1.本发明涉及物流领域,尤其涉及一种分拣或拣选服装的系统。
背景技术:
2.物流(logistics)是为了满足客户需要而对商品、服务消费以及相关信息从产地到消费地的高效、低成本流动和储存进行的规划、实施与控制的过程。物流由商品的运输、配送、仓储、包装、搬运装卸、流通加工、以及相关的物流信息等环节构成。物流活动的具体内容包括以下几个方面:用户服务、需求预测、定单处理、配送、存货控制、运输、仓库管理、工厂和仓库的布局与选址、搬运装卸、采购、包装、情报信息。
3.现在电商的快速崛起和行业的需求,对于仓储物流配送这一重要环节的需求和要求也在不断提高,不仅仅只是简单的发货,更重要的是做好仓储库存物流配送的环节,使电商整体流程形成良性发展,从而促进在物流全过程中以最小的综合成本来满足顾客的需求。
4.为合理调度仓储的运作,对客户需求做出快速动态反应,仓库配备先进的物流软件和硬件设施,包括立体货架、自动存取机器人、自动分拣系统、条码管理系统及流通加工设备等,尽可能实现入库与出库的自动化运作。
5.服装业的电商发展迅速,物流作业负担重,如何快速准确处理订单,一直是业界的一大难题。
技术实现要素:
6.本发明的目的在于提供一种分拣或拣选服装的系统,其采用两端开放的多组轨道,可供采用路面轮式行走机构的机器人在轨道间行走,机器人可从每组轨道相对的供电导轨取电来工作,并且可以同时给储能模块充电,实现边工作边给储能模块充电,且在未能从供电导轨取电时,通过储能模块给ups模块供电实现机器人的不间断供电,从而机器人可以脱离供电导轨行走,有利于不同工作区域的调度,且通过供电导轨供电可以保障机器人连续长时间工作。
7.本发明的另一目的在于提供一种分拣或拣选服装的系统,其采用两端开放的多组轨道,可供采用路面轮式行走机构的机器人在轨道间行走,行走灵活,可以在更大的场地范围内调度使用机器人,且可根据工作量需要进行调度安排机器人,合理利用机器人进入工作的数量,节约能源。
8.本发明的又一目的在于提供一种分拣或拣选服装的系统,其采用两端开放的多组轨道,可供采用路面轮式行走机构的机器人在轨道间行走,并且机器人的行走机构转弯半径小,可以减少轨道两端的开放空间,充分利用场地空间,而且能有效避免转弯产生的侧倾,行走快速且稳定,工作效率高。
9.本发明的又一目的在于提供一种分拣或拣选服装的系统,其采用两端开放的多组轨道,可供采用路面轮式行走机构的机器人在轨道间行走,并且能对轨道内行走的机器人
进行限位,提升机器人的行走稳定性,利于机器人的快速行走,提高工作效率。
10.本发明的又一目的在于提供一种分拣或拣选服装的系统,其设有激光高度传感器与反光测量传感器,可以保障抓取机构的稳定有效抓取商品,避免碰撞或无效操作,同时在商品取空后及时反馈,提升物流效率。
11.本发明的又一目的在于提供一种分拣或拣选服装的系统,其在旋转平台上设置第一接近开关、第二接近开关与第三接近开关,通过第一接近开关控制在待机时保持摇臂组件于初始位置,可以保障重心在中心,有利于行走稳定,通过第二与第三接近开关控制旋转平台转动摇臂组件的两个极限摆动位,防止机器人的重心偏离过多而造成机器人行走时不稳。
12.本发明的又一目的在于提供一种分拣或拣选服装的系统,其将吸盘连接在活塞上,抽真空吸取商品时,也将吸盘吸进气缸缸体,使得商品可以抵靠在气缸下盖上,从而防止因商品上升过程中摇晃引发破真空导致商品脱落的问题,保障系统高效稳定工作。
13.为实现上述目的,本发明提供一种分拣或拣选服装的系统,包括数组开放式的轨道及数个机器人,所述机器人能根据需要进入不同组轨道进行相应作业;所述每组轨道形成两端向外敞开的喇叭口以利于机器人进入轨道,所述每组轨道包括两条相对设置的供电导轨;所述机器人包括底座组件、安装于底座组件底部的行走机构、安装于底座组件上的电箱组件、穿过电箱组件安装于底座组件上的立柱组件、安装于立柱组件上的摇臂组件、安装于摇臂组件下侧的抓取机构;所述底座组件包括底座箱体、安装于底座箱体的轨道取电模块、安装于底座箱体内的ups模块与储能模块,所述轨道取电模块用于在与供电导轨电性接触时供电给ups模块,ups模块将轨道取电模块供应的电输出作为工作电源且同时供给储能模块充电,当轨道取电模块未能供电给ups模块,所述ups模块立即从储能模块取电并输出作为工作电源。
