1.本发明涉及机器人技术领域,具体地,涉及一种负压驱动机器人。
背景技术:
2.管道机器人技术是集自动控制技术、机械制造技术、新材料、人工智能测试技术和计算机技术于一体的综合性科学技术。目前管道已广泛应用于石油、化工、天然气及核工业等领域,经过发展也逐步延伸到医学领域。
3.现有管道机器人主要采用轮式结构,这种结构不仅导致机器人的体积大,且不能较好地适应管道中复杂多变的情况,运动灵活性较差。对于轮式管道机器人一般需要用电机驱动,需要实时供电,因此需要安装电池且往往具有一定的噪音,已逐步不能适应日益苛刻的软体机器人作业的需求。
4.专利文献cn103742755a公开了一种软体履带式管道机器人,它包括一个充气膨胀本体(1)和运动执行装置,运动执行装置包括驱动电机(4)和履带(5),履带(5)呈螺旋形闭合设置于充气膨胀本体(1)表面,履带(5)的下部间隔设置有多个驱动履带运动的驱动轮(6),每个驱动轮(6)均连接有一个驱动其旋转、固设于充气膨胀本体(1)上的驱动电机(4),但该设计仍然需要实时加电且具有一定的噪音,有待于进一步改进。
技术实现要素:
5.针对现有技术中的缺陷,本发明的目的是提供一种负压驱动机器人。
6.根据本发明提供的一种负压驱动机器人,包括:
7.负压驱动系统,采用负压能为流体流动提供动力;
8.前足部,具有第一腔室并位于机器人的前端,所述第一腔室通过第一柔性管连接所述负压驱动系统;
9.中间段,具有第二腔室并位于机器人的中部,所述第二腔室通过第二柔性管连接所述负压驱动系统,其中,所述第一柔性管沿所述第二腔室的长度方向贯穿且所述第二腔室沿贯穿的方向最长时的长度小于或等于位于所述第二腔室内第一柔性管的长度;
10.后足部,具有第三腔室并位于机器人的后端,所述第三腔室通过第三柔性管连接所述负压驱动系统,其中,所述第一柔性管、第二柔性管均贯穿所述第三腔室且所述第三腔室沿贯穿方向最长时的长度小于或等于位于所述第二腔室内第一柔性管、第二柔性管的长度;
11.其中,前足部、后足部能够通过充入流体或抽出流体实现在管结构内或壁面的定位,所述中间段通过充入流体或抽出流体实现长度的伸长或缩短,在机器人运动时先将后足部定位后驱使所述中间段伸长进而推动所述前足部前进,再将后足部解除定位、前足部定位后驱使所述中间段缩短进而带动所述后足部前进实现机器人的前进运动。
12.优选地,所述前足部、后足部均通过膨胀的方式抵接定位在管结构内。
13.优选地,所述前足部通过沿轴向方向膨胀定位在管结构内或通过收缩吸附在管结
构或壁面上;
14.所述后足部通过沿轴向方向膨胀定位在管结构内或通过收缩吸附在管结构或壁面上。
15.优选地,所述中间段具有拐弯功能。
16.优选地,所述中间段被配置为一个柔性体以及沿柔性体的长度方向并列布置在所述柔性体内的至少三个管体并分别连接有流体管道。
17.优选地,所述中间段采用波纹管。
18.优选地,所述前足部和/或后足部的一端或两端具有吸附部,所述吸附部包括柔性层,所述柔性层在当前足部和/或后足部内部流体抽出时呈内凹状,当向前足部和/或后足部内部充入流体时所述柔性层能够呈鼓出状或呈平面状。
19.优选地,所述负压驱动系统包括:
20.自适应抽吸单元,具有负压驱动机构以及布置在所述负压驱动机构内部的储液空间,所述储液空间分别通过第一流道、第二流道连接腔体结构;
21.通断单元,配置在第一流道以及第二流道上并能够使得第一流道和第二流道处于打开状态或者切断状态,其中,在第一流道处于打开状态、第二流道处于切断状态时,在所述负压驱动机构的驱使下所述储液空间中的流体通过第一流道进入到所述腔体结构进而使所述腔体结构表现为伸长;在第一流道处于切断状态、第二流道处于打开状态时,在所述负压驱动机构的驱使下所述腔体结构中的流体通过第二流道进入到所述储液空间中进而使所述腔体结构表现为缩短,所述腔体结构为前足部、中间段或后足部;
