用于平衡离心机转子的系统和方法
1.相关申请的交叉引用
2.本技术要求于2020年2月4日提交的共同未决美国临时申请序列号62/969,932和于2020年11月10日提交的共同未决美国临时申请序列号63/112,018的申请权益,所述美国临时申请的公开内容通过引用在此以其整体并入。
技术领域
3.本发明总体上涉及离心机转子,并且更具体地涉及平衡用于与离心机一起使用的转子。
背景技术:
4.通常在实验室离心机中使用转子以在离心期间固持样品。虽然转子在构造和大小上可以显著变化,但是一种常见的转子结构是具有实心转子主体的固定角转子,所述实心转子主体具有在转子主体内径向分布并且关于旋转轴线对称布置的多个腔体。在此类型的转子中,将样品放置在腔体中,从而使多个样品经受离心。
5.常规固定角转子可以由金属或各种其它材料制成。然而,也可以使用压缩模制和细丝缠绕工艺来构造转子,其中由如复合碳纤维等合适的材料制造转子。例如,可以由树脂涂覆的碳纤维层压材料层对固定角转子进行压缩模制。复合转子的实例在美国专利第8,147,392号、第8,273,202号、第8,323,169号和第10,086,387号中描述。
6.离心机的特征可以在于赋予安装在离心机内的主轴上的转子旋转扭矩的刚性转子轴或主轴。然而,对于高速离心机,如可以以50,000转每分钟(rpm)或更高的旋转速度旋转转子的超速离心机,通常使用柔性轴代替刚性轴。柔性轴限制了由于转子的任何不平衡或离心机内样品负载的不良分布而产生的振动传递到离心机的框架。
7.必须小心平衡高速应用中,例如在超过每分钟数万转的速度下,使用的转子以便减少转子在高速旋转期间引起振动的趋势。当转子以高速操作时,转子负载的质量的变化可能会导致不期望的力不平衡。这种力不平衡会拉紧主轴,并且可能导致离心机损坏、效率低下、过度磨损和不希望的噪声。用于使用刚性主轴操作的转子的常规平衡技术使用全部都具有同一重体的样品和平衡管的组合或没有添加平衡管的其它各种平衡模式。
8.诊断装置或平衡机器,如由弗吉尼亚州林奇堡美国霍夫曼公司(american hofmann corporation of lynchburg,virginia)或由纽约迪尔派克申克公司(schenck corporation of deer park,new york)商业销售的诊断装置或平衡机器,可以用于检测通常安装在刚性主轴上的转子中的转子不平衡并且还可以用于标识转子主体上需要额外重体来平衡转子的具体位置。然后,在所标识的位置处在转子主体中手动钻出孔,并且根据由诊断装置提供的信息将重体压配到孔中。重体可以是例如各自具有特定质量以补偿由诊断装置检测到的不平衡的圆柱形金属主体。
9.可能需要在转子的整个寿命中多次重新平衡转子。例如,随着转子老化和磨损,转子的质量分布可能改变,使得需要重新平衡转子。当这种情况发生时,通常必须从先前钻出
的孔中移除先前安装的重体。然后在转子主体上钻出新孔,并将重体压配到新孔中。因此,先前钻出的孔被弃用。出于结构和/或美观目的,通常期望塞住先前钻出的孔,这需要修复转子主体。每次重新平衡转子时,重复在转子主体中钻出新孔并修复转子主体以塞住先前钻出的孔的循环。
10.因此,将期望提供用于平衡转子的改进的系统和方法,所述系统和方法解决了与常规转子相关联的这些和其它问题,尤其对于如超速离心机等高速离心机中使用的转子。
技术实现要素:
11.在本发明的一实施例中,提供了一种转子。所述转子包含:转子主体,所述转子主体具有旋转轴线;以及多个平衡孔口,所述多个平衡孔口绕所述旋转轴线周向布置。所述平衡孔口中的每个平衡孔口被配置成选择性地收纳重体。
12.在本发明的一方面,所述转子主体可以进一步包含多个周向隔开的管状腔体和所述平衡孔口在其中形成的盖。每个管状腔体可以具有开口端,所述开口端被配置成收纳样品容器。所述盖可以由所述转子主体支撑并且被配置成当所述盖被定位在所述转子主体上时覆盖所述管状腔体的所述开口端。
13.在本发明的另一方面,所述盖可以进一步包含顶表面和与所述顶表面相对的底表面,并且所述平衡孔口可以形成在所述顶表面或所述底表面之一中。
14.在本发明的另一方面,所述平衡孔口中的至少一个平衡孔口可以收纳至少一个重体。
15.在本发明的另一方面中,所述至少一个重体可以是包含螺纹外表面的螺钉,并且所述平衡孔口中的每个平衡孔口可以包含螺纹内表面,所述螺纹内表面被配置成螺纹接合所述重体。
16.在本发明的另一方面,每个平衡孔口距所述旋转轴线的径向距离可以与其它平衡孔口距所述旋转轴线的径向距离相同。
17.在本发明的另一方面,每个平衡孔口可以与角向相邻的平衡孔口中的每个角向相邻的平衡孔口间隔开相同的角向距离。
18.在本发明的另一方面,所述平衡孔口可以是共面的。
19.在本发明的另一方面,所述转子主体可以进一步包含上表面和与所述上表面相对的下表面,其中所述上表面包含第一环形凹槽。所述转子可以进一步包含平衡环,所述平衡环定位在所述第一环形凹槽中,并且所述平衡环可以包含平衡环上表面,所述平衡孔口形成在所述平衡环上表面中。
20.在本发明的另一方面,所述转子主体可以包含细长镗孔,所述细长镗孔沿所述旋转轴线在所述转子主体的所述上表面与所述转子主体的所述下表面之间延伸,并且所述转子可以进一步包含驱动轮毂、盖螺钉、盖和弹性构件。所述驱动轮毂可以安装在所述细长镗孔内并且可以包含向上突出穿过所述细长镗孔的圆柱形轴和具有螺纹外表面的上部部分。所述盖螺钉可以包含下部镗孔和盖螺钉凸缘,所述下部镗孔具有被配置成螺纹接合所述驱动轮毂的所述螺纹外表面的螺纹内表面,所述盖螺钉凸缘从所述盖螺钉的下端径向向外延伸。所述盖可以包含壁部分,所述壁部分径向向外延伸并且具有带有第三环形凹槽的下表面。所述弹性构件可以定位在所述第三环形凹槽内并且可以响应于所述盖螺钉与所述驱动
轮毂的螺纹接合而压靠所述平衡环上表面。
21.在本发明的另一方面,所述第一环形凹槽可以包含肩部,并且所述平衡环可以包含径向向内突出以接合所述肩部的平衡环凸缘。
22.在本发明的另一方面,所述转子主体可以包含周向侧壁,并且所述转子可以进一步包含在所述周向侧壁周围延伸的加强件。
23.在本发明的另一方面,所述加强件可以在所述转子主体的所述周向侧壁周围和上方延伸以限定具有所述第一环形凹槽的通道,并且所述平衡环可以定位在所述通道中。
24.在本发明的另一方面,所述周向侧壁可以包含周向凹部,并且所述加强件可以与所述周向凹部吻合。
25.在本发明的另一方面,所述平衡环可以通过粘合剂、收缩配合或所述粘合剂和所述收缩配合两者操作性地连接到所述第一环形凹槽。
26.在本发明的另一方面,所述转子主体可以由聚合物复合物、碳纤维材料或所述聚合物复合物和所述碳纤维材料两者构造而成。
27.在本发明的另一方面,提供了一种用于平衡包含多个孔口的转子的方法,每个孔口被配置成选择性地收纳重体。所述方法包含检测在离心机中旋转所述转子时所述转子的不平衡,并且响应于检测到所述不平衡,选择性地将平衡重体安装在选定平衡孔口中。
28.在本发明的一方面,检测所述不平衡可以包含标识所述转子的临界速度,以及确定在小于所述临界速度的测试速度下所述转子中的不平衡。
29.在本发明的另一方面,所述临界速度可以为多个临界速度之一,并且可以对于多个测试速度中的每个测试速度确定所述转子的所述不平衡,其中每个测试速度为所述多个临界速度中的相应临界速度的分数。
30.在本发明的另一方面,标识所述临界速度可以包含:对于多个旋转速度,在所述旋转速度下旋转所述转子;在所述转子以所述旋转速度旋转时向所述转子施加外力;测量和记录所述转子对所述外力的振动响应;以及基于所述振动响应确定所述转子的本征频率。所述方法然后可以基于所述本征频率标识所述转子的一个或多个临界速度。
31.在本发明的另一方面,将所述平衡重体选择性地安装在所述选定平衡孔口中可以包含测量在第一测试速度下所述转子的不平衡;在参考定位处将试验重体安装在平衡孔口中;以及在所述试验重体安装在所述参考定位处的情况下测量在所述第一测试速度下所述转子的所述不平衡。所述方法然后可以包含重复地将所述试验重体移动到与当前平衡孔口相隔预定角向距离的下一个平衡孔口并且测量所述第一测试速度下所述转子的所述不平衡,直到所述下一个平衡孔口将处于或超出所述参考定位。基于测得的不平衡,所述方法然后可以确定第一目标位置和要在所述第一目标位置处添加以平衡所述转子的第一目标质量。
32.在本发明的另一方面,所述方法可以进一步包含:确定由所述第一目标质量在所述第一目标位置处提供的第一平衡矢量,选择位于所述第一目标位置的一侧上的第一平衡孔口和位于所述第一目标位置的另一侧上的第二平衡孔口;以及确定第一平衡质量和第二平衡质量,所述第一平衡质量和所述第二平衡质量在分别被放置在所述第一平衡孔口和所述第二平衡孔口中时提供与所述第一平衡矢量等效的第二平衡矢量。
33.在本发明的另一方面,所述方法可以进一步包含:将具有所述第一平衡质量的第
一重体安装在所述第一平衡孔口中;将具有所述第二平衡质量的第二重体安装在所述第二平衡孔口中;以及在所述第一重体安装在所述第一平衡孔口中并且所述第二重体安装在所述第二平衡孔口中的情况下测量所述第一测试速度下的所述不平衡。
34.在本发明的另一方面,所述方法可以进一步包含:测量在高于所述第一测试速度的第二测试速度下所述转子的所述不平衡;在所述参考定位处将所述试验重体安装在所述平衡孔口中;以及在所述试验重体安装在所述参考定位处的情况下测量在所述第二测试速度下所述转子的所述不平衡。所述方法可以进一步包含重复地将所述试验重体移动到与所述当前平衡孔口相隔所述预定角向距离的所述下一个平衡孔口并且测量所述第二测试速度下所述转子的所述不平衡,直到所述下一个平衡孔口将处于或超出所述参考定位。基于测得的不平衡,所述方法然后可以确定第二目标位置和要在所述第二目标位置处添加以平衡所述转子的第二目标质量。
35.在本发明的另一方面,所述方法可以进一步包含:确定所述第一目标位置处的所述第一目标质量和所述第二目标位置处的所述第二目标质量的组合的第二平衡矢量;以及确定第三目标质量和第三目标位置,所述第三目标质量和所述第三目标位置提供与所述第二平衡矢量等效的第三平衡矢量。