14.每条供电导轨包括导轨本体、安装在导轨本体内侧上的滑触线、两个分别安装在导轨本体内侧两端的防撞板,所述导轨本体包括平直的导轨主体及位于导轨主体两端且斜向外侧延伸的导轨导向部,所述防撞板分别安装在导轨导向部上,所述滑触线安装在导轨主体上;
15.所述供电导轨还包括两个安装在导轨本体上且分别位于滑触线与两个防撞板之间的电刷导向板、两个安装在导轨本体上且分别位于滑触线与两个电刷导向板之间的衔接件、安装在导轨本体上且接触夹抱滑触线的供电夹、数个安装在导轨本体内侧上且分别位于导轨本体与滑触线之间的组装板、及数个安装于导轨本体外侧且用于固定导轨本体于场地上的固定座,所述电刷导向板分别安装在导轨主体的两端。
16.所述滑触线为两条,所述供电夹为两对,分别夹抱在滑触线的两端;所述导轨本体内侧形成两端与一侧开口的半封闭的容纳空间,所述滑触线、防撞板、电刷导向板、衔接件、供电夹、组装板均安装在所述容纳空间内;所述滑触线的横截面呈c形,相应具有c形的电刷滑行槽,所述电刷导向板设有电刷导向槽,且该电刷导向槽靠近衔接件一端呈收小的形状,所述衔接件设有电刷缓冲槽,且该电刷缓冲槽靠近电刷导向板一端呈喇叭口形,以缓解导电刷从电刷导向板进入滑触线的冲击,所述防撞板设有电刷引导槽,导电刷依次通过电刷引导槽、电刷导向槽、电刷缓冲槽而进入电刷滑行槽,并与滑触线保持接触,从而实现从滑触线取电。
17.所述机器人还包括放置于底座组件上的货筐;
18.所述立柱组件包括立柱、安装于立柱顶端的旋转平台、安装于旋转平台上且能驱动旋转平台的旋转电机;
19.所述摇臂组件包括摇臂壳体、安装于摇臂壳体内的移行机构与升降机构、安装于摇臂壳体上能驱动移行机构的移行电机、安装于摇臂壳体上能驱动升降机构的升降电机,所述摇臂壳体靠近一端底部安装于立柱组件的旋转平台上,所述移行机构能带动升降机构移动,所述升降机构与所述抓取机构连接以驱动抓取机构升降,移行机构带动升降机构移动时,升降机构带动抓取机构移动,旋转平台带动所述摇臂壳体绕立柱组件转动时,摇臂壳体带动升降机构绕立柱组件转动,升降机构带动抓取机构绕立柱组件转动;
20.所述升降机构正对抓取机构的位置上设有传感器安装座,所述传感器安装座上安装有激光高度传感器与反光测量传感器,所述激光高度传感器与反光测量传感器能垂直往下照射到货筐;
21.所述货筐的底面上设有反光板;
22.所述激光高度传感器用于测量其与货筐内商品的距离,以供算出升降机构应降下抓取机构的距离以保障抓取机构稳定抓取商品,所述反光测量传感器用于探测货筐底面上反光板的反射光,一旦探测到反光板的反射光,则判定对应货筐底面上的商品已经取空。
23.所述反光板为反光纸或反光镜,所述货筐内设有分格挡板以将货筐分隔成数个存货区,反光板对应存货区设在货筐的底面上,商品存放于存货区里,所述商品为服装,且包装成薄件物体;所述激光高度传感器与反光测量传感器在水平方向上向外突出抓取机构的外周面以垂直往下照射到货筐,所述传感器安装座上还安装有升降原点接近开关,用于限制升降机构继续往上拉升抓取机构。
24.所述立柱组件还包括安装于旋转平台上的第一接近开关、第二接近开关与第三接近开关,通过第一至第三接近开关,分别控制在待机时保持摇臂组件于初始位置、及旋转平台转动摇臂组件的两个极限摆动位;