22.控制单元,能够控制所述通断单元运动第一位移进而调整第一流道或第二流道的孔隙,通过所述第一位移以及预设的流道参数、腔体结构参数获得所述腔体结构伸长或缩短的第二位移,其中,所述控制单元通过第二位移与位移指令比对后修正所述第一位移直至输出的所述第二位移等于位移指令或者处于所述位移指令的范围内。
23.优选地,所述负压驱动机构包括第一负压驱动器以及第二负压驱动器;
24.所述第一负压驱动器包括第一壳体、第一转轴以及第一转动体,所述第一转动体通过第一转轴可转动的安装在第一壳体的内部并在第一转动体的两侧形成第一负压空间以及第一流体空间;
25.所述第二负压驱动器包括第二壳体、第二转轴以及第二转动体,所述第二转动体通过第二转轴可转动的安装在第二壳体的内部并在第二转动体的两侧形成第二负压空间以及第二流体空间;
26.在第一流道处于打开状态、第二流道处于切断状态时,外界大气压的作用下第一转动体朝向第一负压空间变小的方向转动进而使得第一流体空间变小,流体通过第一流道进入到所述腔体结构内;在第一流道处于切断状态、第二流道处于打开状态时,外界大气压的作用下驱使腔体结构中的流体通过第二流道流入第二流体空间中进而驱使第二负压空间变小;
27.所述第一流体空间和第二流体空间共同组成储液空间,所述第一流体空间和第二流体空间通过安装有单向阀的第三流道相连;
28.当第一流道和第二流道均关闭时,外力驱使所述第一转动体绕第一转轴转动使得第一流体空间体积变大时,第二流体空间中流体通过所述第三流道经单向阀被抽入到所述
第一流体空间中使得所述第二负压空间体积变大。
29.优选地,所述通断单元包括分别安装在第一流道、第二流道上的两个通断执行器;所述通断执行器包括第三壳体以及布置在所述第三壳体内部并将所述第三壳体内部分割为第一腔体、第二腔体的隔离膜片;
30.所述第二腔体的外部包裹有柔性阀膜,柔性阀膜的底端为可形变端,所述第一腔体的内部设置有上下运动机构,所述上下运动机构的顶端固定安装在第三壳体上,上下运动机构的底端通过所述隔离膜片连接柔性阀膜的顶端;
31.所述上下运动机构包括依次相连的压电材料和磁致伸缩材料,当上下运动机构通电后磁致伸缩材料自身形变伸长使得所述隔离膜片朝向所述柔性阀膜的顶端运动挤压柔性阀膜进而使得可形变端向外凸出从而能够使所述第一流道或第二流道变小或切断并通过所述压电材料自身电信号的变化获得所述可形变端的位移。
32.与现有技术相比,本发明具有如下的有益效果:
33.1、本发明提供了一种管道和壁面均可爬行的机器人,负压驱动,通断精密调控,运动精度高,柔性自适应变形且变形饱和后充压刚度可保持进而实现机器人各部位相互推动或拉动的动作,不用实时供电,运动平稳,无噪声。
34.2、本发明中通过三个柔性腔体以及柔性管路的组合即可实现机器人行走,结构简单,容易实现,即可应用于宏观大的管路,又可应用于如血管类的微小管道,应用范围广泛。
35.3、本发明通过稳定的负压驱动结合上下驱动机构实现驱动控制过程中无通常步进方式运动的单步误差累积,可实现连续超精密驱动控制,整体驱动系统紧凑,体积小,无噪音。
36.4、本发明驱动系统具有自传感功能,驱动传感一体,相比现有技术结构更简单。
37.5、本发明基于负压储能,在初始状态调整完毕及能量注入后,驱动过程中不用实时加电,依靠外界大气即可实现真空驱动,无噪声。
38.6.本发明容易实现输出运动精确控制,大气压恒定,因此横截面积确定的情况下具有驱动力恒定的优势,其他的能量如电能等都不恒定,驱动的精度更高。