36.在本发明的另一方面,所述方法可以进一步包含:选择位于所述第三目标位置的一侧上的第三平衡孔口和位于所述第三目标位置的另一侧上的第四平衡孔口;以及确定第三平衡质量和第四平衡质量,所述第三平衡质量和所述第四平衡质量在分别被放置在所述第三平衡孔口和所述第四平衡孔口中时提供与所述第三平衡矢量等效的第四平衡矢量。
37.在本发明的另一方面,所述方法可以进一步包含:将具有所述第三平衡质量的第三重体安装在所述第三平衡孔口中;将具有所述第四平衡质量的第四重体安装在所述第四平衡孔口中;在所述第三重体安装在所述第三平衡孔口中并且所述第四重体安装在所述第四平衡孔口中的情况下测量所述第二测试速度下的所述不平衡;以及将在所述第二测试速度下测得的所述不平衡与在所述第一测试速度下测得的所述不平衡进行比较。
38.以上发明内容呈现了本发明的一些实施例的简化概述以提供对在此讨论的本发明的某些方面的基本理解。发明内容不旨在提供对本发明的广泛概述,也不旨在标识任何关键或重要元素或描绘本发明的范围。发明内容的唯一目的仅仅是以简化形式呈现一些概念,作为对下面呈现的具体实施方式的介绍。
附图说明
39.并入本说明书中并且构成本说明书的一部分的附图展示了本发明的实施例并且与以上给出的对本发明的一般描述和以下给出的详细描述一起用来解释本发明。
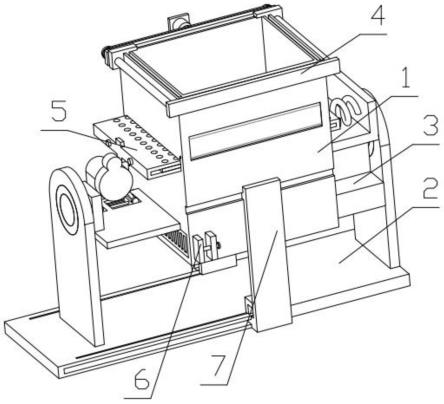
40.图1是根据本发明的示例性实施例的包含具有盖的转子的离心机的透视图。
41.图2是图1的转子的透视图。
42.图3是图2的转子的分解透视图。
43.图4-4d是图1-3的盖的底部透视图,其示出了安装在盖的各个平衡孔口中的各个重体。
44.图5是图2的转子的横截面视图。
45.图6是图5的转子的一部分的详细视图,其示出了安装在盖的底表面中的平衡重
体。
46.图7是图4的盖的替代性实施例的透视图,其示出了盖的顶表面中的多个平衡孔口。
47.图8是图7的转子的一部分的详细视图,其示出了安装在盖的顶表面中的平衡重体。
48.图9是展示了根据本发明的实施例的可以执行以平衡转子的示例性方法的流程图。
49.图9a-9c是展示了可以通过图9的方法实施的示例性子方法的流程图。
50.图10是根据本发明的另一示例性实施例的转子的透视图。
51.图11是图10的转子的分解透视图,其示出了转子主体、平衡环、驱动轮毂和转子的盖。
52.图12是示出图11的盖的额外细节的透视图。
53.图13是示出图11的转子主体的额外细节的顶部透视图。
54.图14是示出图11的转子主体和驱动轮毂的额外细节的底部透视图。
55.图15是图10的转子的横截面视图。
56.图16是图15的转子的一部分的分解横截面视图,其示出了盖、平衡环和转子主体的额外细节。
57.图17和18是图10的转子的顶部视图,其中盖被移除。
58.图19是展示了根据本发明的实施例的经模态平衡的转子的振动数据的曲线视图。
59.图20是用于产生图19的数据的转子的透视图。
60.图21-24是展示了不平衡转子、经常规平衡的转子和经模态平衡的转子的振动数据的图形视图。
61.图25是根据本发明的实施例的可以用于实施一个或多个方法的计算机的示意视图。
具体实施方式
62.图1到6描绘了根据本发明的实施例的转子102(例如,8
×
100ml容量的固定角转子)的示例性盖212。盖212包含多个平衡孔口432,每个平衡孔口被配置成选择性地收纳可以与盖212可移除地接合的试验重体433或平衡重体436。如以下更详细地描述的,平衡重体436可以选择性地定位在盖212上的多个预定位置中,以根据模态平衡方法平衡转子102。
63.图1描绘了根据本发明的实施例的示例性离心机100。离心机100包含壳体101、驱动马达106、转子驱动轴或主轴104以及安装在主轴104上的转子102。在操作中,驱动马达106使主轴104旋转,这进而向转子102提供了旋转扭矩以使转子102以期望的速度旋转。
64.根据所使用的离心机100的类型,如以直到15,000rpm、超过15,000rpm直到40,000rpm、超过40,000rpm直到90,000rpm或超过90,000rpm的最大速度操作的离心机,主轴104可以是刚性的或柔性的。刚性主轴104可以用于低速离心机100。然而,对于以例如50,000rpm或更高的高速度操作的那些离心机100,可以使用柔性主轴104来减少在离心期间振动的传递。传感器108,如加速度计,可以操作性地联接到离心机100或其组件,并且可以被配置成测量振动。例如,传感器108可以在支撑旋转主轴104的轴承处附接到马达106。传感
器108可以尽可能靠近轴承放置,并且可以优选地与轴承位于同一平面内,以便获得在转子102旋转期间轴承处的振动信号的准确测量结果。
65.图2、3和5描绘了根据本发明的实施例的示例性转子102。转子102包含转子主体210和转子轮毂322。转子轮毂322被配置成将扭矩从主轴104转移到转子主体210。转子轮毂322可以由如钛等金属材料构成,并且包括头部部分548和从头部部分548轴向向上延伸的细长轴部分546。轴部分546包含螺纹外表面550、螺纹内表面552和面向内的周向表面544。面向内的周向表面544可以沿转子轮毂322的部分长度径向向内和向下逐渐变窄。转子轮毂322可以通过轮毂保持器320固定到转子主体210,所述轮毂保持器与转子轮毂322的轴部分546的螺纹外表面550操作性地联接。在转子轮毂322插入穿过转子主体210之后,轮毂保持器320可以旋钮到轴部分546的螺纹端上。
66.转子102还包含示例性盖212,所述盖可移除地联接到转子轮毂322以便覆盖转子主体210。盖212通常是盘形的并且包含中心镗孔551和用于收纳o形环430的环形外周凹槽429。当盖212可移除地联接到转子主体210时,o形环430可以提供盖212与转子主体210之间的流体密封。盖212可以由碳纤维材料、金属材料或任何其它合适的材料构造而成。例如,盖212可以由树脂涂覆的碳纤维层压材料层压缩模制。转子主体210和盖212还可以包含指示指定参考位置213的相应指示符(例如,箭头438、440)。参考位置213可以指定转子主体210和盖212上的特定位置,使得盖212可以相对于转子主体210在同一参考位置213处对齐。参考位置213可以用标记或指示符在转子主体210和盖212两者上标识。尽管在图2中描绘了参考箭头,但应当理解,可以通过向用户指示在哪里对齐转子主体210和盖212的任何合适的方式在转子主体210和盖212上标识参考位置213。
67.如图3、5、6和8所示,盖212可以通过盖螺钉214可移除地联接到转子主体210。示例性盖螺钉214包含上部凸缘554、螺纹下部外表面556和轴向延伸穿过盖螺钉214的多级镗孔558。盖螺钉214可以包含面向外的周向表面542,所述周向表面沿盖螺钉214的部分长度径向向内和向下逐渐变窄。周向表面542可以由此被配置成当盖螺钉214与转子主体210接合时面对转子轮毂322的面向内的周向表面544。如所示出的,螺纹下部外表面556可以由轮毂322的螺纹内表面552收纳并且螺纹接合所述螺纹内表面,使得上部凸缘554将垫圈316压靠在盖212上。保持夹318可以通过将盖212夹置在两个垫圈316之间来将盖螺钉214、垫圈316和盖212固持在一起。当通过盖螺钉214与毂322接合以及保持夹318与盖212接合而联接到转子主体210时,盖212可以覆盖多个管状腔体540和容纳在其中的样品容器。盖212可以由此阻止存取固持在腔体540中的样品容器,如在高速旋转期间。以上描述的转子安装组件中的每个转子安装组件可以由任何合适的金属或非金属材料制成。
68.图4描绘了根据本发明的实施例安装的具有试验重体433的示例性盖212。盖212可以由转子主体210支撑并且被配置成覆盖转子主体210的顶部,如图5中最佳示出的。盖212包含顶表面426、与顶表面426相对的底表面424以及在顶表面426与底表面424之间延伸的面向外的周向侧壁428。周向侧壁428从盖212的顶表面426近侧径向向内和向下逐渐变窄。周向侧壁428可以相对于盖212的顶表面426以范围为约10
°
到30
°
的锥角逐渐变窄。优选地,周向侧壁428可以相对于盖212的顶表面426以约10
°
的锥角逐渐变窄。盖212还可以包含由盖212的周向侧壁428支撑的o形环430。盖212还可以包含环形脊434,所述环形脊从盖212的顶表面426和底表面424延伸以限定被配置成容纳垫圈316的腔体。
69.盖212可以进一步包含在盖212上彼此周向间隔开的多个平衡孔口432。每个平衡孔口432可以包含螺纹内表面并且具有统一构型。也就是说,平衡孔口432中的每个平衡孔口可以具有例如相同的深度、横截面尺寸或螺纹间距。因此,平衡孔口432中的每个平衡孔口可以被配置成螺纹收纳相同类型的平衡重体436或试验重体433。平衡孔口432可以位于盖212的底表面424、顶表面426或两个表面424、426上。
70.图4中最佳示出的示例性实施例包含位于盖212的底表面424上的二十四个平衡孔口432。平衡孔口432围绕中心镗孔551以相等的周向间隔彼此周向间隔开。因此,平衡孔口432限定盖212上用于收纳平衡重体436或试验重体433的预定位置。然而,可以使用任何合适的间隔的任何合适数量的平衡孔口432。因此,盖212的横向尺寸可能影响平衡孔口432的可用表面积,并且可以增加以提供额外的表面积以容纳更多数量的平衡孔口432。应当理解,平衡孔口432的数量可以与用于安装平衡重体436或试验重体433的选项的数量相关。因此,平衡孔口432的数量可以与对盖212的重心的控制程度相关,这可能会影响转子102的稳定性。图4描绘了安装在被称为参考位置213的平衡孔口432中的单个试验重体433。应进一步理解,安装在盖212中的平衡重体436的数量可以根据要校正的转子102的不平衡的量而变化。