25.所述移行电机与升降电机均位于立柱组件远离抓取机构一侧,移行电机与升降电机分别位于相对立柱组件两侧;所述抓取机构包括气缸缸体、固定在气缸缸体上端的气缸上盖、装在气缸缸体内的活塞、安装在气缸缸体内的弹簧、安装在活塞上端的密封圈、安装在气缸缸体下端的气缸下盖、安装在活塞下端的吸盘、安装在活塞上且伸出气缸缸体的气管接头、连接气管接头且安装在底座组件上的真空泵;所述气缸缸体侧面设有条形槽,所述气管接头穿过条形槽伸出气缸缸体,且受活塞带动能沿条形槽上下移动,气缸下盖设有圆孔以供吸盘通过,活塞沿其轴线设有台阶孔,弹簧一端抵靠在气缸上盖,另一端伸入台阶孔并抵靠在台阶孔的台阶壁上,所述气缸缸体、活塞、吸盘、气管接头、真空泵连通形成一个气密空间,抓取机构进行抓取商品时,吸盘贴紧商品,通过真空泵抽真空,吸盘吸取商品,同时外部的大气压力推动活塞压缩弹簧向上移动,带动吸盘向上移动,直至吸盘完全缩进气缸缸体内,商品因吸盘缩进气缸缸体内而抵靠在气缸下盖上,防止升降抓取机构过程中产生晃动而导致吸盘破真空。
26.所述行走机构包括动力组件与转角组件,所述动力组件安装于底座箱体一端的底部,所述转角组件相对动力组件安装于底座箱体的另一端底部;
27.所述动力组件包括相对设置的两动力轮,分别位于底座箱体一端的底部两侧,所
述转角组件包括转向轮,位于底座箱体另一端的底部中间,通过控制两动力轮的转速差,且同时控制转向轮的转向角度,在两动力轮的转速差与转向轮的转向角度共同配合下,来实现行走机构带动底座组件在行进中的转向,当两动力轮的转速差为0,且转向轮的转向角度为0,行走机构带动底座组件直线行进。
28.所述动力组件还包括安装座板及分别安装于安装座板一侧两端的两动力轮支架,所述两动力轮分别安装于两动力轮支架,所述动力轮包括动力电机及安装于动力电机的转轴上的行走轮,所述两动力轮支架相对设置,两行走轮分别位于两动力轮支架外侧,且分别位于底座箱体的两侧;所述转角组件还包括安装支板、安装于安装支板上的转角电机、安装于转角电机的转轴上的驱动齿轮、可转动安装于安装支板上的转向轴、安装于转向轴一端上的转向齿轮、安装于转向齿轮上远离安装支板一侧的转向轮支架,所述转向轮安装于转向轮支架上,所述驱动齿轮与转向齿轮啮合。
29.所述轨道取电模块安装于底座箱体的靠近动力组件的底部,所述轨道取电模块包括安装基板、安装于安装基板上的伸缩电机、安装在伸缩电机的转轴上的旋转板、两个一端分别连接在旋转板上的连杆、两个分别连接连杆另一端的伸缩板、两组分别安装在伸缩板一侧两端的滑动板、两根穿过滑动板的滑动轴、及两个分别安装在两组滑动板外侧的导电刷,通过伸缩电机转动带动旋转板转动,进而带动连杆产生摆动,连杆的摆动对伸缩板产生推拉作用,从而带动滑动板相对滑动轴产生来回移动,进而带动导电刷产生伸缩运动,所述安装基板与滑动轴分别安装在底座箱体上,所述滑动板与滑动轴之间安装有轴承,所述导电刷具有两个接触刷头以与供电导轨接触。
30.所述底座组件还包括分别设于底座箱体两端面的导向轮与避障器。
31.本发明的有益效果:本发明分拣或拣选服装的系统采用两端开放的多组轨道,可供采用路面轮式行走机构的机器人在轨道间行走,机器人可从每组轨道相对的供电导轨取电来工作,并且可以同时给储能模块充电,实现边工作边给储能模块充电,减少在工作之外安排给储能模块充电的不便,例如需要做额外的充电操作,甚至因充电而影响工作时长,在未能从供电导轨取电时,例如离开供电导轨或停电时,通过储能模块给ups模块供电实现机器人的不间断供电,从而机器人可以脱离供电导轨行走,有利于不同工作区域的调度,且通过供电导轨供电可以保障机器人连续长时间工作。本发明分拣或拣选服装的系统采用两端开放的多组轨道,可供采用路面轮式行走机构的机器人在轨道间行走,行走灵活,可以在更大的场地范围内调度使用机器人,可以降低配备机器人的数量,降低物流系统成本,且可根据工作量需要进行调度安排机器人,合理利用机器人进入工作的数量,节约能源。在机器人检修或出现故障时,可以随时以其它机器人来替补,不需要配备备用机器人或停工。