39.7、本发明中的上下驱动机构可采用电磁驱动与压电材料、磁致伸缩材料配合的结构、音圈电机、形状记忆合金、凸轮等驱动的结构,能够根据实际的应用场景和产品实际驱动的精度进行合理选择,应用范围更广。
附图说明
40.通过阅读参照以下附图对非限制性实施例所作的详细描述,本发明的其它特征、目的和优点将会变得更明显:
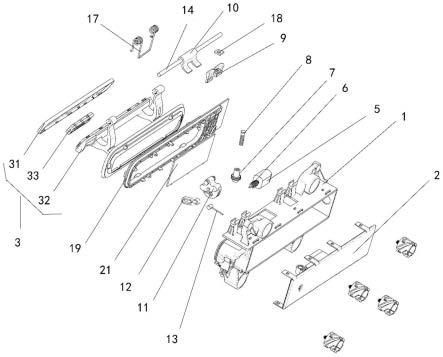
41.图1为本发明的部分结构示意图,其中,机器人的前足部、中间段、后足部依次位于管结构内部;
42.图2为前足部和/或后足部采用三个管体并列布置时的结构示意图;
43.图3为图2横截面的结构示意图;
44.图4为三个管体均同时充入相同体积流体时中间段伸长δs时的结构示意图;
45.图5为中间段中一个管体充入流体,其他两个管体不充入流体时中间段弯曲δθ角度时的结构示意图;
46.图6为中间段采用波纹管时的结构示意图;
47.图7为前足部和/或后足部的两端均采用吸附部时的结构示意图,其中,左侧图吸附部的柔性层呈内凹状,右侧图吸附部的柔性层呈外凸状;
48.图8为负压驱动系统的结构示意图;
49.图9为阀口全部打开时的结构示意图,其中图中箭头下方为方框部位的放大图;
50.图10为阀口部分打开时的结构示意图,其中图中箭头下方为方框部位的放大图;
51.图11为的阀口关闭时的结构示意图,其中图中箭头下方为方框部位的放大图;
52.图12为负压驱动系统一个周期内工作原理示意图;
53.图13为机器人在管结构内行走距离d距离的原理示意图。
54.图中示出:
55.管结构 001
56.前足部 010
57.第一腔室 011
58.第一柔性管 012
59.中间段 020
60.第二腔室 021
61.第二柔性管 022
62.柔性体 023
63.管体 024
64.流体管道 025
65.波纹管 026
66.后足部 030
67.第三腔室 031
68.第三柔性管 032
69.柔性层 033
70.自适应抽吸单元 1
71.第一壳体 11
72.第一负压空间 111
73.第一流体空间 112
74.阀口 1121
75.第一转轴 12
76.第一转动体 13
77.第二壳体 14
78.第二负压空间 141
79.第二流体空间 142
80.第二转轴 15
81.第二转动体 16
82.驱动把手 17
83.限位块 18
84.腔体结构 2
85.通断单元 3
86.第一流道 101
87.第二流道 102
88.第三流道 103
89.单向阀 1031
90.第三壳体 31
91.第一腔体 311
92.第二腔体 312
93.流体通道 313
94.隔离膜片 32
95.垫片 321
96.柔性阀膜 33
97.可形变端 331
98.磁致伸缩材料 332
99.压电材料 333
100.激励线圈 34
101.磁轭 35
102.预压螺钉 36
具体实施方式
103.下面结合具体实施例对本发明进行详细说明。以下实施例将有助于本领域的技术人员进一步理解本发明,但不以任何形式限制本发明。应当指出的是,对本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变化和改进。这些都属于本发明的保护范围。
104.实施例1:
105.本发明提供了一种负压驱动机器人,如图1所示,包括负压驱动系统、前足部010、中间段020以及后足部030,负压驱动系统采用负压能为流体流动提供动力;前足部010具有第一腔室011并位于机器人的前端,第一腔室011通过第一柔性管012连接负压驱动系统;中间段020具有第二腔室021并位于机器人的中部,第二腔室021通过第二柔性管022连接负压驱动系统,其中,第一柔性管012沿第二腔室021的长度方向贯穿且第二腔室021沿贯穿的方向最长时的长度小于或等于位于第二腔室021内第一柔性管012的长度;后足部030具有第三腔室031并位于机器人的后端,第三腔室031通过第三柔性管032连接负压驱动系统,其中,第一柔性管012、第二柔性管022均贯穿第三腔室031且第三腔室031沿贯穿方向最长时的长度小于或等于位于第二腔室021内第一柔性管012、第二柔性管022的长度。
106.如图1所示,前足部010、后足部030能够通过充入流体实现在管结构001内定位,当前足部010、后足部030充入流体时发生膨胀伸长而在管结构001内张紧而能够被挤紧定位,当前足部010、后足部030抽出流体时发生缩小变短从而使自身外径小于管结构001的内径而可以自由移动。在机器人运动时,先通过充入流体将后足部030定位后通过充入流体驱使
中间段020伸长进而能够推动前足部010前进,再通过充入流体将前足部010定位并通过抽出流体解除后足部030定位,此时通过抽出流体驱使中间段020缩短进而能够拉动后足部030前进实现机器人的前进运动。
107.本发明中的流体既可以采用气体,也可以采用液体,机器人运动的各个部位可采用非金属材料,机器人可应用于多种场景,例如人体的血管,机器的油管,各个行业的流体输送管路等,应用范围广泛。
108.具体地,前足部010、后足部030均通过膨胀的方式定位在管结构001内,前足部010优选通过沿轴向方向膨胀定位在管结构001内,后足部030优选通过沿轴向方向膨胀定位在管结构001内,前足部010、后足部030的周向包裹有外套,外套不可伸缩,外套内部具有弹性腔体,弹性腔体可伸缩使得前足部010、后足部030的径向方向的膨胀被限制,轴向方向可伸缩,当前足部010、后足部030内充入流体时前足部010、后足部030沿轴向方向伸长而抵住管结构001的内壁上而被定位。
109.在实际应用中,前足部010、后足部030也可选择周向不包裹外套的结构,在充入或抽出流体时整体膨胀或缩小,具体根据实际的使用场景灵活选择。
110.中间段020的结构可选择与前足部010、后足部030相同的结构,但中间段020伸长或缩短的方向为机器人前进或后退的方向,本实施例中的中间段020可采用弹性腔体,也可采用周向包裹有外套的结构。
111.本实施例中,如图8所示,负压驱动系统包括自适应抽吸单元1、通断单元3以及控制单元,自适应抽吸单元1具有负压驱动机构以及布置在负压驱动机构内部的储液空间,储液空间分别通过第一流道101、第二流道102连接腔体结构2;通断单元3配置在第一流道101以及第二流道102上并能够使得第一流道101和第二流道102处于打开状态或者切断状态,其中,在第一流道101处于打开状态、第二流道102处于切断状态时,在负压驱动机构的驱使下储液空间中的流体通过第一流道101能够进入到腔体结构2中进而使腔体结构2表现为伸长;在第一流道101处于切断状态、第二流道102处于打开状态时,在负压驱动机构的驱使下腔体结构2中的流体能够通过第二流道102进入到储液空间中进而使腔体结构2表现为缩短。
112.进一步地,控制单元能够控制通断单元3运动第一位移进而调整第一流道101或第二流道102的孔隙,控制单元通过第一位移以及预设的流道参数、腔体结构2参数获得腔体结构2伸长或缩短的第二位移,其中,控制单元通过第二位移与位移指令比对后修正第一位移直至输出的第二位移等于位移指令或者处于位移指令的范围内,实现运动腔体结构2伸长或缩短的精确性,流道参数包括第一流道101或第二流道102的内径、流体流速等参数,腔体结构2参数包括横截面积、几何形状等参数。