71.转子102的重心与旋转轴线不重合的任何时候都可能发生不平衡。由不平衡产生的力可以表征为:
72.f
不平衡
=m
×
ε
×
ω273.其中m是转子的质量,ε是重心与转子的旋转轴线的径向偏移量(或“偏心率”),(m
×
ε)是不平衡,f
不平衡
是由不平衡引起的力,并且ω是以弧度/秒为单位的旋转速度。旋转速度ω通过以下给出:
[0074][0075]
其中n=旋转速度,以rpm为单位。不平衡矢量通过重心从旋转轴线向外引导,并且因此与转子102同步围绕旋转轴线旋转。因此,可以通过在产生平衡矢量的一个或多个定位中向转子添加一定量的质量来平衡转子102。也就是说,为了完全平衡转子102,平衡矢量在量值方面应与不平衡矢量相等并且在相位上相反。
[0076]
在图4-4d所描绘的实施例中,应当理解,参考位置213可以与图1-3中描述的参考位置213相对应,但位于盖212的直接相对侧(底表面424)上。图4a和4b描绘了图3的盖212的底部透视图。图4a描绘了安装在位于与图4中安装的试验重体433的参考位置213成120度(θ)的平衡孔口432中的试验重体433。图4b描绘了安装在位于沿顺时针方向与图4中安装的试验重体433的位置成240度(2θ)或沿顺时针方向与图4a中安装的试验重体433的参考位置213成120度(θ)的平衡孔口432中的试验重体433。
[0077]
图4c和4d各自描绘了图3的盖212的底部透视图。图4c示出了安装在平衡孔口432中的一个平衡重体436,并且图4d示出了安装在相邻平衡孔口432中的两个平衡重体436。安装在盖212的平衡孔口432中的平衡重体436的数量可以取决于转子102的不平衡的量。安装的平衡重体436的数量可以变化,从几乎没有到与盖212上存在的平衡孔口432的数量一样多。
[0078]
每个平衡重体或试验重体可以包括定位螺钉,所述定位螺钉包含螺纹外表面、近
端和远端。定位螺钉的近端与远端之间的距离可以限定重体的长度。可以在近端设置六角套筒或其它合适的键接镗孔以收纳工具,如艾伦扳手(allen wrench),以辅助将重体推进到平衡孔口432之一中或推动出平衡孔口之一。重体的螺纹外表面可以允许重体被插入到平衡孔口432中的任何平衡孔口中或从任何平衡孔口中移除,而不会对盖212造成损坏。虽然重体433、436和平衡孔口432在此中被描绘为螺纹的使得重体可以与平衡孔口432中的一个或多个平衡孔口可移除地接合,但本发明的实施例不如此限制。因此,重体433、436可以通过任何合适的方式与盖212可移除地接合。在一些实施例中,可以提供具有各种不同长度或质量的多个平衡重体436,使得具有不同平衡特性的平衡重体436可以选择性地定位在特定的平衡孔口432中以实现自定义的平衡。应当理解,还可以采用其它合适的装置,例如压配定缝销。因此,本发明的实施例不限于所描绘的示例性试验重体和平衡重体。
[0079]
虽然平衡重体436、试验重体433和对应平衡孔口432已经相对于所图示的盖212和转子102进行了描述,但是平衡重体436、试验重体433和平衡孔口432可以并入到任何合适的盖中。在替代性实施例中,平衡孔口432可以包含在转子主体210中,如位于转子主体210的环形边缘439的顶部环形表面437中。平衡重体436、试验重体433和平衡孔口432还可以并入到各种设计的其它碳纤维转子或由不同材料构造而成的转子中。
[0080]
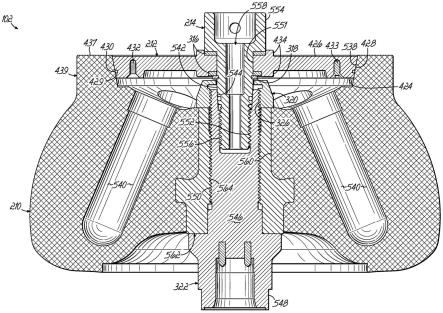
图5描绘了根据本发明的实施例的转子102的侧横截面视图。转子102包含关于由转子轮毂322限定的旋转轴线对称的转子主体210。容纳在样品容器(未示出)中的样品可以围绕旋转轴线定位在转子主体210中并且离心旋转。所图示的转子主体210包含中心镗孔560,所述中心镗孔用于收纳孔可以与转子主体210共同模制的转子插入件562。转子插入件562包含螺纹中心镗孔564,所述螺纹中心镗孔被配置成至少操作性地接合轮毂322的螺纹轴部分550以使转子主体210牢固地就座在轮毂322上。
[0081]
转子主体210可以包含多个腔体540。在本发明的一实施例中,所述多个腔体540可以包括多个周向隔开的管状腔体,每个管状腔体具有被配置成收纳样品容器的开口端。所述多个腔体540中的每个腔体都可以从上部腔体延伸到转子主体210中,并且可以被适当地大小设定和形状设定为收纳样品容器中的至少一个样品容器以用于围绕旋转轴线离心旋转。尽管图1-3、5、6和8中描绘的示例性转子102具有8个各自被大小设定为接接纳100ml样品容器的腔体540,但是应当理解可以使用任何合适数量的腔体540,并且腔体540可以被配置成适合各种大小的样品容器。如本文所使用的,术语“管状”可以指任何合适的横截面形状,包含例如但不限于圆形形状(例如,椭圆形、圆形或圆锥形)、四边形形状、规则多边形或不规则多边形形状或任何其它合适的形状。因此,术语“管状”不旨在限制于图中所展示的示例性腔体540的大致圆形横截面轮廓。
[0082]
在一个实施例中,转子主体210可以由聚合物复合物构造而成。例如,转子主体210可以由树脂涂覆的碳纤维层压材料层压缩模制。应当理解,转子主体210也可以使用各种其它材料并且通过各种其它方法形成。例如,转子主体210可以由不连续树脂涂覆的碳纤维片或不连续碳纤维片和堆叠碳层压层的组合压缩模制。
[0083]
在转子主体210与转子轮毂322操作性地接合的情况下,轮毂保持器320可以可移除地紧固到轮毂322上,以进一步促进将转子主体210、转子轮毂322和插入件562相对于彼此固持在适当位置。在此方面,轮毂保持器320可以包含内部螺纹镗孔326,所述内部螺纹镗孔用于至少收纳并螺纹接合轮毂322的轴部分546的螺纹外表面550。
[0084]
图6描绘了图5的转子102的一部分的详细视图,其展示了盖212与转子主体210之间的界面。盖212可以包含在盖212的周向侧壁428中就座于环形外周凹槽429中的o形环430。盖212可以被配置成装配在转子主体210的面向内的周向侧壁538内,使得盖212抵靠周向侧壁538搁置。优选地,盖212可以形成为使得当盖212抵靠转子主体210的周向侧壁538搁置时,在盖212与周向侧壁538之间存在不妨碍盖212的移除的滑动接触。为了产生紧密密封,如先前所述可以由盖螺钉214迫使盖212向下抵靠周向侧壁538。响应于被压缩,o形环430可以径向膨胀,使得其压靠盖212的周向侧壁428和转子主体210的周向侧壁538,由此产生密封。盖212由此可以被牢固地密封在转子主体210的上端近侧,但是可通过拧下盖螺钉214以释放施加在盖212上的向下的力而容易地移除。当由盖螺钉214施加的力被释放时,o形环430可以从转子主体210的周向侧壁538抽回,使得盖212与转子主体210的周向侧壁538之间仅存在滑动接触。然后可以容易地移除盖212。
[0085]
图6还示出了平衡重体436在盖212的平衡孔口432内的朝向。在所描绘的实施例中,平衡孔口432位于盖212的底表面424上。因此,必须在将盖212固定到转子主体210之前将平衡重体436安装在盖212的平衡孔口432中。为了在盖212中添加、移除或移动平衡重体436或试验重体433,必须移除盖212。图7描绘了盖212的替代性实施例,其中平衡孔口432位于盖212的顶表面426上。在此实施例中,在模态平衡过程期间可能不需要移除和更换盖212。
[0086]
图8描绘了以图7的盖212为特征的转子102的实施例的详细视图,其中平衡孔口432位于盖212的顶表面426上。详细视图示出了盖212与转子主体210之间的界面以及平衡重体436在盖212的平衡孔口432内的朝向。
[0087]
图9描绘了展示了用于在离心机100中平衡转子102的示例性模态平衡方法945的流程图。离心机可以具有自然谐波共振频率,这会在某些临界速度下产生驻波图案。这些驻波模式通常被称为“临界模态”。有利地,通过使转子中的不平衡最小化,可能不中断地通过这些临界模态并且实现离心机在高速下的平稳操作。方法945可以检测在所标识的临界模态下发生的转子102中不平衡,并且标识其在目标参考位置处的添加有助于适当平衡转子102的重体在盖212上的至少一个目标参考位置和的至少一个对应目标量。尽管所展示的方法945可以用于平衡转子102,包含图4-8中所展示的盖212的各个实施例中的任何实施例,但为了清楚起见,参考可能限于盖212的特定实施例。
[0088]
在框946中,方法945确定转子102可能未经平衡的一种或多种临界模态。方法945然后可以进行到框956并且在离心机100中以某一测试速度,例如以最低临界速度的分数旋转转子102,所述某一测试速度为离心机100进入在框946中确认的临界模态之一的临界速度的分数(例如,3/4或75%)。测试速度可能小于临界速度,因为以临界速度旋转转子102可能由于在处于临界模态时经历的不平衡的强度而损坏离心机100。可以存在对于转子102旋转的测试速度来说可接受的值范围。例如,转子102可以以介于临界速度的70%与95%之间的速度旋转。例如,转子102可以以临界速度的70%或85%旋转。
[0089]
在框958中,方法945可以校正在框956中转子102旋转的测试速度下转子102的不平衡。校正以测试速度确定的不平衡可以允许转子102以比校正不平衡之前的速度更高的速度旋转。
[0090]
在框982中,方法945可以在离心机100中以另一测试速度旋转转子102,所述另一
测试速度为在框946中确定的另一(例如,更高的)临界速度的分数。如先前所述,转子102可以以低于其它临界速度的此其它测试速度旋转以避免损坏离心机100。在框984中,方法945可以校正在框982中转子102旋转的其它测试速度下转子102的不平衡。
[0091]