本发明分拣或拣选服装的系统采用两端开放的多组轨道,可供采用路面轮式行走机构的机器人在轨道间行走,并且机器人的行走机构转弯半径小,可以减少轨道两端的开放空间,充分利用场地空间,而且能有效避免转弯产生的侧倾,行走快速且稳定,工作效率高。本发明分拣或拣选服装的系统采用两端开放的多组轨道,可供采用路面轮式行走机构的机器人在轨道间行走,并且能对轨道内行走的机器人进行限位,提升机器人的行走稳定性,利于机器人的快速行走,提高工作效率,且通过导向轮与轨道的接触实现行走限位,有利于缓解机器人与轨道之间的撞碰与摩擦,延长轨道使用寿命。本发明分拣或拣选服装的系统设有激光高度传感器与反光测量传感器,可以保障抓取机构的稳定有效抓取商品,避免碰撞或无效操作,同
时在商品取空后及时反馈,提升物流效率。本发明分拣或拣选服装的系统在旋转平台上设置第一接近开关、第二接近开关与第三接近开关,通过第一接近开关控制在待机时保持摇臂组件于初始位置,可以保障重心在中心,有利于行走稳定,通过第二与第三接近开关控制旋转平台转动摇臂组件的两个极限摆动位,防止机器人的重心偏离过多而造成机器人行走时不稳。本发明分拣或拣选服装的系统将吸盘连接在活塞上,抽真空吸取商品时,也将吸盘吸进气缸缸体,使得商品可以抵靠在气缸下盖上,从而防止因商品上升过程中摇晃引发破真空导致商品脱落的问题,保障系统高效稳定工作。
附图说明
32.为了能更进一步了解本发明的特征以及技术内容,请参阅以下有关本发明的详细说明与附图,然而附图仅提供参考与说明用,并非用来对本发明加以限制。
33.附图中,
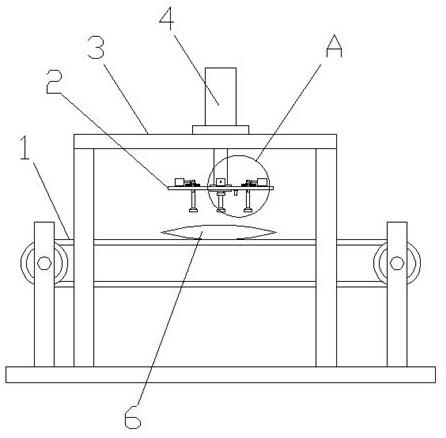
34.图1为本发明分拣或拣选服装的系统的示意图;
35.图2为本发明分拣或拣选服装的系统的供电导轨的立体图;
36.图3为本发明分拣或拣选服装的系统的供电导轨的立体分解图;
37.图4a为本发明分拣或拣选服装的系统的供电导轨的局部立体图;
38.图4b为本发明分拣或拣选服装的系统的供电导轨的局部立体图,去除供电夹与衔接件上的一段滑触线;
39.图5为本发明分拣或拣选服装的系统的机器人的立体图;
40.图6为本发明分拣或拣选服装的系统的机器人的立体分解图;
41.图7为本发明分拣或拣选服装的系统的机器人的立柱组件的立体图;
42.图8为本发明分拣或拣选服装的系统的机器人的立柱组件、摇臂组件的示意图;
43.图9为本发明分拣或拣选服装的系统的机器人的另一角度的立体图;
44.图10为本发明分拣或拣选服装的系统的机器人的摇臂组件与抓取机构的立体分解图,示出抓取机构下降的状态;
45.图11为本发明分拣或拣选服装的系统的机器人的货筐的立体图;
46.图12为本发明分拣或拣选服装的系统的机器人的升降机构、抓取机构与货筐的平面示意图;
47.图13为本发明分拣或拣选服装的系统的机器人的抓取机构的立体图;
48.图14为本发明分拣或拣选服装的系统的机器人的抓取机构的立体分解图;
49.图15为本发明分拣或拣选服装的系统的机器人的部分立体图;
50.图16为本发明分拣或拣选服装的系统的机器人的另一角度的立体分解图;
51.图17为本发明分拣或拣选服装的系统的机器人的轨道取电模块、ups模块、储能模块的电路关系示意图;
52.图18为本发明分拣或拣选服装的系统的机器人的底座组件与行走机构的平面示意图;
53.图19为本发明分拣或拣选服装的系统的机器人的底座组件与行走机构的另一角度的平面示意图;
54.图20为本发明分拣或拣选服装的系统的机器人的动力组件的立体图;
55.图21为本发明分拣或拣选服装的系统的机器人的动力组件的立体分解图;
56.图22为本发明分拣或拣选服装的系统的机器人的转角组件的立体图;
57.图23为本发明分拣或拣选服装的系统的机器人的转角组件的立体分解图;
58.图24为本发明分拣或拣选服装的系统的机器人的轨道取电模块的立体图;
59.图25为本发明分拣或拣选服装的系统的机器人的轨道取电模块的立体分解图;