113.需要说明的是,本发明中的腔体结构2可以是前足部010,也可以是后足部030,还可以是中间段020,因此本发明中的机器人三个部位均可以通过负压驱动系统进行形变,以实现机器人前进或回退的运动。
114.具体地,负压驱动机构包括第一负压驱动器以及第二负压驱动器,第一负压驱动器包括第一壳体11、第一转轴12以及第一转动体13,第一转动体13通过第一转轴12可转动的安装在第一壳体11的内部并在第一转动体13的两侧形成第一负压空间111以及第一流体空间112。第二负压驱动器包括第二壳体14、第二转轴15以及第二转动体16,第二转动体16
通过第二转轴15可转动的安装在第二壳体14的内部并在第二转动体16的两侧形成第二负压空间141以及第二流体空间142。
115.进一步地,第一转动体13的外壁与大气连通且优选为双叶片结构,在第一流道101处于打开状态、第二流道102处于切断状态时,外界大气压的作用下第一转动体13朝向第一负压空间111变小的方向转动进而使得第一流体空间112变小,流体通过第一流道101能够进入到腔体结构2使得腔体结构2伸长;第二转动体16的外壁与第二流体空间142接触且优选为单叶片结构,在第一流道101处于切断状态、第二流道102处于打开状态时,外界大气压的作用下驱使腔体结构2中的流体能够通过第二流道102流入第二流体空间142中进而驱使第二负压空间141变小。
116.第一流体空间112和第二流体空间142共同组成储液空间,第一流体空间112和第二流体空间142通过安装有单向阀1031的第三流道103相连,单向阀1031仅允许第二流体空间142中的流体向第一流体空间112内流动,不允许反向流动。当第一流道101和第二流道102均关闭时,外力驱使第一转动体13绕第一转轴12转动使得第一流体空间112体积变大时,第二流体空间142中流体通过第三流道103经单向阀1031被抽入到第一流体空间112中使得第二负压空间141体积变大,该过程为整个负压驱动系统注入能量的过程,注入能量后的系统依靠第一负压空间111、第二负压空间141的负压空间,在外界大气压的作用下可实现执行端21无需实施加电即可实现运动。
117.第一负压空间111、第一流体空间112、第二负压空间141、第二流体空间142均优选为扇形空间,可获得更加集成的外形,有利于产品的小型化设计。在实际应用中也可以是其他几何形状的空间,具体根据实际的应用场景可灵活设计。
118.通断单元3包括分别安装在第一流道101、第二流道102上的两个通断执行器;通断执行器包括第三壳体31以及布置在第三壳体31内部并将第三壳体31内部分割为第一腔体311、第二腔体312的隔离膜片32,第二腔体312的外部包裹有柔性阀膜33,柔性阀膜33的底端优选为锥状的可形变端331,第一腔体311的内部设置有上下运动机构,上下运动机构的顶端固定安装在第三壳体31上,上下运动机构的底端通过隔离膜片32连接柔性阀膜33的顶端,通过上下运动机构驱使隔离膜片32朝向或远离柔性阀膜33运动实现可形变端331形变能够实现第一流道101、第二流道102上完全打开、部分打开或完全切断的动作。
119.需要说明的是,隔离膜片32连接上下运动机构的部位设置有垫片321,可有效保护隔离膜片32不受损伤,同时,隔离膜片32的上下两侧均加上垫片321,能够使得上下运动机构运动时通过垫片321与隔离膜片32接触,即使是上下运动机构的横截面积小也能够保证垫片321与隔离膜片32的接触面积,起到了扩大接触面积的功能,其中,隔离膜片32相比垫片321更加柔软,使得驱动放大的效果更加明显。