在框986中,方法945可以以又另一测试速度旋转转子102,所述又另一测试速度为在框946中确定的又另一临界速度(即,比前一临界速度高的临界速度)的分数,条件是另一临界速度可用。在框988中,方法945可以再次校正在框986中转子102旋转的测试速度下转子102的不平衡。因此,方法945可以迭代地使转子旋转到临界速度的分数,校正在所述速度下发生的任何不平衡,并且然后选择平衡转子的另一临界速度。此方法可以继续,直到达到期望的平衡水平。应当理解,平衡运行的数量可以变化(例如,可以少于或多于三次运行)。例如,在一些情况下,方法945可能仅需要执行一次平衡运行就能实现期望的平衡水平。
[0092]
在框990中,方法945可以评估转子102在离心机100中在目标速度下的平衡。目标速度可以优选地是用户通常将操作离心机100的旋转速度。在一替代性实施例中,目标速度可以是离心机100的最大操作速度,这可以取决于所使用的离心机100的类型。
[0093]
图9a描绘了展示了示例性子方法947的流程图,所述子方法可以用于在框946中确定转子系统的临界模态。在框948中,子方法947可以向离心机100的组件,例如马达106施加外力。外力可以包含预定频带中的频率。用于施加外力的一种方式可以是将由模态激振器产生的啁啾或正弦扫频信号操作性地耦接到马达106。在一替代性实施例中,外力可以通过由仪表化锤递送到马达106的脉冲负载冲击提供。还可以使用向马达106或离心机100的具有预定频带中的频率分量的其它组件施加外力的其它方式。
[0094]
在框950中,子方法947可以测量转子102对所施加的外力的振动响应。振动响应可以在转子102在离心机100中旋转时在支撑旋转主轴104的马达轴承处测量。振动响应的测量结果可以在转子102的选定旋转速度下提取。例如,振动响应的测量结果可以以1,000rpm直到离心机100的典型或最大操作速度的间隔提取。可以通过传感器108在选定旋转速度中的每个选定旋转速度下测量轴承对外力的振动响应。传感器108的输出操作性地耦接到用于分析输出信号的合适装置,如运行动态信号分析器或数字数据记录器软件的计算机。
[0095]
在框952中,子方法947可以绘制或以其它方式分析框950中获得的所测得的振动响应数据,作为振动响应被记录的转子102的旋转速度和所施加的力的频率两者的函数。可以例如通过使用模态激振器以通过跨预定频带扫频的啁啾或正弦波产生外力来获得用于生成绘图的数据。所述绘图可以是作为旋转速度和激励频率的函数的转子的实验测得的振动响应的瀑布图,其通常被称为坎贝尔图(campbell diagram)。坎贝尔图通常包含多个切片,每个切片对应于转子102的旋转速度并且描绘了在所述旋转速度下检测到的振动的频率功率谱。每个切片可以包含与所述旋转速度下转子的本征频率相对应的峰。随着旋转速度接近临界模态,本征频率下振动的强度可能会增加。
[0096]
在框954中,子方法947可以基于坎贝尔图标识转子102的一个或多个临界旋转频率(即,临界速度)。在本发明的示例性实施例中,临界速度可能出现在5,000rpm、37,000rpm和55,000rpm下。根据转子102的本征频率,可以通过计算机分析标识转子102的临界模态。转子102的临界模态可能出现在轴承处的振动最严重的旋转速度下。正是在这些旋转速度下,转子102的不平衡可能最大。因此,这些旋转速度是转子102将需要进一步平衡的旋转速度。在知道转子102的平衡需要校正的速度的情况下,方法945可以继续确定在哪里放置平
衡重体436。
[0097]
图9b描绘了展示了示例性不平衡校正子方法963的流程图,所述子方法可以用于校正方法945的框958、984和988中在临界速度的分数,例如5,000rpm、37,000rpm或55,000rpm的分数下的转子不平衡。每次使用子方法963以校正在随后的临界速度(例如,37,000、55,000)下的转子不平衡时,根据初始或前一临界速度(例如,5,000rpm)确定的结果,校正动作可能在至少一个细节方面有所不同,如以下详细描述的。
[0098]
在框960中,子方法963可以使转子102以初始测试速度旋转,所述初始测试速度是初始临界速度的分数。有利地,通过使用作为初始临界速度的分数的测试速度,子方法963可以避免由于在临界模态下操作可能经历的不平衡水平的强度而损坏离心机100。
[0099]
在框962中,子方法963可以测量并记录在转子102以初始测试速度旋转时所经历的转子102的不平衡。转子102的不平衡可以例如通过传感器108测量。为此,子方法963可以确定测得的振动响应的功率谱图的均方根(“rms”)值。功率谱图的rms值可以被记录并且可以是用于确定转子的不平衡的优选测量结果参数。
[0100]
在子方法963的框964中,可以在盖212上的参考位置213处将具有已知质量的试验重体433安装在平衡孔口432中。优选地,试验重体433在质量上可以与用于平衡转子102的平衡重体436相似。参考位置213可以是周向位于盖212的边缘周围的平衡孔口432中的任何平衡孔口的位置。一旦选择了参考位置213,就应当使用同一参考位置213,并且盖212应保持在相对于转子主体210一致的周向定位中,以进行平衡过程的其余部分。
[0101]
在框966中,子方法963再次在试验重体433就位的情况下以初始临界速度的分数旋转转子102。一旦转子102达到速度,子方法963就进行到框968并且再次测量和记录在转子102以此速度旋转时转子的不平衡。子方法963然后可以确定并记录测得的振动响应的功率谱的rms值。
[0102]
在子方法963的框970中,试验重体433可以从参考位置213移动到另一个平衡孔口432。在一个实施例中,试验重体可以移动到从盖212上的前一位置沿顺时针方向偏移120度的平衡孔口。将试验重体移动120度可以允许子方法963通过三次运行来校正转子不平衡。在替代性实施例中,试验重体433每次可以沿顺时针方向移动60
°
,在这种情况下,子方法963可能需要执行六次运行。在又另一实施例中,试验重体433每次可以沿顺时针方向移动90度,在这种情况下,子方法963可以包含四次运行。以较小增量移动试验重体433并且执行更多次运行的子方法963的实施例可以具有更多用于根据其决定将选定平衡重体436放置在何处的数据。然而,已经确定径向位移120度的三次测量结果通常足以确定选定平衡重体436的定位和质量。
[0103]
响应于试验重体433被移动,子方法963可以进行到框972并且以临界速度的分数旋转转子102。一旦转子102达到速度,子方法963就可以进行到框974,测量并记录转子102的不平衡,确定振动的功率谱含量的rms值,并且记录rms值。
[0104]
子方法963可以返回到框970并且迭代地重复移动试验重体433、旋转转子102以及测量和记录不平衡数据,直到试验重体已经被放置在盖212中的多个定位中的每个定位中为止。对于120度的增量偏移角,可以执行一次额外运行,使得试验重体433从其在盖212上的前一位置移动另一个120度,即从原始参考位置213移动240度。每次运行都会提供额外的不平衡数据点。来自安装在盖212上的三个位置处的试验重体433的不平衡数据与没有试验
重体433的盖212的初始不平衡信息一起可以向用户提供确定在盖212上平衡重体436应安装在哪里以及平衡重体436应该具有什么质量以抵消转子102的固有不平衡所需的信息。增量偏移角θ可以被选择为使得360度是偏移角θ的整数倍。也就是说,增量偏移角θ=360/n,其中n为大于一的整数。
[0105]
在已经收集了足够的不平衡数据后,子方法963可以进行到框976并且求解方程组以确定在盖212上平衡重体436应安装在哪里以及平衡重体436应具有什么质量。在一个实施例中,待求解的方程组可以包括以下三个方程:
[0106][0107][0108][0109]
其中α被定义为影响系数,其为平衡重体436除以试验重体433的比率,u=ε
·
m被定义为不平衡,ε是质量相对于旋转的中心线的偏心率,并且m是转子102的质量。转子102的不平衡可以表示为具有一定量值和相位的矢量。以矢量形式,转子102的不平衡可以写为:
[0110][0111]
例如,转子102的初始不平衡的值可以利用以上提到的方程以矢量形式表示,如:例如,转子102的初始不平衡的值可以利用以上提到的方程以矢量形式表示,如:如方程所示,不平衡矢量可以分解为其组成部分—不平衡的量值|a0|和相对于所选参考位置213的不平衡的相位对于将试验重体433引入到转子102中的每种情况的不平衡的值,可以进行相同的操作。然而,对于将试验重体433引入到转子102中的每种情况,可以减去转子102本身固有的初始不平衡的值,以便通过在指定位置处添加试验重体433来确定向转子102添加的不平衡的额外“量”。通过以方程4的形式写入不平衡矢量中的每个不平衡矢量(即,在量值和方向方面)并且求解如方程1-3中示出的方程组,可以确定所需的平衡重体436的半径(r)和相位(φ)。根据确定的半径(r),可以使用以下方程来确定平衡重体436所需的重量:
[0112][0113]
其中wc是平衡重体436的质量,并且tw是用于测试转子102的试验重体433的质量。上面确定的相位(φ)表示相对于平衡重体436要被安装的所选参考位置213的角度。校正重体的质量wc表示为了在特定模态下平衡转子102要安装的平衡重体436应该有多重。
[0114]
举例来说,假设通过子方法963在测量并记录转子102的不平衡的同时提取了以下测量结果:
[0115]
a0=0.225
[0116]
a1=0.357
[0117]
a2=0.184
[0118]
a3=0.395
[0119]
tw=1.01克
[0120]
将这些测得的数量插入到以上提供的方程中得到以下结果:
[0121]
|r|=0.178
[0122][0123]
取确定的半径(r)的值并将其代入到以上提供的方程中得到:
[0124]
wc=1.44克
[0125]
因此,在特定所选临界模态下平衡转子102所需的平衡重体436应重1.44克并且应被放置在与前一选择的参考位置213成109.57
°
的平衡孔口中。
[0126]
再次参考图9b,在子方法963的框978中,所标识的平衡重体436可以被安装在通过模态平衡方法确定的指定位置处。然后可以选择与目标位置相对应的合适的平衡孔口432,以及重量相对接近通过模态平衡方法确定的重体的目标量的平衡重体436。通常,用户可以取适当质量的平衡重体436并且将其安装在与指定位置相对应的平衡孔口432中。返回参考以上实例,如果正在使用的盖212具有位于与参考位置213成109.57
°
的平衡孔口432,则用户可以简单地将适当质量的平衡重体436安装在所述特定平衡孔口432中。
[0127]
如果盖212不具有具体位于通过模态平衡方法确定的位置处的平衡孔口432,则可以使用矢量计算结果来确定要放置平衡重体436的大致位置。多个平衡重体436的合成平衡矢量可以与指定位置处的单个平衡重体436的平衡矢量等效。返回参考以上实例,如果盖212不具有与参考位置213成109.57度的平衡孔口432,则可以使用矢量计算结果来确定在109.57
°
标记附近的位置;例如,最接近目标位置的两个平衡孔口432处所需的平衡重体436的质量。对于具有24个围绕盖212的边缘彼此周向间隔开15度的平衡孔口432的盖212(如图4所示),选定平衡孔口432可以位于105度和120度处,所述选定平衡孔口是109.57度标记将位于的位置的任一侧上的平衡孔口432。可以计算由将平衡重体436以105度放置在平衡孔口432中和以120
°
放置在平衡孔口432中所产生的矢量。在此实例中,分别来自重1.01克的位于顺时针与参考位置213成105度的平衡孔口432处的一个平衡重体436和重0.44克的位于顺时针与参考位置213成120度的平衡孔口432处的一个平衡重体436的合成矢量将提供与位于与参考位置213成109.57度的1.44克平衡重体436的矢量等效的矢量。在本发明的某些实施例中,平衡重体436可被选择为具有接近计算的质量的预定质量以提供最佳平衡矢量。例如,在以上情况下,质量为1.00克和0.50克的重体可以选自增量为0.25克的预定质量的一组平衡重体。在任何情况下,计算与确定的校正权重wc和相位φ等效的合成矢量的这种方法可以被概括并且用于确定平衡重体436的适当数量、质量和位置。
[0128]
在框980中,子方法963可以在平衡重体436安装在适当的平衡孔口432中的情况下测试转子102以确定平衡是否令人满意。为此,转子102可以旋转到前一确定的临界速度的分数,测量振动响应,并且确定和记录振动响应的功率谱含量的rms值。在开始子方法963之前,可以将此rms值与转子102的不平衡的rms值进行比较。如果平衡正确执行,则平衡之后的不平衡的rms值应小于模态平衡之前的不平衡的rms值。此外,平衡后的不平衡应落入离心机100操作的可接受容差内。
[0129]
再次参考图9,如果供转子102使用的目标速度大于初始临界速度,则方法945可以进行到框982并且使转子102旋转到另一个(例如,下一个增量地更高的)临界速度的分数。在框984中,方法945可以如以上关于子方法963描述的那样校正不平衡,不同之处在于先前向转子102的盖112添加的平衡重体436(如图4c所展示的)或平衡重体436(如图4d所展示的)在模态平衡过程期间保留在所指示的平衡孔口432中。
[0130]
因此,在子方法963的框964中,试验重体433可以安装在盖212的参考位置213处,
其中盖212具有基本上如图4c或图4d所示安装的平衡重体433。在框966中,子方法963可以以下一个(例如,更高的)临界速度的分数旋转转子102。在框970中,试验重体433可以顺时针移动增量偏移角θ,例如120度到达图4a所示的定位。在不平衡校正子方法963的此迭代期间,来自前一模态平衡过程的一个平衡重体436或多个平衡重体436保留在原位。子方法963然后可以进行到框972,并且再次以当前选定临界速度的分数旋转转子102。子方法963由此可以重复以上关于初始临界速度描述的平衡过程,但是以当前选定临界速度并且在来自前一次平衡运行的一个平衡重体436或多个重体436仍在原位的情况下进行。然后可以针对当前模态平衡重复校正以上关于图4c针对初始模态平衡描述的测得的不平衡所需的定位和重体的分析。
[0131]
如果主要关注点在于第二临界速度下或接近第二临界速度的模态平衡,则子方法963可以进行到框978,并且在所标识的一个或多个定位处安装所标识的全部量的平衡重体436。子方法963然后可以进行到框980并且估计和测试初始临界速度下或接近初始临界速度的可能不平衡的量。测试可以包含在初始临界速度和随后的临界速度两者的定义的分数下执行测试平衡。如果初始临界速度下或接近初始临界速度的不平衡的量变得过大,则可以减少平衡重体436的质量并且重新测试两个临界速度下的平衡以确定不平衡是否处于每个旋转速度的可接受水平下。
[0132]
再次参考图9,如果在转子102的期望操作范围内存在一个或多个更高的临界速度,则模态平衡方法945可以进行到框988并重复以上所述的不平衡校正子方法963,但是在平衡重体436在原位的情况下从来自不平衡校正子方法963的每个先前的迭代开始进行。因此,可以对一种或多种临界模态执行校正不平衡的方法直到转子102以这样方式进行了平衡,以在旋转速度的期望操作范围内优化离心机的操作。
[0133]
在前面的描述中进行了参考,其中在模态平衡方法945期间添加了额外平衡重体436,同时将来自不平衡校正子方法963的先前迭代的平衡重体436留在原位。然而,应当理解,通过在移除先前安装的平衡重体436之后使用较少数量的平衡重体436计算并且然后实施等效平衡矢量可以实现相同结果。
[0134]
图9c描绘了可以在框990中通过模态平衡方法945执行的平衡评估子方法991的流程图。平衡评估子方法991可以用于评估转子102在目标速度下的平衡。在框992中,子方法991可以使离心机100以目标速度旋转转子102。目标速度可以是用户打算操作离心机100的旋转速度。可替代地,目标速度可以是离心机100的最大操作速度。离心机100的最大速度可以取决于正在使用的离心机100的类型以及转子102如何很好地平衡。
[0135]
在框994中,子方法991可以测量和记录当转子102在离心机100内以目标速度旋转时所经历的转子102的不平衡,如上所述。子方法991然后可以进行到框996并且在平衡后将目标速度下的记录的不平衡与初始临界速度的记录的不平衡进行比较。为此,可以将目标速度下的不平衡的rms值与在所述速度下平衡转子102之后在初始临界速度的分数下的不平衡的rms值进行比较。
[0136]
在框998中,子方法991可以确定平衡的水平是否充分。例如如果目标速度下的不平衡的rms值大约与在紧接着在所述速度下平衡转子102之后初始临界速度的分数下的不平衡的rms值等效,则平衡可以被视为已充分执行。也就是说,在不平衡校正子方法963的任何进一步迭代之前。大约相等的rms值可以证明随后的临界速度下转子102的平衡不会干扰
先前的临界速度下转子102的平衡。换言之,在随后的临界速度下平衡转子102并没有摆脱先前在初始临界速度下执行的平衡。进一步地,平衡后转子102的不平衡应落入离心机100操作的可接受容差内。
[0137]
随后,可以通过以下重新平衡转子102:例如检测转子102中的新不平衡并且使一个或多个平衡重体436与相应的平衡孔口432螺纹脱离接合,将去除的平衡重体436重新定位到不同的平衡孔口432,将一个或多个不同的平衡重体436与一个或多个不同的平衡孔口432螺纹接合或用具有不同长度和/或质量的一个或多个平衡重体436替换去除的平衡重体436。使用平衡重体436和平衡孔口432可以消除在重新平衡期间致使过时而重复在转子主体210中钻出孔或塞住此些钻出的孔的需要。
[0138]
图10-18描绘了根据本发明的另一示例性实施例的示例性转子1010(例如,12
×
1.5ml固定角转子)。转子1010包含转子主体1012、加强件1014、平衡环1016、盖1018、驱动轮毂1020和盖螺钉1022。转子1010具有转子1010被配置成当在离心机中使用时围绕其旋转并且转子1010的组件围绕其同心布置的旋转轴线1024。
[0139]
转子主体1012可以由碳纤维复合材料或其它合适的轻质刚性材料制成,并且包含上表面1026、下表面1028、周向侧壁1030和穿过上表面1026和下表面1028的细长镗孔1032。细长镗孔1032可以与旋转轴线1024轴向对齐,并且与转子主体1012的上表面1026中的上部凹部1034和下表面1028中的下部镗孔开口1036相交。如以下更详细描述的,下部镗孔开口1036可以具有键接到驱动轮毂1020以防止转子主体1012相对于驱动轮毂1020旋转的水平横截面形状。
[0140]
转子主体1012的上表面1026可以包含环形表面1038、相对于环形表面1038轴向向下凹陷的中心表面1040和环形凹槽1042。环形凹槽1042可以限定环形表面1038的外周边1044和周向侧壁1030的上部边沿1046。环形凹槽1042可以由重叠以限定肩部1052的上部槽口1048和下部槽口1050限定。中心表面1040可以通过连接表面1054连接到环形表面1038。连接表面1054可以从中心表面1040的外周边轴向向上和径向向外延伸到环形表面1038的内周边。连接表面1054可以被定向为使得其面向轴向向上和径向向内,并且可以包含下部部分1056和上部部分1058。连接表面1054的上部部分1058可以在垂直于连接表面1054的方向上升高到下部部分1056之上。
[0141]