60.图26为本发明分拣或拣选服装的系统的机器人的轨道取电模块的立体图以示出其处于伸出状态;
61.图27为本发明分拣或拣选服装的系统的机器人的轨道取电模块的立体图以示出其处于收缩状态。
具体实施方式
62.为更进一步阐述本发明所采取的技术手段及其效果,以下结合本发明的优选实施例及其附图进行详细描述。
63.请参阅图1,本发明提供一种分拣或拣选服装的系统,其包括数组开放式的轨道1及数个机器人2,机器人2可以根据需要进入不同组轨道1进行相应作业。所述每组轨道1包括两条相对设置的供电导轨10。
64.请参阅图2-4b,所述供电导轨10包括导轨本体100、两条安装在导轨本体100内侧上的滑触线102、两个分别安装在导轨本体100内侧两端的防撞板103、两个安装在导轨本体100上且分别位于滑触线102与两个防撞板103之间的电刷导向板105、两个安装在导轨本体100上且分别位于滑触线102与两个电刷导向板105之间的衔接件106、两对安装在导轨本体100上且分别接触夹抱两条滑触线102两端的供电夹107、数个安装在导轨本体100内侧上且分别位于导轨本体100与滑触线102之间的组装板108、及数个安装于导轨本体100外侧且用于固定导轨本体100于场地上的固定座109。
65.所述导轨本体100包括平直的导轨主体1000及位于导轨主体1000两端且斜向外侧延伸的导轨导向部1002。所述防撞板103分别安装在导轨导向部1002上。所述滑触线102安装在导轨主体1000上。所述电刷导向板105分别安装在导轨主体1000的两端。所述导轨本体100内侧形成两端与一侧开口的半封闭的容纳空间1005,所述滑触线102、防撞板103、电刷导向板105、衔接件106、供电夹107、组装板108均安装在所述容纳空间内,对其形成一定的防碰撞保护及防尘保护。
66.所述滑触线102的横截面呈c形,相应具有c形的电刷滑行槽1020,所述电刷导向板105设有电刷导向槽1050,且该电刷导向槽1050靠近衔接件106一端呈收小的形状,所述衔接件106设有电刷缓冲槽1060,且该电刷缓冲槽1060靠近电刷导向板一端呈喇叭口形,以缓解导电刷317(见图15)从电刷导向板105进入滑触线102的冲击。所述防撞板103设有电刷引导槽1030。导电刷317依次通过电刷引导槽1030、电刷导向槽1050、电刷缓冲槽1060而进入电刷滑行槽1020,并与滑触线102保持接触,从而实现从滑触线102取电。
67.所述每组轨道1形成两端向外敞开的喇叭口,方便机器人2进入轨道1以及方便机器人2驶离轨道1进行转向。所述机器人2的数量可以根据场地大小及预计工作量进行选配。请参阅图5-8,所述机器人2包括底座组件3、安装于底座组件3底部的行走机构4、安装于底座组件3上的电箱组件5、穿过电箱组件5安装于底座组件3上的立柱组件6、安装于立柱组件
6上的摇臂组件7、安装于摇臂组件7下侧的抓取机构8。
68.请参阅图5-6,所述机器人包括底座组件3、安装于底座组件3底部的行走机构4、安装于底座组件3上的电箱组件5、穿过电箱组件5安装于底座组件3上的立柱组件6、安装于立柱组件6上的摇臂组件7、安装于摇臂组件7下侧的抓取机构8、及放置于底座组件3上的货筐9。
69.请参阅图7-9,所述立柱组件6包括立柱60、安装于立柱顶端的旋转平台62、安装于旋转平台62上且能驱动旋转平台62的旋转电机63、安装于旋转平台62上的第一接近开关65、第二接近开关66与第三接近开关67。所述摇臂组件7安装在旋转平台62上,通过第一至第三接近开关65、66、67,可以分别控制在待机时保持摇臂组件7于初始位置、及旋转平台62转动摇臂组件7的两个极限摆动位。通过控制摇臂组件7不超过极限摆动位,防止机器人的重心偏离过多而造成机器人行走时不稳。而让摇臂组件7待机位于初始位置,可以保障重心在中心,有利于行走稳定。