120.本实施例中,上下运动机构包括依次相连的压电材料333和磁致伸缩材料332,当上下运动机构通电后磁致伸缩材料332自身形变伸长使得隔离膜片32朝向柔性阀膜33的顶端运动挤压柔性阀膜33进而使得可形变端331向外凸出从而能够切断第一流道101或第二流道102并能够通过压电材料333自身电信号的变化获得可形变端331的位移,即第一位移,对于成形的产品第一位移与第二位移有一定的对应关系,通过计算或试验数据的提取可最终获得压电材料333自身电信号的变化与第二位移的对应关系,进而也能够确定第二位移的数值。
121.在实际应用中,上下运动机构可以选择多种结构,如采用电机,例如音圈电机、直线电机、旋转马达等,还可以采用如气泵、液压泵、电磁作动器等,还可以是磁致伸缩材料和压电材料的复合体结构,再如采用热膨胀材料,如形状记忆合金、相变材料等,形状记忆合金通过加热实现形变并通过其自身刚度的变化也可以确定第二位移,在要求精度不是很高的驱动中,上下运动机构还可以选择凸轮结构,通过凸轮的转动实现隔离膜片32运动的调整。
122.具体地,隔离膜片32采用金属或非金属片状结构,上下运动机构形变或运动时能够通过隔离膜片32驱使柔性阀膜33形变达到驱动的目的,柔性阀膜33采用弹性材料制作的膜结构,该膜结构为封闭式囊形结构,材质采用如橡胶、硅胶、弹性金属等,优选采用包括pdms膜以及配置在pdms膜两侧的pmma材料层制作,pdms膜是由pdms硅橡胶交联固化制成的一种全透明、高精度的薄膜材料,厚度从15~500μm,具有优异的拉伸回弹性,pdms膜的两侧分别设置有pmma材料层,pmma材料层优选粘接在pdms膜的两侧经压合而成,制作简单。
123.靠近隔离膜片32一侧的第二腔体312的面积大于可形变端331的面积使得隔离膜片32的运动位移小于可形变端331的运动位移,使得上下运动机构的位移被放大并表现在可形变端331上。
124.需要说明的是,靠近隔离膜片32一侧的第二腔体312的面积大于可形变端331的面积使得隔离膜片32的运动位移小于可形变端331的运动位移,由此可见,第二腔体312为液压放大腔室,隔离膜片32微小位移能够驱使可形变端331产生更大的位移。通断执行器工作时,pdms膜产生位移,液压放大腔室内流体压力产生变化,pdms膜在液体微流道方向产生不同程度的抛物线形状变形,驱动压力对应阀口1121的开度,阀口1121完全打开、部分打开或关闭,如图9所示,为阀口1121完全打开时的状态,如图10所示,为阀口1121部分打开时的状态,如图11所示,为阀口1121关闭时的状态,即对应第一流道101和/或第二流道102处于切断状态,当第二腔体312内压力增加时,柔性阀膜33变形增大,阀口1121开度变小;当第二腔体312内压力降低时,柔性阀膜33变形减小,阀口1121口开度增大。
125.进一步地,上下运动机构通过隔离膜片32与柔性阀膜33接触,流量控制过程中柔性阀膜33产生微位移挤压第二腔体312内的流体,使流体压力产生变化,导致柔性阀膜33变形从而控制流体通道313内流体的流动。
126.如图8所示,本发明中的第三壳体31内部具有控制流体流动的流体通道313,第一流道101和第二流道102均连接流体通道313并通过可形变端331控制流体通道313通断实现对第一流道101和第二流道102通断的控制。
127.通断执行器还包括激励线圈34、磁轭35以及预压螺钉36,激励线圈34沿磁致伸缩材料332的周向布置,磁轭35布置在激励线圈34的外部,预压螺钉36安装在第三壳体31上并能够调节上下运动机构上下方向所在的位置,通断执行器上还可设置永磁体,为上下运动机构提供偏置磁场,保证初始状态时流体通道313处于关闭状态。