转子主体1012可以进一步包含多个腔体1060(例如,12个腔体),每个腔体从连接表面1054的下部部分1056轴向向下和径向向外延伸并进入转子主体1012。在本发明的一实施例中,所述多个腔体1060可以包括多个周向隔开的管状腔体,每个管状腔体具有被配置成收纳样品容器的开口端。每个腔体1060可以具有垂直于连接表面1054的中心轴线,并且被适当地大小设定和形状设定为收纳样品容器1062。每个腔体1060可以被配置成将其相应样品容器1062固持在合适的定位和朝向以进行离心,例如相对于旋转轴线1024成45度角。
[0142]
每个样品容器1062可以被配置成固持一定量的样品悬浮液(例如,1.5ml)并且包含帽1064,所述帽在被按压到闭合定位时密封样品容器1062。帽1064可以包含凸片1066,所述凸片被配置成便于打开样品容器1062。腔体1060、样品容器1062和帽1064可以被配置成使得当样品容器1062完全插入到其相应腔体1060中时,由连接表面1054的上部部分1058支撑凸片1066。腔体1060的顶部部分还可以包含埋头镗孔1067,所述埋头镗孔被配置成接纳帽1064的圆柱形裙部。有利地,埋头镗孔1067和来自盖1018的底表面的在帽1064的顶表面
上的压力可以提供足够的支撑以防止帽1064在通过离心产生的高g力下的任何变形。由此,这些特征可以防止帽1064与样品容器1062的主体之间的密封受到损害或防止对样品容器1062本身的损坏。
[0143]
加强件1014可以包含一个或多个螺旋式线圈,所述一个或多个螺旋式线圈在转子主体1012的周向侧壁1030周围和上方延伸。加强件1014的内表面1068可以与转子主体1012的环形凹槽1042协同操作以限定平衡环1016在其中定位的通道1070。加强件1014可以使用合适的材料(如环氧树脂涂覆的碳纤维)通过细丝缠绕工艺随后通过压缩模制工艺来形成。例如,在将树脂涂覆的碳纤维层压材料层放置或将一根或多根碳纤维束缠绕到周向侧壁1030的面向外的表面上之后,加强件1014可以被压缩模制到转子主体1012和平衡环1016中。
[0144]
为了防止加强件1014轴向移动,周向侧壁1030可以包含向内锥部,所述向内锥部限定周向侧壁1030中的周向凹部1072。加强件1014的内表面1068可以与周向凹部1072吻合,使得加强件1014抵抗相对于转子主体1012的轴向运动。加强件1014可以被配置成承载施加在转子1010上的大部分离心力。使用细丝缠绕工艺形成用于离心转子的加强件的方法通过于2012年12月4日公布的美国专利第8,323,169号详细描述,所述美国专利的公开内容通过引用以其整体并入本文。
[0145]
平衡环1016可以包含具有矩形横截面的主体1074和凸缘1076。如图15最佳示出的,凸缘1076可以从平衡环1016的主体1074的顶部部分径向向内突出,并且可以被配置成接合转子主体1012的肩部1052。在本发明的一实施例中,平衡环1016可以具有外部直径,所述外部直径等于或略大于加强件1014的内表面1068的直径。在此实施例中,平衡环1016可以通过将平衡环1016冷却到低于环境的温度而操作性地联接到转子1010,使得平衡环1016充分收缩以使其外部直径小于加强件1014的内表面1068的直径。然后可以将平衡环1016放置在通道1070中并允许回暖到环境温度。随着其变暖,平衡环1016可以膨胀,直到其压靠在加强件1014的内表面1068,使得其被牢固地固持在原位。在本发明的一替代性实施例中,平衡环1016可以被加热,使得在将平衡环放置在环形凹槽1042上之前平衡环膨胀并且使平衡环在原位冷却,使得通过收缩配合将平衡环固持到转子主体1012上。在这种情况下,可以在形成加强件1014之前将平衡环1016放置在转子主体1012的环形凹槽1042中。在任一情况下,加强件1014可以将平衡环1016固持在原位。也可以使用粘合剂将平衡环1016操作性地联接到转子主体1012的环形凹槽1042。
[0146]
平衡环1016可以包含多个平衡孔口1078,每个平衡孔口被配置成收纳平衡重体1080。一个或多个平衡重体1080可以选择性地定位在平衡环1016的平衡孔口1078中的一个或多个平衡孔口中以便于平衡转子1010。在本发明的一实施例中,每个平衡重体1080可以包含螺纹柄1082和头部1084。每个平衡孔口1078可以包含被配置成收纳平衡重体1080的螺纹柄1082的螺纹镗孔1086,以及被配置成收纳平衡重体1080的头部1084的接收部1088(例如,埋头锥孔、埋头镗孔等)。接收部1088由此可以允许在将平衡重体1080完全插入到平衡孔口1078中时平衡重体1080的顶部与平衡环1016的顶表面1090齐平或凹陷到所述顶表面下方。
[0147]
平衡环1016可以相对于转子主体1012围绕旋转轴线1024角向定位,使得平衡环1016的平衡孔口1078相对于腔体对称定位。这种对称性可以使最靠近转子主体1012的相应
腔体1060的两个平衡孔口1078中的每个平衡孔口距从旋转轴线1024径向向外延伸并穿过腔体1060的中心轴线的线的距离相等并且位于所述线的相对侧上。平衡环1016的这种角向定位可以为环提供这样的朝向,使得转子主体1012的每个腔体1060在平衡环1016的最靠近腔体1060的两个平衡孔口1078之间角向居中,并且确保转子主体1012的腔体1060与平衡环1016的平衡孔口1078之间的定位对称性。
[0148]
平衡环1016可以由铝或任何其它合适的轻质刚性材料制成。可以选择性地将一个或多个平衡重体1080放置到相应平衡孔口1078中以抵消转子1010中的不平衡。例如,可以添加平衡重体1080以使转子1010的质心与旋转轴线1024对齐(即,实现静态平衡),以使转子的惯性矩的主要轴线与旋转轴线1024对齐(即,动态平衡),或者使得转子1010是静态平衡的和动态平衡的两者。还可以在以上关于图9-9c描述的模态平衡方法期间向平衡环1016添加平衡重体1080。
[0149]
转子1010的盖1018可以包含环形壁部分1092、中心壁部分1093和锥形壁部分1094,并且可以由碳纤维复合物、铝或任何其它合适的刚性低质量材料制成。盖1018的锥形壁部分1094可以将环形壁部分1092的内部边沿1095连接到中心壁部分1093的外部边沿1096。锥形壁部分1094可以以钝角连接到盖1018的中心壁部分1093和环形壁部分1092中的每个壁部分,使得环形壁部分1092从中心壁部分1093轴向偏移并且平行于所述中心壁部分。盖1018的所产生的形状通常可以与转子主体1012的上表面1026的形状吻合。
[0150]
盖1018的环形壁部分1092可以包含具有环形凹槽1100的下表面1098,所述环形凹槽被配置成收纳弹性构件1102,例如o形环。弹性构件1102可以由任何合适的材料(例如,硅酮)制成,并且可以被配置成当盖1018操作性地联接到转子1010时接合平衡环1016的顶表面1090。
[0151]
盖1018的中心壁部分1093可以包含上表面1104、中心镗孔1106和从上表面1104轴向向上突出的提盖手柄1108。中心镗孔1106可以具有与转子主体1012的细长镗孔1032相同的直径,使得镗孔通过驱动轮毂1020而轴向对齐。提盖手柄1108可以包含圆柱形壁1109和凸缘1112,所述圆柱形壁在圆柱形壁的下端连接到盖1018并且具有内表面1110,所述凸缘在圆柱形壁1109的远离盖1018的中心壁部分1093的自由端处从提盖手柄1108的上部部分径向向外突出。提盖手柄1108的凸缘1112可以提供用于抓握转子1010的握把。与缺乏此特征的转子相比,此握把可以改进将转子1010安装在离心机中并且从离心机中移除转子1010的工效学。圆柱形壁1109的内表面1110可以包含接近或邻近上表面1104的颈部1114。颈部1114的直径d1可以小于内表面1110的主要部分的直径d2。内表面1110的主要部分可以通过斜面1116连接到颈部1114。
[0152]
驱动轮毂1020可以包含轴1120、从轴1120的底部部分径向向外突出的凸缘1122和轴向延伸到轴1120的底端中的中心镗孔1124。驱动轮毂1020的中心镗孔1124可以与转子1010的旋转轴线1024轴向对齐,可以包含底表面1130,并且可以被配置成收纳离心机的主轴(未示出)。轴1120的上部部分1126可以被配置成收纳盖螺钉1022。为此,轴1120的上部部分1126可以包含被配置成螺纹接合盖螺钉1022的螺纹外表面1128。
[0153]
轴1120的邻近螺纹外表面1128并且位于螺纹外表面下方的一部分可以具有用于提供螺纹释放的减小的半径(例如,底切)。此螺纹释放可以确保当盖螺钉1022与驱动轮毂1020螺纹接合时凸缘1146的下表面1148不受轴1120的干扰接合盖螺钉1018的中心壁部分
1093的上表面1104。轴1120的上部部分1126可以包含位于其顶部的突出端1129。突出端1129可以具有与螺纹外表面1128的小直径大约相同的直径,并且可以延伸1.5到2.5螺纹宽度的距离超过螺纹外表面1128的螺纹。驱动轮毂1020可以使用计算机数控(cnc)机加工或任何其它合适的工艺由实心金属坯料制造。
[0154]
为了防止驱动轮毂1020相对于主轴旋转,一个或多个驱动销1132可以从中心镗孔1124的底表面1130轴向向下延伸。每个驱动销1132可以被配置成接合离心机的主轴中的相应接收部。每个驱动销1132可以包括插入到相应镗孔1136中的杆1134,所述镗孔轴向延伸到中心镗孔1124的底表面1130中。每个镗孔1136可以从中心镗孔1124的中心轴线径向偏移,使得驱动销1132将响应于主轴向转子1010施加足以在没有驱动销1132的情况下引起主轴与驱动轮毂1020之间的滑动的扭矩而经受剪切力。
[0155]