70.所述摇臂组件7包括摇臂壳体70、安装于摇臂壳体70内的移行机构72与升降机构73、安装于摇臂壳体70上能驱动移行机构72的移行电机75、安装于摇臂壳体70上能驱动升降机构73的升降电机76。所述摇臂壳体70靠近一端底部安装于立柱组件6的旋转平台62上。所述移行机构72能带动升降机构73移动。所述升降机构73与所述抓取机构8连接。升降机构73可以驱动抓取机构8升降。移行机构72带动升降机构73移动时,升降机构73带动抓取机构8移动。通过旋转电机63驱动旋转平台62带动所述摇臂壳体70绕立柱组件6转动,摇臂壳体70绕立柱组件6转动带动升降机构73绕立柱组件6转动,升降机构73绕立柱组件6转动带动抓取机构8绕立柱组件6转动。因此,所述抓取机构8可以实现于水平方向内转动与移动及于垂直方向上移动,从而可以相应调整其位置以抓取想要的商品200。因此,本发明适用于伸入货筐的垂直式拣选。
71.所述移行电机75与升降电机76均位于立柱组件6远离抓取机构8一侧,以促进摇臂组件相对立柱组件6两端的重力矩平衡,且移行电机75与升降电机76分别位于相对立柱组件6两侧,以促进摇臂组件相对立柱组件6两侧的重力矩平衡。从而利于机器人稳定行走,尤其防止转弯时发生侧倾。
72.请参阅图10与图12,所述升降机构73正对抓取机构8的位置上设有传感器安装座78,所述传感器安装座78上安装有激光高度传感器781、反光测量传感器783、及升降原点接近开关785。所述升降原点接近开关785用于限制升降机构73继续往上拉升抓取机构8,避免抓取机构8与升降机构73发生碰撞。升降机构73具有链条735,通过链条735上行与下行来实现对抓取机构8的升降。
73.请参阅图11-12,所述货筐9内设有分格挡板91将货筐分隔成数个存货区93,对应存货区93在货筐的底面上设有反光板95。商品200存放于存货区93里,所述商品为服装,且包装成薄件物体。所述激光高度传感器781与反光测量传感器783在水平方向上向外突出抓取机构8的外周面,可以垂直往下照射到货筐9。所述激光高度传感器781用于测量其与货筐9内商品200的距离,以供算出升降机构73应降下抓取机构8的距离以保障抓取机构8稳定抓取商品200。反光测量传感器783用于探测货筐9底面上反光板95的反射光,一旦探测到反光板95的反射光,则可判定该存货区商品200已经取空,避免抓取机构8再来取商品200,并可及时通知补货。所述反光板95可以是反光纸或反光镜,只要能够反射光线的均可。
74.请参阅图12-15,所述抓取机构8包括气缸缸体81、固定在气缸缸体81上端的气缸上盖82、装在气缸缸体81内的活塞83、安装在气缸缸体81内的弹簧84、安装在活塞83上端的密封圈85、安装在气缸缸体81下端的气缸下盖86、安装在活塞83下端的吸盘87、安装在活塞83上且伸出气缸缸体81的气管接头88、连接气管接头88且安装在底座组件3上的真空泵89。所述气缸缸体81侧面设有条形槽812,所述气管接头88穿过条形槽812伸出气缸缸体81,且受活塞83带动能沿条形槽812上下移动。气缸下盖86设有圆孔862以供吸盘87通过,且不影响气缸下盖86将活塞83限制在气缸缸体81内。活塞83沿其轴线设有台阶孔832,弹簧84一端抵靠在气缸上盖82,另一端伸入台阶孔832并抵靠在台阶孔832的台阶壁上。所述气缸缸体81、活塞83、吸盘87、气管接头88、真空泵89连通形成一个气密空间。抓取机构8进行抓取时,吸盘87贴紧商品200,通过真空泵89抽真空,吸盘87吸取商品200,且同时外部的大气压力推动活塞83压缩弹簧84向上移动,带动吸盘87向上移动,直至吸盘87完全缩进气缸缸体81内,此时商品200将因吸盘87缩进气缸缸体81内而抵靠在气缸下盖86上,防止升降抓取机构8过程中产生晃动而导致吸盘87破真空,出现抓取商品200失效的不稳定状况。
