)集成,这可以增强家庭支持特征。
[0076]
这说明了根据本公开的互动式治疗机器人,用于便于对老人和患有各种神经疾病的其他患者的训练和非药物治疗。将显而易见的是,上述公开的变体和其他特征和功能,或其替代方案,可以被组合到许多其他设备中。因此,本实施例在所有方面都被认为是说明性的而非限制性的。本公开的范围由所附权利要求而不是由前面的描述来指示,并且,因此在权利要求的等效物的含义和范围内的所有变化都包含在其中。
[0077]
参考文献列表
[0078]
以下是说明书中偶尔引用的参考文献列表。这些参考文献的公开内容中的每一个都通过引用以其整体并入本文。
[0079]
[1]nd.“老龄化与健康的10个事实(10facts on ageing and health)”,世界卫生组织(world health organization),2017年5月23日[互联网],可从以下网址获取:https://www.who.int/features/factfiles/ageing/en/[2019年11月15日访问]。
[0080]
[2]m.prince等人的“2015年世界阿尔茨海默病报告:认知障碍症的全球影响(world alzheimer report 2015 the global impact of dementia)”alz[互联网],可从以下网址获取:https://www.alz.co.uk/research/worldalzheimerreport2015.pdf[2019年11月15日访问]。
[0081]
[3]j.elflein的“2018-2030年全球认知障碍症护理支出预测(dementia care expenditure forecast worldwide 2018-2030)”,德慧(statista)[互联网],可从以下网址获取:https://www.statista.com/statistics/471323/global-dementia-economic-impac t-forecast/[2019年11月15日访问]。
[0082]
[4]v.j.hall的“15年内没有治疗阿尔茨海默病的新药(no new drugs for alzheimer's disease in 15years)”,科学北欧(sciencenordic)2018年3月17日[互联网],可从以下网址获取:https://sciencenordic.com/alzheimers-disease-denmark-forskerzonen/no-new-drugs-for-alzheimers-disease-in-15-years/1454636[2019年11月15日访问]。
[0083]
[5]nd.“阿尔茨海默病的非药物干预(non-drug interventions for alzheimer’s disease)”,ncbi.nlm.nih.gov.2017年6月29日[互联网],可从以下网址获取:https://
www.ncbi.nlm.nih.gov/books/nbk279355/[2019年11月20日访问]。
[0084]
[6]j.d.huntley等人的“认知干预是否能改善认知障碍症患者的一般认知?荟萃分析和荟萃回归(do cognitive interventions improve general cognition in dementia?a meta-analysis and meta-regression)”,《英国医学杂志(bmj open)》2015;5(4):e005247。
[0085]
[7]p.leung等人的“认知障碍症和轻度认知障碍患者的社会支持团体干预:文献的系统综述(social support group interventions in people with dementia and mild cognitive impairment:a systematic review of the literature)”,《国际老年精神病学杂志(intj geriatr psychiatry)》2015;30(1):1-9。
[0086]
[8]h.c.huang等人的“回忆疗法改善老年认知障碍症患者认知功能和减少抑郁症状:随机对照试验的荟萃分析(reminiscence therapy improves cognitive functions and reduces depressive symptoms in elderly people with dementia:a meta-analysis of randomized controlled trials)”,《美国医学杂志(j am med dir assoc)》2015;16(12):1087-1094。
[0087]
[9]e.ernst等人的“反射学:随机临床试验系统综述的更新(reflexology:an update of a systematic review of randomised clinical trials)”,《欧洲更年期杂志(maturitas)》2011;68(2):116-120
[0088]
[10]m.burckhardt等人的“omega-3脂肪酸用于治疗认知障碍症(omega-3 fatty acids for the treatment of dementia)”,《科克伦系统综述数据库(cochrane database syst rev)》2016(4):cd009002。
[0089]
[11]l.t.forrester等人的“认知障碍症的芳香疗法(aromatherapy for dementia)”,《科克伦系统综述数据库(cochrane database syst rev)》2014;(2):cd003150。
[0090]
[12]l.f.menna等人的“通过动物辅助活动评估老人的社会关系(evaluation of social relationships in elderly by animal-assisted activity)”,《国际精神病学杂志(int psychogeriatr)》.2012年6月;24(6):1019-20.doi:10.1017/s1041610211002742。
[0091]
[13]v.bernabei等人,“对受认知障碍症或精神障碍影响的老年患者的动物辅助干预:综述(animal-assisted interventions for elderly patients affected by dementia or psychiatric disorders:a review)”,《精神病学研究杂志(journal of psychiatric research)》2013;47(6):762
–
773.doi:10.1016/j.jpsychires.2012.12.014。
[0092]
[14]w.d.stiehl等人的“用于关系、情感触摸的治疗机器人伴侣的设计(design of a therapeutic robotic companion for relational,affective touch)”,第14届ieee机器人与人类互动交流研讨会会议录(ro-man'05);2005年8月;第408-415页。
[0093]
[15]m.birks等人的“老年护理机构中作为治疗工具的机器人海豹:定性研究(robotic seals as therapeutic tools in an aged care facility:a qualitative study)”,《老龄研究(j aging res)》.2016;2016:8569602.doi:10.1155/2016/8569602
[0094]
[16]b.klein等人的“情感机器人(emotional robots)”,geropsych(bern).2013;26:89
–
99.https://doi.org/10.1024/1662-9647/a000085。
[0095]
[17]r.pezzati等人的“玩偶疗法能保持或促进有认知、行为和情感问题的人的依恋吗?对被收容治疗的认知障碍症患者的初步研究(can doll therapy preserve or promote attachment in people with cognitive,behavioral,and emotional problems?a pilot study in institutionalized patients with dementia)”《心理学前沿(front psychol)》.2014;5:342.doi:10.3389/fpsyg.2014.00342。
[0096]
[18]a sauer的“玩偶疗法治疗阿尔茨海默病的利弊(pros and cons of doll therapy for alzheimer’s)”,阿尔茨海默病网(alzheimers.net),2017年3月22日.[互联网]可从以下网址获取:https://www.alzheimers.net/8-6-14-doll-therapy-alzheimers/[2019年11月18日访问]。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