轮毂1020的驱动部分1138可以从凸缘1122轴向向上并且从轴1120径向向外延伸。轮毂1020的驱动部分1138可以具有与转子主体1012的下部镗孔开口1036的水平横截面形状键接或以其它方式互补的水平横截面形状。将驱动部分1138键接到下部镗孔开口1036可以防止转子主体1012的角向定位在角向加速度下相对于驱动轮毂1020偏移。为此,驱动部分1138的横截面形状可以与下部镗孔开口1036的横截面形状相同,即装配在下部镗孔开口1036内并且具有接合下部镗孔开口1036的侧壁中对应的面部1141的一个或多个面部1139或者以其它方式键接到下部镗孔开口1036的横截面形状的不同形状。
[0156]
例如,驱动部分1138的横截面形状可以是多边形(例如,正方形),具有相比于下部镗孔开口1036的形状数量相同的面部1139或更多的面部1139。举例来说,对于具有正方形形状的水平横截面的下部镗孔开口1036,驱动部分1138可以具有正方形形状、八边形形状或具有与下部镗孔开口1036的面部1141互补的一个或多个面部1139的其它横截面形状。下部镗孔开口1036还可以包含一个或多个轴向对齐的通道1143,所述通道定位在面部1141的顶点将以其它方式促进将驱动轮毂1020的驱动部分1138插入到下部镗孔开口1036中的地方。
[0157]
盖螺钉1022可以由任何合适的材料(例如铝)制成,并且包括具有外表面1140、上部镗孔1142、下部镗孔1144和从圆柱形主体的下端径向向外突出的凸缘1146的圆柱形主体。凸缘1146的外部直径可以与颈部1114的直径d1相同或略小于所述直径。当凸缘1146插入到提盖手柄1108并且盖螺钉1022旋钮到驱动轮毂1020上时,斜面1116可以将凸缘1146引导到颈部1114中。颈部1114和斜面1116可以由此与凸缘1146协同工作以将盖螺钉1022与盖1018和驱动轮毂1020同心定位,由此在盖螺钉1022与驱动轮毂1020接合期间将盖1018与转子1010的旋转轴线1024对齐。盖1018与转子1010的旋转轴线1024之间的最终对齐可以通过驱动轮毂1020的轴1120和盖1018的中心镗孔1106的接合来限定。
[0158]
凸缘1146可以包含具有环形凹槽1150的下表面1148,所述环形凹槽被配置成收纳弹性构件1152。弹性构件1152可以是o形环或由如硅树脂等合适材料制成的其它类型的衬垫。弹性构件1152可以响应于抵靠驱动轮毂1020收紧盖螺钉1022而压靠在盖1018的中心壁部分1093的上表面1104。弹性构件1152可以由此推动盖1018与转子1010可操作地接合。
[0159]
盖螺钉1022可以进一步包含位于上部镗孔1142的相对侧上的一对或多对径向对齐的孔1156。径向对齐的孔1156可以被配置成收纳杆或用于向盖螺钉1022施加扭矩的其它工具。径向对齐的孔1156可以由此促进将盖螺钉1022收紧到驱动轮毂1020,并且从驱动轮
毂1020松开盖螺钉1022。
[0160]
盖螺钉1022的下部镗孔1144可以包含螺纹内表面1158,所述螺纹内表面被配置成螺纹接合驱动轮毂1020的螺纹外表面1128。通过提供轴1120的螺纹外表面1128与下部镗孔1144的螺纹内表面1158之间的接合的干净开始,轴1120的突出端1129可以促进驱动轮毂1020与盖螺钉1022之间的这种螺纹接合。将盖螺钉1022与驱动轮毂1020螺纹接合可以抵靠转子主体1012的上表面1026的至少一部分推动盖1018。盖螺钉1022还可以抵靠样品容器1062的帽1064推动盖1018,由此维持帽1064完全就座在样品容器1062上。以此方式,盖1018还可以通过向每个帽1064的表面施加标称力将样品容器1062固持在样品容器的相应腔体1060内的完全就座定位中。
[0161]
包含平衡环的本发明的实施例可以使用模态平衡方法945以与上面关于图9-9d所描述的类似方式来平衡。也就是说,方法945可以通过在转子1010以多个旋转速度中的每个旋转速度旋转时向转子1010施加外力来确定转子1010的一个或多个临界模态。方法945可以测量和记录每个旋转速度下的振动响应。基于此数据,方法945可以确定在每个旋转速度下振动的严重程度。方法945然后可以将振动最严重的旋转速度标识为临界速度。
[0162]
一旦已经标识出临界速度,方法945就可以在离心机100中以初始测试速度旋转转子1010,所述初始测试速度是临界速度之一的分数,例如,最低临界速度。方法945可以测量和记录在转子1010以初始测试速度旋转时所经历的转子1010的不平衡,例如作为在离心机100的组件,例如,马达轴承,处检测到的振动的功率谱密度的rms值。
[0163]
然后可以在平衡环1016上的参考位置处将已知质量的试验重体安装在平衡孔口1078中,所述参考位置可以是平衡环1016的平衡孔口1078中的平衡孔口的位置,条件是使用同一平衡孔口1078作为平衡方法的其余部分的参考孔径。为了促进重体在平衡环1016中的一致放置,转子主体1014和平衡环1016中的一者或两者可以包含接近平衡孔口1078之一的参考标记。一个或多个参考标记还可以包含在盖1018和转子主体1014上,以促进在使用转子1010期间将盖1018安装在相对于转子主体1014的相同定位中。
[0164]
平衡方法945然后可以以初始测试速度旋转转子1010,并且测量和记录在试验重体就位的情况下转子1010的不平衡,例如,通过确定和记录所测得的振动响应的功率谱的rms值。然后可以将试验重体移动到另一个平衡孔口1078,并且如上所述测量和记录所产生的不平衡。可以重复移动试验重体和测量转子不平衡的过程,直到已经记录了足以确定校正质量应该安装在平衡环1016中的什么地方以及校正质量应该有多大以抵消转子1010的固有不平衡的不平衡测量结果。然后可以将一个或多个平衡重体1080安装在平衡环1016的相应平衡孔口1078中,这,例如,使用以上关于向盖212添加平衡重体436描述的方程组提供了接近或等效于校正质量的平衡质量。
[0165]
对一个或多个额外临界速度可以重复以上所述的在平衡环1016的平衡孔口1078中安装试验重体、以测试速度旋转转子1010、测量和记录不平衡以及在平衡环1016中安装平衡重体1080以平衡转子1010的方法,以达到足够的平衡水平。为了确定转子1010是否已经充分平衡,然后可以使转子1010以目标速度旋转,测量和记录不平衡,并且将不平衡与记录的某个其它旋转速度(例如,初始测试速度)下的不平衡进行比较。
[0166]
实验结果
[0167]
图19描绘了包含作为旋转速度和激励频率的函数的实验测得的转子的振动响应
的三维图1160(其有时被称为瀑布图)的图表。使用sorval mx plus微型超速离心机以根据本发明实施例旋转包含平衡环的转子生成了振动数据。sorval mx plus微型超速离心机可从美国马萨诸塞州沃尔瑟姆赛默飞世尔科技公司(thermo fisher scientific of waltham,massachusetts,united states)获得。在测量通过图1160描绘的振动数据之前,通过选择性地向平衡环的平衡孔口添加平衡重体,对转子的5,000rpm、37,000rpm和55,000rpm的临界速度进行了模态平衡。
[0168]
图1160通常被称为坎贝尔图,并且包含与转子的旋转速度相对应的一个水平轴线1162、与由振动传感器检测到的振动的频率相对应的另一个水平轴线1164以及与以分贝(db)为单位的检测到的振动相对于参考水平的振幅相对应的竖直轴线1166。图1160包含多个切片1168,每个切片与转子的某个旋转速度相对应。每个切片1168包含与所述旋转速度下转子的本征频率相对应的峰1170。例如,切片1168a与5,000rpm的旋转速度相对应,并且具有在83hz处出现的峰1170a。其它峰1170包含切片1168b上与37,000rpm的旋转速度的617hz的本征频率相对应的峰1170b,以及切片1168c上与55,000rpm的旋转速度的917hz的本征频率相对应的峰1170c。如可以看到的,经模态平衡的转子的振动响应跨5,000rpm到55,000rpm的整个测试范围表现良好。
[0169]
图20描绘了用于产生以上测试数据的12
×
1.5ml固定角转子1172。转子1172包含具有24个平衡孔口1176的平衡环1174,并且含有12个样品容器1178。在模态平衡方法期间,安装了一个平衡重体1180a以补偿5,000rpm下的不平衡,安装了另一个平衡重体1180b以补偿37,000rpm下的不平衡,并且安装了最终平衡重体1180c以补偿55,000rpm下的不平衡。
[0170]
图21-23描绘了在转子上执行任何平衡之前(图表1182)、在硬轴承上对转子进行平衡之后(图表1183)和在根据本发明的一实施例对转子进行模态平衡之后(图表1184)实验测得的转子的振动响应的图表1182-1184。通过使用sorval wx 系列微型超速离心机以37,000rpm旋转转子生成了振动数据。此离心机也可从赛默飞世尔科技公司获得。使用的转子为包含具有24个平衡孔口的盖的8
×
100ml转子。
[0171]
每个图表1182-1184包含与以秒为单位的时间相对应的水平轴线1186和与以重力当量g为单位的由于振动引起的加速度相对应的竖直轴线1188。每个图表1182-1184包含转子的振动响应的相应图1190-1192。通过图1190描绘的没有进行平衡的情况下振动加速度的rms值(即,未经平衡的转子的振动)为约0.43g,其中峰值略大于0.60g。通过图1191描绘的振动加速度的rms值为约0.20g或略小于未经平衡的转子的rms振动量的一半。相比之下,通过图1192描绘的振动加速度的rms值为约0.06g。因此,经模态平衡的转子的振动加速度仅为经常规平衡的转子的约28%,并且仅为未经平衡的转子的振动加速度的约13%。
[0172]
图24描绘了示出了振动rms水平对旋转速度的图表1193。图表1193包含与以rpm
×