75.请参阅图15-17,所述底座组件3包括底座箱体30、安装于底座箱体30的轨道取电模块31、安装于底座箱体30内的ups模块32与储能模块33。所述电箱组件5安装于底座箱体30的顶面一侧。
76.所述轨道取电模块31用于在与供电导轨10电性接触时供电给ups模块32,ups模块32将轨道取电模块31供应的电输出作为工作电源且同时供给储能模块33充电,当轨道取电模块31未能供电给ups模块32,所述ups模块32立即从储能模块33取电并输出作为工作电源。
77.请参阅图18-21,所述行走机构4包括动力组件41与转角组件43。所述动力组件41安装于底座箱体30连接电箱组件5一端的底部,所述转角组件43相对动力组件41安装于底座箱体30的另一端底部。所述动力组件41包括安装座板411、分别安装于安装座板411一侧两端的两动力轮支架413、及分别安装于两动力轮支架413上动力轮415。所述动力轮415包括动力电机4151及安装于动力电机4151的转轴上的行走轮4153。所述两动力轮支架413相对设置,两行走轮4153分别位于两动力轮支架413外侧,且分别位于底座箱体30的两侧。
78.请一并参阅图22-23,所述转角组件43包括安装支板430、安装于安装支板430上的转角电机431、安装于转角电机431的转轴上的驱动齿轮432、可转动安装于安装支板430上的转向轴433、安装于转向轴433一端上的转向齿轮434、安装于转向齿轮434上远离安装支板430一侧的转向轮支架435、及安装于转向轮支架435的转向轮436。所述转向轴433通过轴承座437、滚动轴承438、平面轴承439、轴套440可转动地安装在安装支板430上。所述转角电机431通过电机固定板441固定安装在安装支板430上。所述转向轮支架435可随转向齿轮434转动进而带动转向轮435转向。所述驱动齿轮432与转向齿轮434啮合,通过转角电机431转动带动驱动齿轮432驱动转向齿轮434转动,从而实现转向轮436的转向。所述转向轮436位于底座箱体30远离动力组件41一端底部的中间。
79.通过控制两动力电机4151的转速差来实现控制两动力轮415的转速差,且同时通过控制转角电机431的转动来实现控制转向轮436的转向角度,在两动力轮415的转速差与转向轮436的转向角度共同配合下,来实现行走机构4带动底座组件3在行进中的转向。当两动力轮415的转速差为0,且转向轮436的转向角度为0,行走机构4带动底座组件3直线行进。
80.本发明行走机构4的设置及转向方式,可以实现转弯半径更小,使有限的场地空间利用最大化,并且实现转向更稳定,尤其能有效防止高速行走时转向引发的侧倾事故。
81.请参阅图24-27,所述轨道取电模块31安装于底座箱体30的靠近动力组件41的底部。所述轨道取电模块31包括安装基板310、安装于安装基板310上的伸缩电机311、安装在伸缩电机311的转轴上的旋转板312、两个一端分别连接在旋转板312上的连杆313、两个分别连接连杆(313)另一端的伸缩板314、两组分别安装在伸缩板314一侧两端的滑动板315、两根穿过滑动板315的滑动轴316、及两个分别安装在两组滑动板315外侧的导电刷317。通过伸缩电机311转动带动旋转板312转动,进而带动连杆313产生摆动,连杆313的摆动对伸缩板314产生推拉作用,从而带动滑动板315相对滑动轴316产生来回移动,进而带动导电刷317产生伸缩运动。当需要导电刷317进入取电工作状态时,则让导电刷317伸出,进入工作状态;反之,则让导电刷317收缩,处于防止受到外物碰触的保护状态。所述安装基板310与滑动轴316分别安装在底座箱体30上。所述滑动板315与滑动轴316之间安装有轴承318,以利于滑动板315相对于滑动轴316之间的滑动。导电刷317具有接触刷头3172,且其能提供弹性力给接触刷头3172,以在导电刷317处于工作状态时,接触刷头3172能受弹性力抵靠在供电导轨10上。该提供弹性力的方式可以采用现有技术手段来实现,例如导电刷317内置弹簧。所述接触刷头3172为两个,以提供更大的接触面积,提升工作稳定性与电力负荷能力。