128.需要说明的是,本发明在某些应用场景中,可以将通断单元3的结构简化更换为一般的夹子,第一流道101和第二流道102均采用柔性管,通过结构简单的夹子也能够实现第一流道101和第二流道102的打开与切断的功能,能够大大简化系统,使用也方便。
129.本发明采用准静态零里梯度的驱动方法实现驱动,驱动能量离线注入,使含有扰动的能量注入过程与驱动控制过程相互独立,驱动能量的注入有两种方式,一种可通过外
力直接驱动第一转动体13转动使得第一负压空间111变大进而内部形成负压空间,另一种可先将第一负压空间111与外部大气连通后将第一转动体13转动的设定位置后对第一负压空间111与外部隔断后内部抽真空的方式实现驱动能量的离线注入。待驱动能量注入完毕后可开始闭环驱动,由于负压能量驱动能量释放稳定,因此驱动控制过程中伴随稳态能量的输出,驱动过程中驱动力为一静态力,无波动,且驱动过程中不需要实时供电,驱动过程中驱动力不随空间位置等参数的变化而变化,大大提高了稳定性。
130.实施例2:
131.本实施例为实施例1的优选例。
132.本实施例中,前足部010、后足部030均能够通过抽出流体实现在壁面的定位,具体地,前足部010抽出流体时收缩能够吸附在壁面上,同理,后足部030抽出流体时收缩也能够吸附在壁面上。
133.如图7所示,前足部010和/或后足部030的一端或两端具有吸附部,吸附部包括柔性层033,柔性层033在当前足部010和/或后足部030内部流体抽出时呈内凹状,当向前足部010和/或后足部030内部充入流体时柔性层033能够呈鼓出状或呈平面状。
134.现以后足部030为例,说明吸附部的工作原理,在正常状态下柔性层033处于鼓出状或呈平面状,后足部030的吸附部与管结构001的内壁接触或与某处的壁面接触,在中间段020缩短形变的拉动力驱使下可沿管结构001的内壁或某处的壁面滑动,当后足部030中的流体抽出时柔性层033的周边与管结构001的内壁或某处的壁面密封接触、中间部位内凹而使得柔性层033与管结构001的内壁或某处的壁面之间形成负压空间而使得后足部030负压吸附被定位;当需要解除后足部030的定位时,向后足部030中充入流体,此时柔性层033由向后足部030中心内凹的形状逐渐变化为平面或者呈朝向后足部030外部略微外凸的结构使得柔性层033与管结构001的内壁或某处的壁面之间的负压空间消失,此时,后足部030在中间段020的拉动力驱使下可滑动。
135.需要说明的是,本实施例中的壁面可以为平面,也可以为曲面,通过本发明的精密控制均能够实现本发明中的效果。
136.本实施例中,如图2、图3所示,中间段020具有拐弯功能,中间段020被配置为一个柔性体023以及沿柔性体023的长度方向并列布置在柔性体023内的至少三个管体024并分别连接有流体管道025,流体管道025为管体024提供流体的运输通道,以管体024数量为3个为例,中间段020实现拐弯动作的原理如下:
137.当三个管体024均同时充入或抽出相同的流体时,中间段020沿直线方向伸长或缩短,如图4所示,为三个管体024均同时充入相同流体时中间段020伸长δs时的示意图。
138.当三个管体024中的一个与其他两个充入或抽出的流体体积不同时,中间段020呈现拐弯的动作,具体地,充入较多流体的管体024所对应的柔性体023伸长的长度大于充入较少流体的管体024所对应的柔性体023伸长的长度,使得整个中间段020能够根据前进的路径方向调整拐弯的幅度,其中,通过调整三个管体024中流体充入或抽出的量实现中间段020拐弯的方向和幅度。如图5所示,为中间段020中其中一个管体024充入流体,其他两个管体024不充入流体使得中间段020弯曲δθ角度时的示意图,为了使弯曲角度变大,可采取一部分管体024充入流体、另一部分管体024抽出流体同时进行的方式实现。