1,000为单位的转子的旋转速度相对应的水平轴线1194,以及与以g为单位的感测到的振动的rms值相对应的竖直轴线1195。图1196展示产生图22中描述的数据的经常规平衡的转子的振动水平,并且图1197展示了产生图23中描绘的数据的经模态平衡的转子的振动水平。下阈值1198说明了离心机的可接受振动容差极限的示例性0.3g阈值,并且上阈值1199说明了离心机可以断开的示例性0.7g不平衡开关触发极限。如可以看到的,经常规平衡的转子的rms振动随着旋转速度增加而攀升。相比之下,经模态平衡的转子的rms振动在所有速度下都低于经常规平衡的转子。在所示的具体实例中,rms振动在15,000rpm与20,000rpm之间
达到最大值,并且之后随着旋转速度增加而下降。然而,不同序列号的同一转子型号在不同速度下可能存在细微变化。因此,图24的图表1193提供了模态平衡对离心机转子的有效性的总体视图,特别是对于由柔性主轴驱动的转子。在任何情况下,显而易见的是相比于经常规平衡的转子,经模态平衡的转子可以以更高的旋转速度并且在更少振动下操作。
[0173]
现在参考图25,上述本发明的实施例或其部分可以使用一个或多个计算机装置或系统,如示例性计算机1200,来实施。计算机1200可以包含处理器1202、存储器1204、输入/输出(i/o)接口1206和人机接口(hmi)1208。计算机1200还可以通过i/o接口1206或网络1212操作性地联接到一个或多个外部资源1210。外部资源可以包含但不限于服务器、数据库、大容量存储装置、外围装置、基于云的网络服务或计算机1200可以使用的任何其它资源。
[0174]
处理器1202可以包含选自以下的一个或多个装置:微处理器、微控制器、数字信号处理器、微型计算机、中央处理单元、现场可编程门阵列、可编程逻辑装置、状态机、逻辑电路、模拟电路、数字电路或基于存储在存储器1204中的操作指令来操纵信号(模拟或数字)的任何其它装置。存储器1204可以包含单个存储器装置或多个存储器装置,所述存储器装置包含但不限于只读存储器(rom)、随机存取存储器(ram)、易失性存储器、非易失性存储器、静态随机存取存储器(sram)、动态随机存取存储器(dram)、闪速存储器、高速缓冲存储器或如硬驱动器、光驱动器、磁带驱动器、易失性或非易失性固态装置等数据存储装置或能够存储数据的任何其它装置。
[0175]
处理器1202可以在驻留在存储器1204中的操作系统1214的控制下操作。操作系统1214可以管理计算机资源,使得体现为一个或多个计算机软件应用程序,如驻留在存储器1204中的应用程序1216,的计算机程序代码可以具有由处理器1202执行的指令。在替代性实施例中,处理器1202可以直接执行应用程序1216,在这种情况下,可以省略操作系统1214。一个或多个数据结构1218也可以驻留在存储器1204中,并且可以被处理器1202、操作系统1214或应用程序1216用来存储或操纵数据。
[0176]
i/o接口1206可以提供将处理器1202操作性地联接到其它装置和系统的机器接口,如外部资源1210或网络1212。应用程序1216由此可以通过经由i/o接口1206通信来与外部资源1210或网络1212协作工作以提供包括本发明的实施例的各种特征、功能、应用程序、方法或模块。应用程序1216还可以具有由一个或多个外部资源1210执行的程序代码,或者另外依赖于由计算机系统1200外部的其它系统或网络组件提供的功能或信号。实际上,考虑到几乎无限的硬件和软件配置是可能的,本领域普通技术人员将理解,本发明的实施例可以包含定位于计算机1200外部、分布在多个计算机或其它外部资源1210中、或由作为网络1212之上的服务,如云计算服务,提供的计算资源(硬件和软件)提供的应用程序。
[0177]
hmi 1208可以操作性地耦接到计算机1200的处理器1202以允许用户直接与计算机1200交互。hmi 1208可以包含视频或字母数字显示器、触摸屏、扬声器以及能够向用户提供数据的任何其它合适的音频和视觉指示器。hmi 1208还可以包含如字母数字键盘、定点装置、小键盘、按钮、控制旋钮、麦克风等能够接受来自用户的命令或输入并且将输入的输入传输到处理器1202的输入装置和控件。
[0178]
数据库1220可以驻留在存储器1204中,并且可以用于收集和组织由在此描述的各种系统和模块使用的数据。数据库1220可以包含数据以及存储和组织数据的数据支持结
构。具体地,数据库1220可以布置有任何数据库组织或结构,包含但不限于关系数据库、分层数据库、网络数据库或其组合。作为指令在处理器1202上执行的计算机软件应用程序形式的数据库管理系统可以用于响应于查询访问存储在数据库1220的记录中的信息或数据,所述查询可以由操作系统1214、其它应用程序1216或一个或多个模块动态确定和执行。
[0179]
通常,为实施本发明的实施例而执行的例程,无论是作为操作系统的一部分还是特定应用程序、组件、程序、对象、模块或指令序列或其子集实施,在此都可以被称为“计算机程序代码”或简单地“程序代码”。程序代码通常包括计算机可读指令,所述计算机可读指令在各个时间驻留在计算机中的各个存储器和存储装置中并且在由计算机中的一个或多个处理器读取和执行时使计算机执行进行体现本发明的实施例的各个方面的操作或元素所需的操作。用于执行本发明的实施例的操作的计算机可读程序指令可以是例如汇编语言、源代码或以一种或多种编程语言的任意组合编写的目标代码。
[0180]
在本发明的特定实施例中可以基于本文所述的各个程序代码在其中实施例的应用程序来标识所述程序代码。然而,应当理解,使用以下任何特定程序命名法仅仅是为了方便,因此本发明不应仅限于通过这种命名法所标识或暗示的任何特定应用程序。此外,考虑到可以将计算机程序组织成例程、过程、方法、模块、对象等的总体上无限数量的方式,以及程序功能可以在驻留在典型计算机(例如,操作系统、库、api、应用程序、小应用程序等)内的各个软件层之间分配的各种方式,应当理解,本发明的实施例不限于在此描述的程序功能的特定组织和分配。
[0181]
本文所述的任何应用程序/模块中体现的程序代码能够作为计算机程序产品以各种不同的形式单独地或共同地分发。具体地,程序代码可以使用其上具有计算机可读程序指令的计算机可读存储介质来分发,以使处理器执行本发明的实施例的各方面。
[0182]
固有地非暂时性的计算机可读存储介质可以包含在任何方法或技术中实施以用于存储数据,如计算机可读指令、数据结构、程序模块或其它数据的易失性和非易失性以及可移除和不可移除有形介质。计算机可读存储介质可以进一步包含ram、rom、可擦可编程只读存储器(eprom)、电可擦可编程只读存储器(eeprom)、闪存或其它固态存储技术、便携式光盘只读存储器(cd-rom)或其它光存储区、磁带盒、磁带、磁盘存储区或其它磁性存储装置,或可以用于存储数据并且可以由计算机读取的任何其它介质。计算机可读存储介质本身不应被解释为瞬态信号(例如,无线电波或其它传播的电磁波、通过如波导等传输介质传播的电磁波或通过电线传输的电信号)。计算机可读程序指令可以从计算机可读存储介质下载到计算机、另一种类型的可编程数据处理设备或另一装置,或者通过网络下载到外部计算机或外部存储装置。
[0183]
存储在计算机可读介质中的计算机可读程序指令可以用于引导计算机、其它类型的可编程数据处理设备或其它装置以特定方式运行,使得存储在计算机可读介质中的指令产生制品,包含实施流程图、顺序图或框图中指定的功能、动作或操作的指令。计算机程序指令可以提供给通用计算机、专用计算机或其它可编程数据处理设备的一个或多个处理器以产生机器,使得通过一个或多个处理器执行的指令引起为实施规范文本、流程图、顺序图或框图中指定的功能、动作或操作而执行的一系列计算。
[0184]
图中描绘的流程图和框图说明了根据本发明的各个实施例的系统、方法或计算机程序产品的可能实施方案的架构、功能或操作。在此方面,流程图或框图中的每个框可以表
示模块、片段或指令部分,其包括用于实施一个或多个指定的逻辑功能的一条或多条可执行指令。
[0185]
在某些替代性实施例中,流程图、顺序图或框图中指定的功能、动作或操作可以与本发明的实施例一致重新排序、串行处理或并行处理。此外,流程图、顺序图或框图中的任一个可以包含相比于与本发明的实施例一致展示的那些更多或更少的框。还应理解,框图或流程图的每个框或者框图或流程图中的框的任何组合可以由被配置成执行指定功能或动作的专用基于硬件的系统实施,或通过专用硬件和计算机指令的组合执行。
[0186]
本文所使用的术语仅用于描述特定实施例的目的,而不旨在限制本发明的实施例。如本文所用,除非上下文另有明确说明,单数形式“一个”(“a”、“an”)和所述(“the”)旨在包含单数和复数形式,并且术语“和”和“或”各自旨在包含替代和连接组合。将进一步理解的是,当在本说明书中使用时,术语“包括(comprises)”或“包括(comprising)”指定所陈述的特征、整数、动作、步骤、操作、元件和/或组件的存在,但不排除一个或多个其它特征、整数、动作、步骤、操作、元件、组件和/或以上的组的存在或添加。此外,就详细描述和权利要求中使用术语“包含(includes)”、“具有(having,has,with)”、“包含(comprised of)”或其变化形式的程度而言,此类术语旨在以类似于术语“包括(comprising)”的方式是包含性的。
[0187]
虽然已通过描述示例性实施例说明本发明且虽然已相当详细地描述了这些实施例,但本技术人并不意图将所附权利要求的范围约束或以任何方式限制为此类细节。另外的优点和修改是本领域技术人员容易了解的。因此,本发明在其较宽方面并不限于所示出且描述的具体细节、代表性设备和方法以及说明性示例。因此,可在不脱离申请人的一般发明概念的精神或范围的情况下,可以从这些细节中做出偏离。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。