82.请参阅图15-16,所述底座组件3还可以进一步设置导向轮35与避障器36以提升本发明机器人的通过性,且通过防止意外撞击,降低了故障率,且提升了使用寿命。具体地,在底座箱体30的前后两端面两侧对应四个角的位置分别设有导向轮35,使得前后左右四个表面最外突出位置就是导向轮35,以进行更好的导向。在前后两端面分别装有两个避障器36,以对前后方进行有效的扫描,及时发现路障,并避免碰撞。通过所述导向轮35与轨道1的接触,有利于轨道1实现对机器人2行走限位。
83.请一并参阅图1-4b、图15-16与图24-27,所述机器人2进入轨道1时,两端面的导向轮35进入轨道1相对的防撞板103区域,在即将进入电刷导向板105区域时,机器人2两侧的轨道取电模块31的导电刷317伸出,再继续前行后,导电刷317经由电刷导向板105后进入衔接件106,再进入滑触线102,每侧的导电刷317的两个接触刷头3172分别弹性抵靠在两条滑触线102上以实现取电。
84.综上所述,本发明分拣或拣选服装的系统采用两端开放的多组轨道,可供采用路面轮式行走机构的机器人在轨道间行走,机器人可从每组轨道相对的供电导轨取电来工作,并且可以同时给储能模块充电,实现边工作边给储能模块充电,减少在工作之外安排给储能模块充电的不便,例如需要做额外的充电操作,甚至因充电而影响工作时长,在未能从供电导轨取电时,例如离开供电导轨或停电时,通过储能模块给ups模块供电实现机器人的不间断供电,从而机器人可以脱离供电导轨行走,有利于不同工作区域的调度,且通过供电导轨供电可以保障机器人连续长时间工作。本发明分拣或拣选服装的系统采用两端开放的多组轨道,可供采用路面轮式行走机构的机器人在轨道间行走,行走灵活,可以在更大的场地范围内调度使用机器人,可以降低配备机器人的数量,降低物流系统成本,且可根据工作量需要进行调度安排机器人,合理利用机器人进入工作的数量,节约能源。在机器人检修或出现故障时,可以随时以其它机器人来替补,不需要配备备用机器人或停工。本发明分拣或拣选服装的系统采用两端开放的多组轨道,可供采用路面轮式行走机构的机器人在轨道间
行走,并且机器人的行走机构转弯半径小,可以减少轨道两端的开放空间,充分利用场地空间,而且能有效避免转弯产生的侧倾,行走快速且稳定,工作效率高。本发明分拣或拣选服装的系统采用两端开放的多组轨道,可供采用路面轮式行走机构的机器人在轨道间行走,并且能对轨道内行走的机器人进行限位,提升机器人的行走稳定性,利于机器人的快速行走,提高工作效率,且通过导向轮与轨道的接触实现行走限位,有利于缓解机器人与轨道之间的撞碰与摩擦,延长轨道使用寿命。本发明分拣或拣选服装的系统设有激光高度传感器与反光测量传感器,可以保障抓取机构的稳定有效抓取商品,避免碰撞或无效操作,同时在商品取空后及时反馈,提升物流效率。本发明分拣或拣选服装的系统在旋转平台上设置第一接近开关、第二接近开关与第三接近开关,通过第一接近开关控制在待机时保持摇臂组件于初始位置,可以保障重心在中心,有利于行走稳定,通过第二与第三接近开关控制旋转平台转动摇臂组件的两个极限摆动位,防止机器人的重心偏离过多而造成机器人行走时不稳。本发明分拣或拣选服装的系统将吸盘连接在活塞上,抽真空吸取商品时,也将吸盘吸进气缸缸体,使得商品可以抵靠在气缸下盖上,从而防止因商品上升过程中摇晃引发破真空导致商品脱落的问题,保障系统高效稳定工作。
85.以上所述,对于本领域的普通技术人员来说,可以根据本发明的技术方案和技术构思作出其他各种相应的改变和变形,而所有这些改变和变形都应属于本发明后附的权利要求的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。