139.实施例3:
140.本实施例为实施例1的变化例。
141.本实施例中,如图6所示,中间段020采用波纹管026,通过充入流体和抽出流体实现中间段020的伸长与缩短,结构简单,操作方便。
142.如图8、图12所示,负压驱动系统一个周期内工作原理如下:
143.初始状态:图12中(1)所示,将流体预先注入单叶片缸体内的第二流体空间142,控制第一流道101、第二流道102均处于关闭状态,切断自适应抽吸单元1与腔体结构2之间的通路,腔体结构2为初始状态。
144.能量注入:图12中(2)所示,能量注入过程为一次性离线完成过程,推动与双叶片缸体的第一转轴12固连的驱动把手17,单叶片缸体内的流体通过第三流道103经单向阀1031流入双叶片缸体内的第一流体空间112,与此同时两个缸体内分别形成储存稳态能量的负压腔室,分别为第一负压空间111、第二负压空间141。
145.膨胀驱动执行:图12中(3)所示,控制上下运动机构的驱动电流,使第一流道101打开、第二流道102关闭,双叶片缸体内的第一流体空间112中的流体在第一负压空间111的作用下推入腔体结构2中,腔体结构2膨胀变大并伸长δs。
146.缩小驱动执行:图12中(4)所示,通过控制上下运动机构的驱动电流,关闭第一流道101,打开第二流道102,腔体结构2内的流体在第二负压空间141的作用下被吸回单叶片缸体内的第二流体空间142中,腔体结构2缩小。
147.膨胀驱动执行和缩小驱动执行,使单叶片缸体与双叶片缸体内的负压腔体完全消失,驱动能量消耗殆尽,关闭所有流道,图12中(5)所示,完成一整个周期作动。
148.本发明中机器人在管结构001中运动的原理如下:
149.如图13所示,前足部010、后足部030均通过充入流体实现在管结构001内定位,机器人运动距离d通过以下七步完成:
150.s1:将机器人的前足部010、中间段020、后足部030送入管结构001的内部;
151.s2:通过第三柔性管032向第三腔室031内充入流体使得后足部030膨胀后定位在管结构001的内部;
152.s3:通过第二柔性管022向第二腔室021内充入流体使得中间段020伸长d进而推动前足部010向前运动距离d;
153.s4:通过第一柔性管012向第一腔室011内充入流体使得前足部010膨胀后定位在管结构001的内部;
154.s5:通过第三柔性管032从第三腔室031内抽出流体使得后足部030缩小解除在管结构001内部的定位;
155.s6:通过第二柔性管022从第二腔室021抽出流体使得中间段020缩短长度d进而拉动后足部030向前运动距离d
156.s7:通过第一柔性管012从第一腔室011内抽出流体使得前足部010缩短进而接触前足部010在管结构001内部的定位,完整一个距离的前进。
157.在本技术的描述中,需要理解的是,术语“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本技术和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本技术的限制。
158.以上对本发明的具体实施例进行了描述。需要理解的是,本发明并不局限于上述特定实施方式,本领域技术人员可以在权利要求的范围内做出各种变化或修改,这并不影响本发明的实质内容。在不冲突的情况下,本技术的实施例和实施例中的特征可以任意相互组合。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。